接口文档
VR 端软件使用
如何使用
克隆代码
# ssh
git clone --depth=1 ssh://git@www.lejuhub.com:10026/highlydynamic/kuavo-ros-control.git
# 或者https
git clone --depth=1 https://www.lejuhub.com/highlydynamic/kuavo-ros-control.git
根据需要选择某个分支(一般稳定一些为beta),然后更新子仓库
git checkout dev
git submodule update --init --recursive
确认机器人版本和总质量
机器人版本
机器人版本通过环境变量
$ROBOT_VERSION设置,版本号涉及不同机器人模型、硬件设置等, 需要和自己的机器人匹配。在终端执行
echo $ROBOT_VERSION查看当前设置的版本号,如果没有设置,通过以下设置版本号(其中的40代表4.0版本,根据实际情况修改):在当前终端执行(临时设置):
export ROBOT_VERSION=45将其添加到你的
~/.bashrc或者~/.zshrc终端配置文件中: 如执行:`echo 'export ROBOT_VERSION=45' >> ~/.bashrc `添加到
~/.bashrc文件(bash终端)末尾,重启终端后生效
机器人质量
- 由于每台机器人的选配不同,质量也不同,需要确认机器人的总质量,确保模型准确。(出厂时的质量会修改正确一次)
- 机器人总质量存储于
~/.config/lejuconfig/TotalMassV${ROBOT_VERSION}文件中(${ROBOT_VERSION}为上述设置的版本号),编译时会自动读取该文件,校准仓库中的模型质量。 - 机器人称重之后,将总质量写入
~/.config/lejuconfig/TotalMassV${ROBOT_VERSION}文件中即可。 - ocs2中使用了cppad自动微分库,cppad的缓存与模型相关
- 因此每次修改总质量文件时,会
自动删除缓存目录/var/ocs2/biped_v${ROBOT_VERSION}, 下一次运行时会自动重新编译cppad模型(大概4分钟) - 如果手动修改了仓库中的模型,会导致缓存失效,再次运行时会重新编译cppad模型
- 因此每次修改总质量文件时,会
编译
docker环境
在没有机器人运行环境的情况下,可以使用docker环境进行编译和仿真使用。
- docker镜像可以自行根据后续章节使用
./docker/Dockerfile构建,或者下载已经编译好的镜像:
wget https://kuavo.lejurobot.com/kuavo_research_editiion/docker_images/kuavo_opensource_mpc_wbc_img_v1.3.0.tar.gz
- 执行以下命令导入容器镜像:
docker load -i kuavo_opensource_mpc_wbc_img_v1.3.0.tar.gz
- 执行
./docker/run.sh进入容器后,默认在仓库的映射目录/root/kuavo_ws,执行以下命令开始编译:
catkin config -DCMAKE_ASM_COMPILER=/usr/bin/as -DCMAKE_BUILD_TYPE=Release # Important!
# -DCMAKE_ASM_COMPILER=/usr/bin/as 为配置了ccache必要操作,否则可能出现找不到编译器的情况
source installed/setup.zsh # 加载一些已经安装的ROS包依赖环境,包括硬件包等
catkin build humanoid_controllers #会编译所有依赖项
注意:容器镜像内部默认使用zsh
实机环境
- kuavo实机镜像如果较旧,需要手动安装一些依赖项:
# 提供了一个脚本用于快速在旧的kuavo实机镜像进行安装依赖
./docker/install_env_in_kuavoimg.sh
- 如果是干净的发行版的ubuntu20.04,可以直接通过脚本安装所有依赖:
./scripts/kuavo_environment_setup.sh
- 实物编译
cd kuavo-ros-control #仓库目录
sudo su # 实物需要在root用户下运行,重要!
catkin config -DCMAKE_ASM_COMPILER=/usr/bin/as -DCMAKE_BUILD_TYPE=Release # Important!
catkin build humanoid_controllers
# 如果使用 DDS 通信(可选)
catkin clean -y # 如果编译过,则需要清理,否则请忽略
catkin build humanoid_controllers --cmake-args -DUSE_DDS=ON
# 如果使用 LEJU DDS 通信(可选)
catkin clean -y # 如果编译过,则需要清理,否则请忽略
catkin build humanoid_controllers --cmake-args -DUSE_LEJU_DDS=ON
运行
仿真运行
- 使用mujoco仿真器
source devel/setup.bash # 如果使用docker环境,则使用source devel/setup.zsh
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch # 启动控制器、mpc、wbc、mujoco仿真器
- 使用gazebo仿真器
catkin build humanoid_controllers gazebo_sim # 需要编译gazebo_sim包
source devel/setup.bash # 如果使用docker环境,则使用source devel/setup.zsh
roslaunch humanoid_controllers load_kuavo_gazebo_sim.launch # 启动控制器、mpc、wbc、gazebo仿真器
- 使用isaac-sim仿真器
catkin build humanoid_controllers isaac_sim # 需要编译isaac_sim包
source devel/setup.bash # 如果使用docker环境,则使用source devel/setup.zsh
roslaunch humanoid_controllers load_kuavo_isaac_sim.launch # 启动控制器、mpc、wbc、isaac_sim仿真器
kuavo_humaniod_sdk测试
大致步骤如下,具体可查看Kuavo_Humaniod_SDK搬箱子案例:
- 编译
catkin build humanoid_controllers kuavo_msgs gazebo_sim ar_control
- 运行:
# 启动gazebo场景
roslaunch humanoid_controllers load_kuavo_gazebo_manipulate.launch joystick_type:=bt2pro
# 启动ar_tag转换码操作和virtual操作
roslaunch ar_control robot_strategies.launch
# 运行搬箱子案例
python3 grasp_box_example.py
实物运行
末端执行器配置
在运行实物之前, 您需要先修改src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json中EndEffectorType为您实物机器人的执行器类型:
none: 无末端执行器或者需要屏蔽末端执行器时使用qiangnao: 灵巧手, 默认值lejuclaw: 二指夹爪qiangnao_touch: 触觉灵巧手revo2: revo2 二代灵巧手, 仅支持 Roban !
在运行实物时,您可以通过指定ruiwo_cxx_sdk参数来选择手臂电机使用 C++ SDK 还是 Python SDK:
- 默认值为
true表示使用 C++ SDK false表示使用 Python SDK, 比如roslaunch humanoid_controllers load_kuavo_real.launch ruiwo_cxx_sdk:=true
实物运行时,开机第一次建议先在cali模式下运行一次,确认机器人姿态和位置正确(机器人所有关节回到零位)
- 实物运行命令:
sudo su # 实物需要在root用户下运行,非常重要!
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true # 以校准模式启动
- 零点标定(当校准模式下发现零点不对时才需要进行)
- 机器人的零点是指所有电机在零位置时的位置, 此时机器人姿态处于完全伸直的状态;
- 零点标定在机器人出厂时会完成一次,除非更换电机或者编码器,其他情况只需要进行
重启之后的实物零点校准流程即可。 - 电机的零点存储有两个地方:
- 腿部和肩膀两个电机的零点位置存储于
~/.config/lejuconfig/offset.csv文件中, 每个关节对应一行, 顺序为从躯干出发,左腿、右腿、左肩、右肩的电机;- 腿部零点手动标定过程:
- 将机器人所有关节摆到零位(可以使用工装等硬件设备进行固定)
- 打开机器人急停按键给机器人电机上电
- 运行程序(增加cali:=true参数),在使能完腿部电机后(打印出如下图的位置之后), 即可关闭程序(零点校准之前电机运动可能会超出限位)
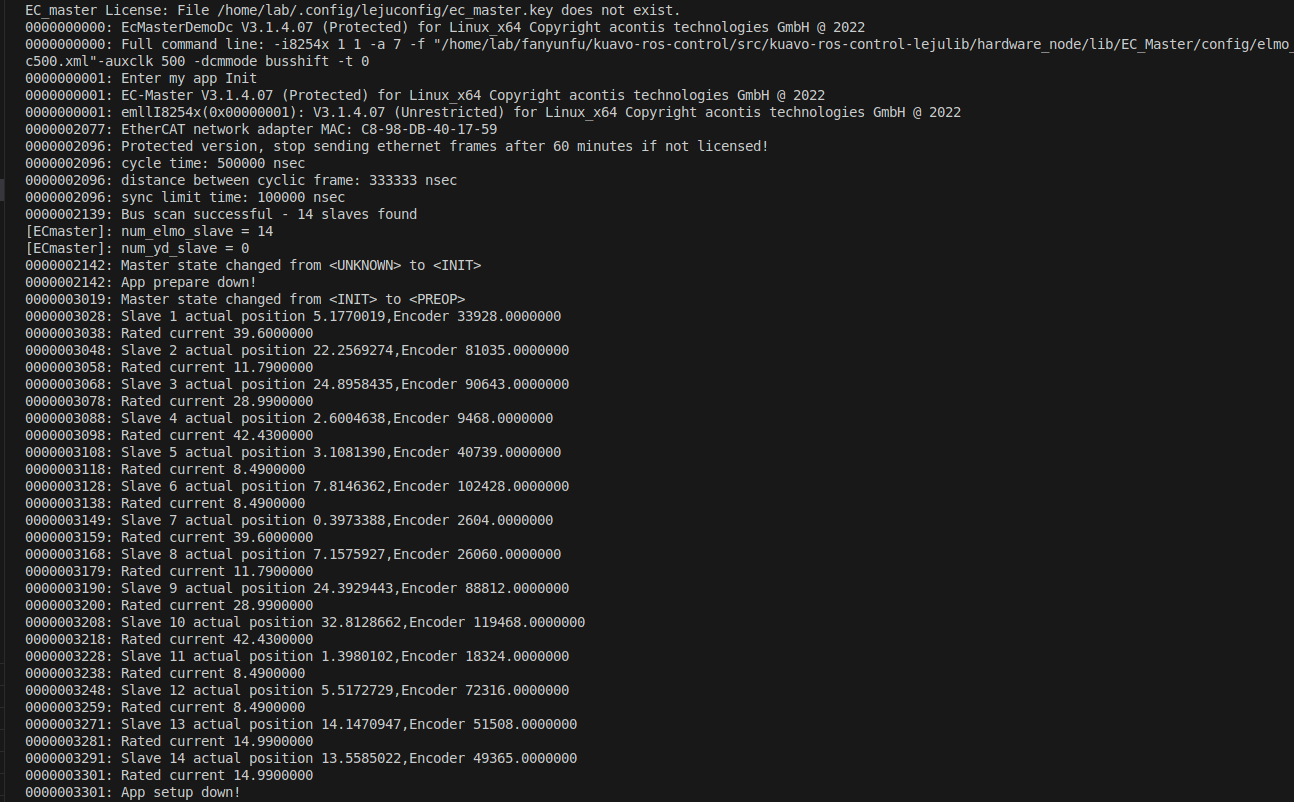
- 其中的
Slave xx actual position 5.1770019即这个电机的实际位置 - 将需要标零的电机位置复制到
offset.csv文件中对应的行中即可, 注意不要有多余的空行
- 腿部零点辅助标定过程:
- 将机器人所有关节摆到零位(可以使用工装等硬件设备进行固定)
- 打开机器人急停按键给机器人电机上电
- 运行程序(增加cali_leg:=true参数)
- 腿部电机进入使能状态之后,按'c'键,自动保存腿部当前位置作为零点
- 腿部零点手动标定过程:
- 手臂的零点位置存储于
~/.config/lejuconfig/arms_zero.yaml文件中,如需微调某个关节可以调整- 手臂校准在root下执行
rosrun hardware_node setZero.sh将会以当前手臂位置作为零点并保存到配置文件中; - 多圈的情况下手臂后续无需校准, 没有多圈记忆功能的机器重启之后需要按下述手臂校准流程校准手臂零点所在圈数
- 手臂校准在root下执行
- 腿部和肩膀两个电机的零点位置存储于
- 电机的运动方向:
- 电机的旋转方向和机器人的坐标系正方向一致,符合右手定则。用右手握住电机旋转轴,让拇指指向旋转轴的正方向(旋转轴正方向和机器人的坐标系正方向一致)其余四指的弯曲方向表示旋转的正方向。
- 机器人正方向:往前->x轴正方向,往左->y轴正方向,往上->z轴正方向。
- 比如1号髋关节roll轴心与机器人x轴平行,则该电机根据右手定则,绕着机器人x轴旋转的方向即为正方向。
- 再如:踝关节是由并联杆控制,两个电机轴心与机器人y轴平行(4代),则该电机根据右手定则,绕着机器人y轴旋转的方向即为正方向。
注意:膝关节比较特殊,膝关节正方向判断应该看关节的旋转方向而不是看电机的旋转方向(4代上无影响,4pro上的反关节会有差异)
- 腿部和手臂零点校准方法
- **腿部校准**:
1. 手动校准
- 开机时手动掰机器人各个关节的电机回到零位所在圈数内,打开机器人急停按键给机器人电机上电
- 运行程序,机器人进入全身伸直姿态,看所有关节是否都回到零位,如果不在零位处,则单独反方向掰动该关节,关闭再重新打开急停按键,重复运行程序步骤直到所有关节都回到零位
2. 工装校准(有工装时,推荐的方式):
- 机器人腿部电机都回到零点位置,插上工装
- 启动程序luanch时,传入cali_leg:=true参数,根据提示,按`c`,程序会自动将腿部电机的位置保存到配置文件中
3. 辅助校准,在`cali:=true`模式下, 提供了一个辅助校准流程:
- 运行程序,机器人进入全身伸直姿态,看所有关节是否都回到零位
- 如果需要校准,则根据终端提示输入'c'进入腿部校准模式, 输入'v'进入手部校准模式,输入`a`进入手臂限位自动校准的模式
- 校准腿部的模式下:
1. 输入 'l' 或 'r' 选择要校准的左腿或右腿。
2. 输入 1-6 选择要校准的电机。
3. 输入 'w' 增加编码器圈数,输入 's' 减少编码器圈数(注意:电机会移动!)
4. 输入 'c' 保存校准结果(断电之前都无需重新校准),输入 'q' 退出校准。
- 校准手部的模式下:
1. 输入 'l' 或 'r' 选择要校准的左手或右手。
2. 输入 2-7 选择要校准的电机(只校准瑞沃关节的电机)。
3. 输入 'w' 增加编码器圈数,输入 's' 减少编码器圈数(注意:电机会移动!)
4. 输入 'd' 将手臂电机掉使能(此时可以掰动手臂电机), 输入 'e' 重新使能
5. 输入 'f' 以当前手臂位置作为零点并保存
6. 输入 'c' 保存校准结果(断电之前都无需重新校准),输入 'q' 退出校准。
- 根据需要通过上述按键组合逐圈调整电机, 直到所有关节都回到零位所在圈。
- > 注意:按`w`和`s`键时,请仔细确认运动方向正确,不要反方向调节,否则会触发电机的限位保护,程序退出。
- **手臂校准**:
1. 手臂的位置需求不那么准确时,可以通过`cali`模式下再传入一个`cali_arm=true`,将会以当前位置作为手臂的零点,并保存到配置文件中。
2. 手臂限位自动零点校准(限位准确无遮挡时推荐使用):
- 输入 'a' 进入手臂限位自动校准模式
- 选择校准模式:
1. 输入 '1' 选择自动校准模式(所有关节组自动依次校准)
2. 输入 '2' 选择逐个校准模式(每组关节需要手动确认后运动)
- 校准过程:
1. 机器人会先将手臂移动到一个安全姿态
2. 从末端关节组开始逐组向近端校准(左右对称关节同时校准)
3. 每组关节会自动移动到预设的限位位置
4. 自动检测限位(基于速度、位置方差、超时等条件)
5. 检测到限位后立即记录位置并计算零点偏移,更新零点
6. 完成一组后移回安全姿态,继续下一组
7. 所有组校准完成后,手臂移动到零位姿态验证校准效果
- 校准完成后:
1. 输入 's' 保存校准结果到配置文件
2. 输入其他键放弃保存(EC电机零点会恢复到原始值)
- 配置参数(在 kuavo.json 中可调):
- `arm_calibration_velocity`: 校准移动速度(默认15度/秒)
- `arm_calibration_timeout`: 单个关节校准超时时间(默认20秒)
- `arm_calibration_position_variance_time`: 位置方差检测时间窗口(默认0.4秒)
- `arm_calibration_position_variance_threshold`: 位置方差阈值(默认0.1度²)
- `calibration_safe_pose`: 校准过程中的安全姿态
- `arm_calibration_limits`: 各关节的目标限位位置
- `arm_calibration_directions`: 各关节的校准运动方向
- > 注意:限位校准会让关节主动运动到机械限位,请确保机器人周围无障碍物且处于安全状态!注意:没有多圈编码器记忆功能的版本(4.2版本以上都有该功能),电机断电之后,开机都需要手动校准一次;腿部的辅助校准功能只用于关机重启之后校准编码器圈数, 即需要确认此前的腿部零点是正常的, 否则请先手动校准一次。
- 运行程序之后,机器人会进入待站立阶段,确认无误之后,准备扶住机器人,然后按
o启动机器人,机器人回开始运动到站立状态,并开启反馈控制。
实物运行-只使能上半身
即不控制机器人的下肢关节, 只控制机器人的上半身(手臂和头部关节), 方便在只使用手臂和头部关节的场景快速开发和调试.
- 修改配置文件
修改
src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json配置文件中的only_half_up_body配置项, 将其设置为true.
// 大约在 38 行
"only_half_up_body":true,
- 确认一下胸部 NUC 的 CPU 型号, 可以执行以下命令查看:
lscpu |grep Intel
如果输出如下所示, 说明 NUC 的 CPU 型号为i9:
Vendor ID: GenuineIntel
Model name: 13th Gen Intel(R) Core(TM) i9-13900H
如果输出如下所示, 说明 NUC 的 CPU 型号为i7:
厂商 ID: GenuineIntel
型号名称: 12th Gen Intel(R) Core(TM) i7-12700
- 运行
注意: 不同类型的 CPU 型号, launch 启动命令不同(性能有差异).
对于i9型号的 CPU, 执行以下命令启动机器人:
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch
对于i7型号的 CPU, 执行以下命令启动机器人:
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_half_up_body.launch
其他操作步骤和 实物运行章节一样, 您可阅读该章节进行操作.
运行程序之后, 根据终端中的提示(会提示按o启动机器人),然后按o启动机器人。
实物运行-轮臂机器人
- 修改配置文件
修改
src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json配置文件中的only_half_up_body配置项, 将其设置为true.
// 大约在 38 行
"only_half_up_body":true,
修改配置文件中的 MOTOR_TYPE , 为前 12 个电机追加 _none 来屏蔽下肢关节(轮臂机器人无腿部关节), 如下图.
"MOTORS_TYPE":[
"PA100_18_none", "PA100_none", "PA100_none", "PA100_18_none", "CK_none", "CK_none",
"PA100_18_none", "PA100_none", "PA100_none", "PA100_18_none", "CK_none", "CK_none",
"PA100", "ruiwo", "ruiwo", "ruiwo", "ruiwo", "ruiwo", "ruiwo",
"PA100", "ruiwo", "ruiwo", "ruiwo", "ruiwo", "ruiwo", "ruiwo", "ruiwo", "ruiwo"],
- 运行 本步骤和 实物运行-只使能上半身章节一样, 您可阅读该章节进行操作.
手柄控制
遥控器型号通过运行时launch参数,joystick_type指定,在
src/humanoid-control/humanoid_controllers/launch/joy目录指定了按键映射关系,新增遥控器类型可以直接添加自己的按键映射关系到json文件中,运行时通过joystick_type:=bt2pro传递相应文件名即可
- joystick_type:=bt2 使用的手柄型号为"北通阿修罗2无线版",参考的遥控器键位如下,其他型号需要自行修改遥控器节点:

字母键切换gait
- A: STANCE
- B: TROT
- X: RL/MPC
- Y: WALK
摇杆控制腿部运动
- 左摇杆控制前后左右
- 右摇杆控制左右转和上下蹲
按钮发送固定target
start键实物控制时用于从悬挂准备阶段切换到站立
back键用于退出所有节点
ABY键切换步态模式,X键切换MPC控制器和RL控制器
RL模式下:
- 推摇杆即走、放摇杆即停
- 按Y手动切换到RL的原地踏步,推摇杆即走、放摇杆维持原地踏步(注意有的RL控制器如AMP没有手动切换行走功能,只需要推摇杆即走)
- 按A手动切换到RL的站立
MPC模式下:
- 推摇杆即走、放摇杆即停
- 按Y手动切换到MPC的原地踏步,推摇杆即走、放摇杆维持原地踏步
- 按A手动切换到MPC的站立
RT+右摇杆可以控制头部
在五代、roban2等机型上,存在腰部yaw自由度,可以通过LT+右摇杆实现腰部控制
手动触发倒地状态(全身掉使能)(仅roban2.1)
- RB+B键,注意按下之后会全身掉使能,所以手动触发时可以先提着机器人
倒地起身(仅roban2.1)
- 倒地之后(无论是初始传入init_fall_down_state从倒地状态起来还是手动触发倒地),按下RB+X键,机器人会首先插值到起身姿态
- 再次按下RB+X键,自动起身,并进入MPC控制器
- 前后倒地起身会自动识别
- 起身过程如果再次按下RB+X键,会结束起身过程,回到全身掉使能状态
joystick_type:=h12 使用的手柄型号为"H12pro",参考的遥控器键位如下

- 摇杆控制腿部运动
- 左摇杆控制前后左右
- 右摇杆控制左右转和上下蹲
- 实物start开关掰到最中间位置可以结束悬挂准备阶段,进入站立状态
- 左侧开关掰到最中间终止程序
- 切换MPC/RL控制器,站立状态下按C键
HumanoidAutoGaitJoyCommandNodeVel节点(默认)
- 发送/cmd_vel消息给MPC
- 摇杆往前推,自动切换到walk行走,到达target之后自动停止
- 按钮发送固定target也会自动切换walk行走,自动停止
- 在stance状态时手动切换gait之后,会变成手动模式,通过摇杆可以控制运动,不会自动停止,直到重新切换回stance
HumanoidJoyCommandNode节点
- 没有自动切换gait的遥控器节点
note: 手柄控制实物的
load_kuavo_real.launch默认打开手柄控制,插上手柄接收器即可使用,仿真的launch文件,需要传入use_joystick:=true参数开启
开机自启动遥控器就可以控制机器人的功能,文档 link, 目前支持 h12pro controller 并且按键功能与上述 h12 不完全一致,请仔细阅读使用文档
QUEST3 VR控制
- 按照前面的步骤正常启动机器人
单独启动VR节点
- 运行
旧版镜像如果没有包含VR相关依赖,需要手动安装:
cd src/manipulation_nodes/noitom_hi5_hand_udp_python && pip install -r requirements.txt && cd -source devel/setup.bash
# VR先和机器人连到同一局域网, VR 会广播 自身IP 到局域网中
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch
# 可选配置参数:use_cpp_ik
# 启动python版本的ik
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch use_cpp_ik:=false
# 启动C++版本的ik
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch use_cpp_ik:=true
# 可选配置参数:use_incremental_ik(仅当use_cpp_ik:=true 时,可选是否启用增量式IK)
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch use_cpp_ik:=true use_incremental_ik:=true如果希望同时映射躯干的运动(上下蹲和弯腰),可以增加选项
control_torso:=1,使用前务必在站立状态下长按VR右手柄的meta键以标定躯干高度。默认控制双手,如果需要控制单手,可以增加选项
ctrl_arm_idx:=0, 其中0,1,2分别对应左手,右手,双手如果手动输入VR的IP地址, 在启动命令后追加参数
ip_address:=192.168.3.32(替换成VR的实际IP地址)现在 VR 头盔中的 APP 会自动广播自身IP,启动节点不需要手动输入 ip,但是假如 VR 节点程序关掉了,你需要在 VR 头盔中重新打开 VR 程序,才会重新广播IP
现在 vr 控制默认启动头部控制,如果不需要控制头部,可以增加选项
enable_head_control:=false同时启动VR节点和机器人
- 运行
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_with_vr.launch全程使用VR的手柄控制即可
- 启动时按A键站立(从启动等待开始状态站立,相当于kuavo中的按o);
- 停止机器人,同时按下左侧XY两个键,停止机器人
- 自动模式下,推摇杆即走,松摇杆自动立即停止
- 按下A(stance)、B(walk)也可以手动切换gait
- 扳机控制手指开合,Y键用于锁定或解锁手指控制
- 默认摇杆左摇杆控制前后,右摇杆控制左右转;
- 当手放到一侧的两个按钮上时(只接触不按下),切换为对侧为控制左右或者高度
- 如手指覆盖住左侧的XY键,则右侧摇杆切换为高度控制
- 手贴在左侧XY键,右侧摇杆会自然地变为高度控制,按下去即可关闭程序;
- x键为手臂模式切换辅助键,按住x键之后,其他按键的作用如下:
- X+A:手臂模式切换为外部控制/自动摆手
- X+B:手臂模式切换为保持姿态/自动摆手
- 手臂模式目前有三种:保持(0)、自动摆手(1)、外部控制(2)
- 按了X+B在保持模式下再按X+A,可以直接从保持模式切换到外部控制模式
- Y 键为末端质量设置辅助键,按住 Y 键之后,其他按键的作用如下:
- A:机器人末端应用设置的末端质量以及对应方向的施力
- B:机器人末端释放末端质量以及相关方向的力
- VR低时延模式
- 在使用有线连接情况下,建议使用低时延模式,可以实现更快速的动作
- 启动VR之后,按下左边前扳机+X,开启低时延模式;按下左边侧扳机+X,关闭低时延模式
- VR映射躯干的运动(上下蹲和弯腰)使用前务必在站立状态下长按VR右手柄的meta键以标定躯干高度然后同时按下两个手柄前扳机键启动手臂控制
- 通过给launch_quest3_ik.launch文件传入参数
control_torso:=true才能开启躯干控制 - 启动VR之后,先长按手柄左右扳机,解锁手臂和躯干跟踪映射
- 左手大拇指同时触摸XY两个按键(注意不要按下)+同时右手按下B键,开启映射躯干模式;再次左手大拇指同时触摸XY两个按键(注意不要按下)+同时右手按下B键,关闭映射躯干模式
- 开启或者关闭均需在站立情况下进行
在五代、roban2等机型上,存在腰部yaw自由度,VR可以通过触摸Y+右摇杆实现腰部控制
- 通过给launch_quest3_ik.launch文件传入参数
- VR切换控制器(MPC/RL控制器)
- 左手大拇指同时触摸XY两个按键(注意不要按下),同时右手按下A键, 可切换到下一个控制器
- 两种控制器都是推摇杆即走,松摇杆自动立即停止
- 按B切换到手动原地踏步模式,A切换站立
- VR右摇杆单步转向
- 需要在
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik.launch启用时需在启动时传入参数use_step_turning:=true - 目前分为 4 档转向: 15°, 30°, 45°,60°, 大约占比摇杆区间行程的:0~15%, 15~45%,45~75%,75~100%
- 注意只有当左摇杆不动时(即没有控制前后左右运动),右摇杆左右操作才会进行单独转向,否则会采用普通模式进行转向
- 正常站立时,左手摇杆左右控制单步转身
- VR按 B 进入踏步状态后,左手摇杆左右控制踏步转身
- 需要在
- VR头部控制系统
- 配置文件位置:
src/manipulation_nodes/noitom_hi5_hand_udp_python/scripts/config.json - 支持四种控制模式:
fixed:固定模式,将头部yaw和pitch设置为0(正前方),平滑移动到目标位置auto_track_active:自动跟踪主动手模式,自动检测并跟踪移动的手fixed_main_hand:固定主手模式,跟踪指定的手(left/right)vr_follow:VR随动模式,由VR设备直接控制
- 可配置参数:
joint_limits:头部关节角度限制(yaw/pitch,单位:度)smoothing_factor:平滑滤波系数(0-1,越大越平滑)active_hand_threshold:主动手检测阈值(单位:米,越小越敏感)
- 系统会自动从TF树获取头部和手部的实时位置进行计算,确保坐标系一致性
- 运行时动态切换模式(ROS服务):
服务名称:
/quest3/set_head_control_mode服务类型:
kuavo_msgs/SetHeadControlMode调用方式:
# 固定模式(将头部移动到正前方)
rosservice call /quest3/set_head_control_mode "{mode: 'fixed', fixed_hand: ''}"
# 自动跟踪主动手模式
rosservice call /quest3/set_head_control_mode "{mode: 'auto_track_active', fixed_hand: ''}"
# 固定主手模式(跟踪左手)- fixed_hand参数必需
rosservice call /quest3/set_head_control_mode "{mode: 'fixed_main_hand', fixed_hand: 'left'}"
# 固定主手模式(跟踪右手)- fixed_hand参数必需
rosservice call /quest3/set_head_control_mode "{mode: 'fixed_main_hand', fixed_hand: 'right'}"
# VR随动模式
rosservice call /quest3/set_head_control_mode "{mode: 'vr_follow', fixed_hand: ''}"参数说明:
mode:控制模式字符串,必需参数fixed_hand:固定主手模式时的手("left" 或 "right"),仅在mode为"fixed_main_hand"时必需,其他模式可传入空字符串""
响应说明:
success:是否成功设置模式message:操作结果消息current_mode:当前生效的模式
- 配置文件位置:
开启手势识别,可以增加选项
predict_gesture:=true,利用神经网络预测手势,灵巧手会直接根据手势预测结果进行运动,目前支持的手势有(只有当预测结果同时满足:高置信度(>80%)明显优于第二预测(差值>0.3)预测分布集中(熵值<0.8)才会返回具体的手势类别。否则会认为预测失败,灵巧手会采用原来的方式控制):- 单指点(外展式):
finger-pointing-opposed - 五指抓取:
cylindrical-grip - 666手势:
shaka-sign - 两只捏(外展式):
precision-pinch-unopposed - 握拳:
fist - 点赞:
thumbs-up - 五指张开:
palm-open - 三指捏:
tripod-pinch-unopposed - 兔子头手势:
rock-and-roll - 二指夹(外展式):
two-finger-spread-unopposed
如果希望从机器人双手平放开始控制,可以运行
rosrun motion_capture_ik scripts/tools/lay_robot_hands_flat.py,机器人会自动将双手平放
QUEST3 视频流
- 在上位机(带有摄像头的) clone 本仓库后,克隆以下仓库并且编译
cd <kuavo-ros-control>
sudo apt install v4l-utils
git clone --depth=1 https://github.com/ros-perception/image_common.git --branch noetic-devel src/image_common
git clone --depth=1 https://github.com/ros-perception/image_pipeline.git --branch noetic src/image_pipeline
git clone --depth=1 https://github.com/ros-drivers/usb_cam.git --branch develop src/usb_cam
cd <kuavo-ros-control>
catkin build usb_cam noitom_hi5_hand_udp_python
在上位机运行
source devel/setup.bash后,运行roslaunch noitom_hi5_hand_udp_python usb_cam_node.launch即可在下位机运行
roslaunch noitom_hi5_hand_udp_python launch_quest3_ik_videostream_usb_cam.launch即可
键盘控制
如没有手柄或者VR等,可以使用键盘控制节点进行控制, 如运行仿真器并且使用键盘控制节点
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch joystick_type:=sim运行后将会启动仿真,并且在另外一个终端窗口打开键盘控制窗口,按键控制机器人运动,具体按键如下:
WASD: Left stick, control forward/backward, left/right
IKJL/QE: Right stick, up/down, turn left/right
R: walk, C: stance, T: trot
B: BUTTON_BACK, O/F: BUTTON_START
<space>: Reset all axes to zero
Press Ctrl-C to exit
- 键盘控制节点也单独可以手动开启,可以运行多个
source devel/setup.bash
rosrun humanoid_interface_ros joystickSimulator.py
示例
- 基于 MPC 控制机器人行走特定轨迹(直线,正方形,圆形,S 曲线) 示例
/cmd_vel控制机器人行走特定轨迹(正方形, 圆形, S 曲线) 示例- 键盘控制机器人手臂运动示例
- 基于 apriltag 抓取示例
- 倒地起身说明文档(目前仅支持roban2.1)
工具
Kuavo 开机播报 WIFI 工具
本工具提供机器人开机后, 语音提示已连接的 WIFI 信息(名称和IP). 若在一定时间内未连接WIFI,则会自动切换 AP 热点模式, 您可以使用 VNC或SSH连接机器人, 切换到对应的WIFI.
更多详细安装和使用步骤请阅读README文档.
Kuavo 热点工具
本工具提供机器人同时连接 WIFI 并开启热点功能, 方便用户连接到机器人.
更多详细安装和使用步骤请阅读README文档.
Build docker image&container for Kuavo-MPC-WBC
1. Install Docker
Follow the instructions on the official Docker website to install Docker on your system.
2. Build docker imags with a dockerfile
We provide a dockerfile for Kuavo-MPC-WBC. You can use it to build a docker image for Kuavo-MPC-WBC. You just need to run the following command, which will build the docker image kuavo_mpc_wbc_img:0.3 from the ./docker/Dockerfile.
./docker/build.sh
run docker container
1. Run docker container
You can run a docker container with the following command:
docker run -it --net host --name kuavo_container --privileged -v /dev:/dev -v "${HOME}/.ros:/root/.ros" -v "./.ccache:/root/.ccache" -v "./:/root/kuavo_ws" -v "${HOME}/.config/lejuconfig:/root/.config/lejuconfig" --group-add=dialout --ulimit rtprio=99 --cap-add=sys_nice -e DISPLAY=$DISPLAY --volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" kuavo_mpc_wbc_img:0.3 bash
2. for GPU Version
If you want to use GPU version of Kuavo-MPC-WBC, you just need to add the --gpus all command to the docker run command.
3. we provide a script to run the docker container
You can run the docker container with the following command:
./docker/run.sh
This script will automatically find the exisiting container and restart it, or create a new container if it does not exist, and run the container with the correct parameters.