产品介绍
产品组成
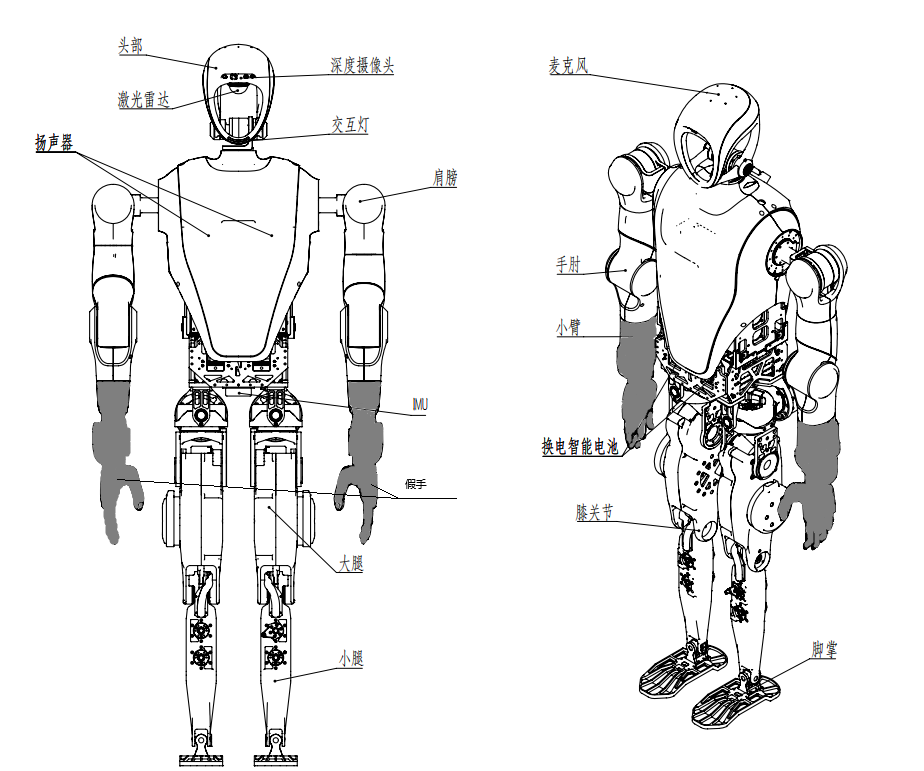
KUAVO机器人4pro 标准版包含躯干、手臂、腿部,全身总共22个自由度(不含末端),使得机器人能够实现灵活的运动和姿态控制。
深度相机、激光雷达、麦克风阵列、交互灯等位于头部。
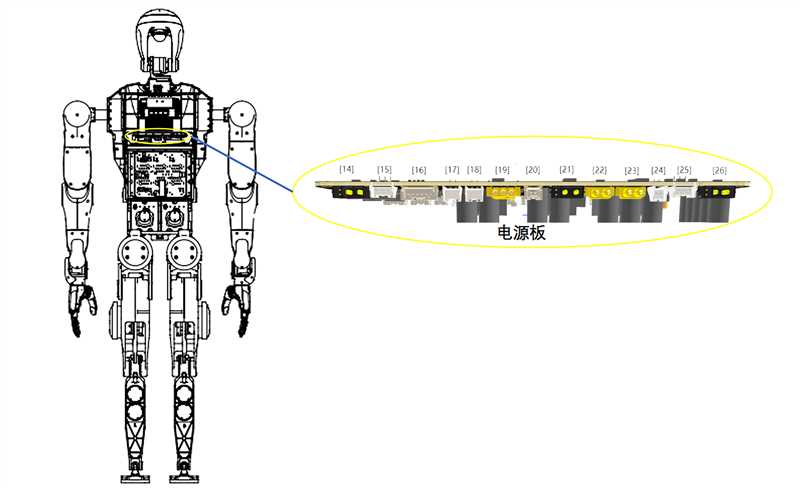
躯干内包含:运动控制板、电源板及换电电池。
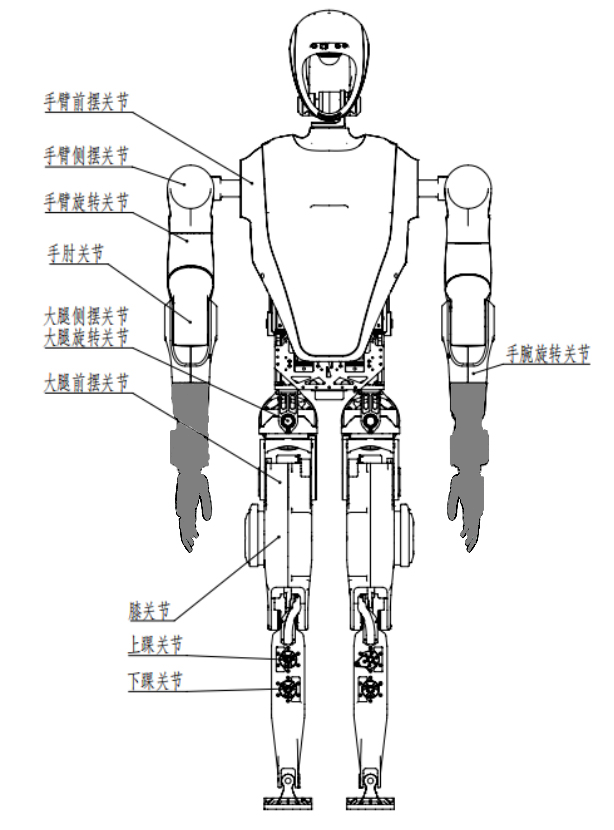
单手臂拥有5个自由度,包含手臂前摆关节、手臂侧摆关节、手臂旋转关节、手肘关节、手腕旋转关节。
单腿拥有6个自由度,包含大腿侧摆关节、大腿旋转关节、大腿前摆关节、膝关节、上踝关节和下踝关节。
产品规格
| 类型 | 规格参数 | 指标说明 |
|---|---|---|
| 基本参数 | 高 重量 单臂长度 | 1.66m 55kg 0.79m |
| 自由度 | 全身自由度(不含末端) 单臂自由度 单腿自由度 | 22 5 6 |
| 运行参数 | 行走速度 跑步速度 | 0.4m/s 5km/h |
| 电池参数 | 工作电压 行走续航 电池容量 循环寿命 充电时长 | 60V 1h 6Ah ≥500次 ≤1.5h |
| 传感器 | 摄像头 麦克风 激光雷达 扬声器 关节温度传感器 IMU | Gemini 335L 6MIC 360度定位 mid-360 立体音响 LB01 / |
| 算力平台 | 下位机 上位机 | 摩方i913900 x 1 ORIN_NX x 1 |
| 安全功能 | 本体急停 声音提醒 | 1 低电量提醒 |
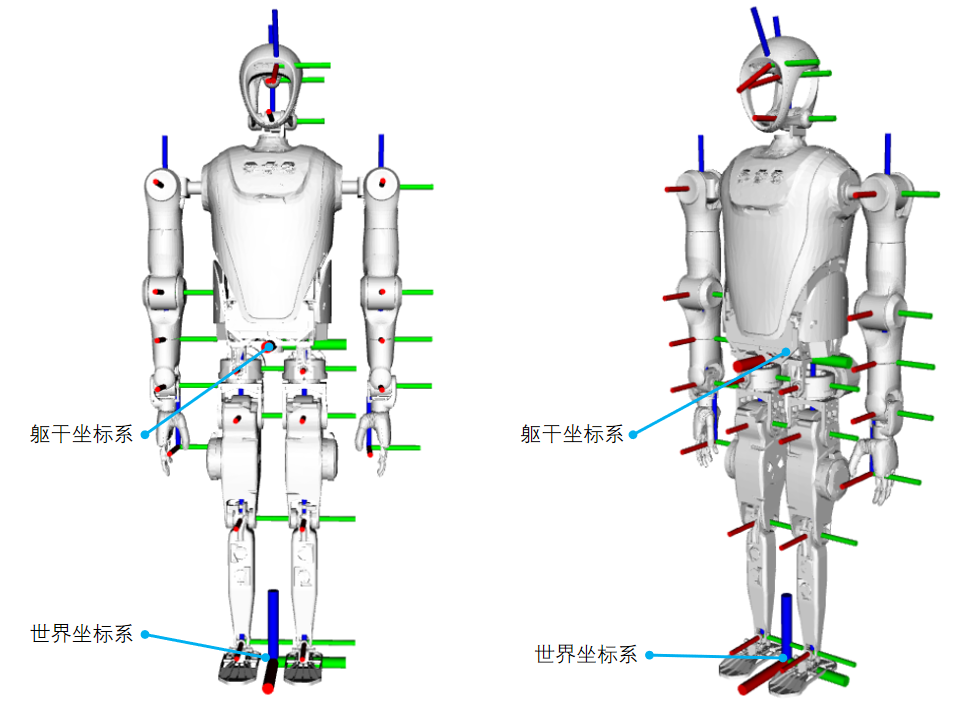
KUAVO_4pro标准版自由度范围、速度扭矩限制关节位置及运动控制坐标系图示
| 关节序号 | 关节名称 | 关节代号 | 位置下限(°) | 位置上限(°) | 额定力矩(Nm) | 额定速度(rpm) |
|---|---|---|---|---|---|---|
| 0 | 左肩前摆 | l_arm_pitch | -180 | 90 | 20 | 120 |
| 1 | 左肩侧摆 | l_arm_roll | -20 | 120 | 22 | 30 |
| 2 | 左臂旋转 | l_arm_yaw | -90 | 90 | 12 | 50 |
| 3 | 左肘 | l_forearm | -150 | 0 | 22 | 30 |
| 4 | 左腕旋转 | l_hand_yaw | -90 | 90 | 6 | 50 |
| 5 | 右肩前摆 | r_arm_pitch | -180 | 90 | 20 | 120 |
| 6 | 右肩侧摆 | r_arm_roll | -120 | 20 | 22 | 30 |
| 7 | 右臂旋转 | r_arm_yaw | -90 | 90 | 12 | 50 |
| 8 | 右肘 | r_forearm | -150 | 0 | 22 | 30 |
| 9 | 右腕旋转 | r_hand_yaw | -90 | 90 | 6 | 50 |
| 10 | 左髋侧摆 | l_leg_roll | -18 | 38 | 40 | 120 |
| 11 | 左髋旋转 | l_leg_yaw | -50 | 45 | 20 | 120 |
| 12 | 左髋前摆 | l_leg_pitch | -115 | 90 | 20 | 120 |
| 13 | 左膝 | l_knee | 0 | 145 | 40 | 120 |
| 14 | 左踝上 | l_foot_pitch | -45 | 20 | 12 | 77 |
| 15 | 左踝下 | l_foot_roll | -15 | 15 | 12 | 77 |
| 16 | 右髋侧摆 | r_leg_roll | -38 | 18 | 40 | 120 |
| 17 | 右髋旋转 | r_leg_yaw | -45 | 50 | 20 | 120 |
| 18 | 右髋前摆 | r_leg_pitch | -115 | 90 | 20 | 120 |
| 19 | 右膝 | r_knee | 0 | 145 | 40 | 120 |
| 20 | 右踝上 | r_foot_pitch | -45 | 20 | 12 | 77 |
| 21 | 右踝下 | r_foot_roll | -15 | 15 | 12 | 77 |
KUAVO_4pro标准版电气接口
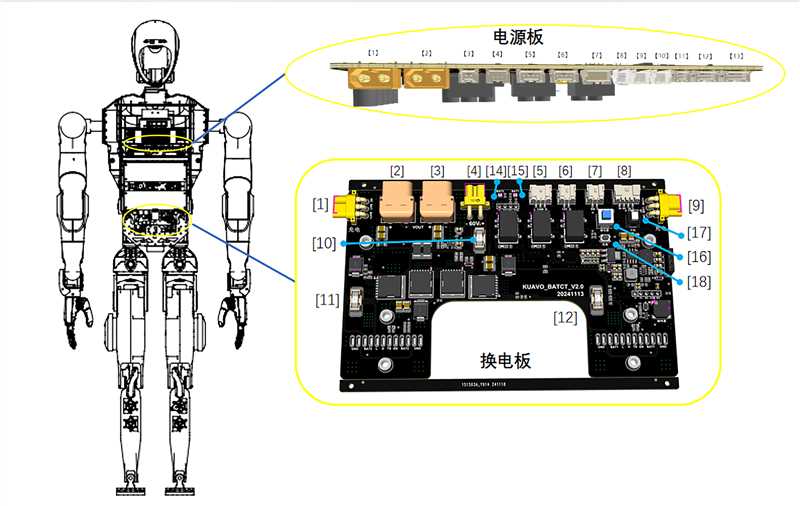
换电板接口说明:
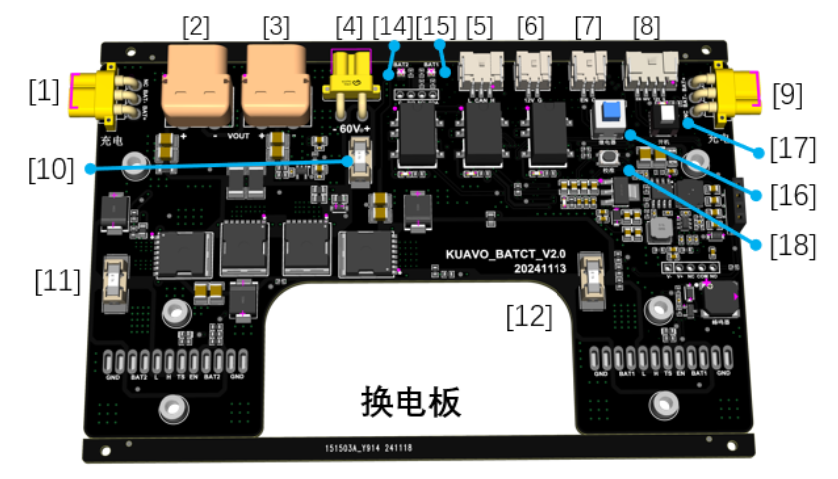
| 序号 | 接口型号 | 接口名称 | 说明 |
|---|---|---|---|
| 1 | MR30PW-F | 左充电接口 | 外接67.2V/5A锂电池专用充电器给左侧电池充电 |
| 2 | XT60PW-F | 60V放电接口 | 输出电压48V~67.2V,输出电流40A |
| 3 | XT60PW-F | 60V放电接口 | 输出电压48V~67.2V,输出电流40A |
| 4 | XT30PW-F | 电源板接口 | 输出电压48V~67.2V,输出电流15A |
| 5 | 3PIN,2mm连接器 PAP-03V-S | CAN通信 | 电池CAN通信接口 |
| 6 | 2PIN,2mm连接器 PAP-02V-S | 12V接口 | 输出电压12V,0.5A |
| 7 | 2PIN,2mm连接器 PAP-02V-S | 外接驱动器电源开关 | 控制驱动器60V放电接口输出开关 |
| 8 | 4PIN,2mm连接器 PAP-04V-S | 外接开机开关 | 外接开机按钮接口,开机后电源板和NUC供电打开,蜂鸣器响一声; |
| 9 | MR30PW-F | 右充电接口 | 外接67.2V/5A锂电池专用充电器给右侧电池充电 |
| 10 | 6125保险丝30A | 保险丝 | 左/右侧电池输出保险丝,型号:6125,125V,30A |
| 11 | 6125保险丝30A | 保险丝 | 左/右侧电池输出保险丝,型号:6125,125V,30A |
| 12 | 6125保险丝15A | 保险丝 | 电源板输出保险丝,型号:6125,125V,15A |
| 14 | 红绿双色LED灯 | 左电池指示灯 | 左/右侧电池状态指示灯,正常:绿灯闪烁;电量低或电池拔出:红灯闪烁,蜂鸣器间断响;过温保护:红灯和蜂鸣器同步间隔1秒闪烁/响起;过流保护:红灯常亮,蜂鸣器长鸣; |
| 15 | 红绿双色LED灯 | 右电池指示灯 | 左/右侧电池状态指示灯,正常:绿灯闪烁;电量低或电池拔出:红灯闪烁,蜂鸣器间断响;过温保护:红灯和蜂鸣器同步间隔1秒闪烁/响起;过流保护:红灯常亮,蜂鸣器长鸣; |
| 16 | 蓝色自锁开关 | 板载驱动器电源开关 | 板载控制驱动器60V放电接口输出开关 |
| 17 | 白色自锁开关 | 板载开机开关 | 板载开机开关,开机后电源板和NUC供电打开,蜂鸣器响一声; |
| 18 | 轻触开关 | 校准开关 | 该开关有两种工作状态: 校准电压采集:机器接入一个电池,按住校准开关,按下开机开关,等待2秒,校准PCB电压采样; 短路保护复位:过流保护状态下,长按2秒复位过流保护状态; |
电源板接口说明:
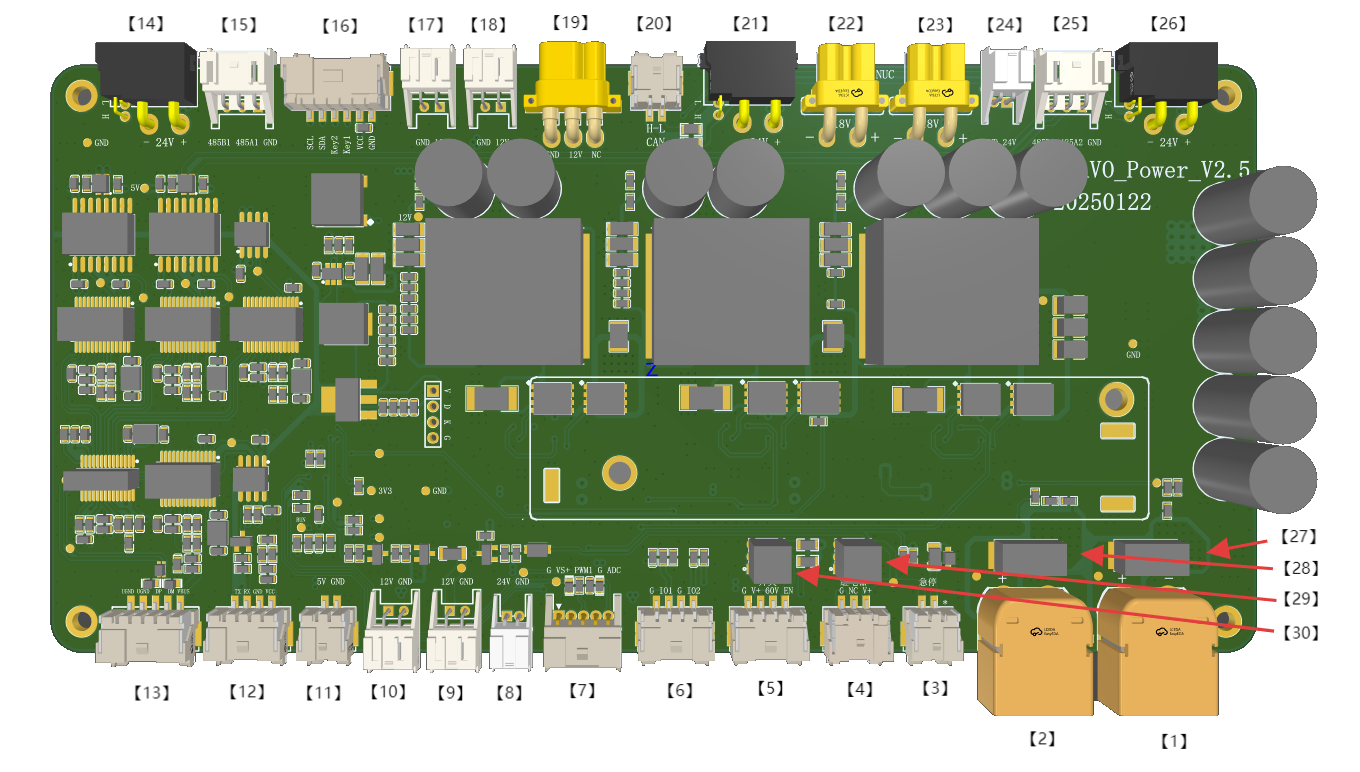
| 序号 | 接口型号 | 接口名称 | 说明 |
|---|---|---|---|
| 1 | XT60PW-M | 电源输入 | 输入电压范围36V~80V DC |
| 2 | XT60PW-M | 电源输入 | 输入电压范围36V~80V DC |
| 3 | 2PIN,2.0MM连接器 PAP-02V-S | NG | |
| 4 | 3PIN,2.0MM连接器 PAP-03V-S | 驱动器电源反馈 | 驱动器电源信号反馈 |
| 5 | 4PIN,2.0MM连接器 PAP-04V-S | NG | |
| 6 | 4PIN,2.0MM连接器 PAP-04V-S | 预留输入 | |
| 7 | 5PIN,2.0MM连接器 PAP-05V-S | 散热风扇 | 驱动器散热风扇接口,24V/1A输出 |
| 8 | 2PIN,2.0MM连接器 RAP-02V-1 | 24V输出 | 24V/1A电源输出 |
| 9 | 2PIN,2.54MM连接器 XAP-02V-1 | 12V输出 | 12V/1A电源输出 |
| 10 | 2PIN,2.54MM连接器 XAP-02V-1 | 12V输出 | 12V/1A电源输出 |
| 11 | 2PIN,2.54MM连接器 XAP-02V-1 | 5V输出 | 5V/1A电源输出 |
| 12 | 4PIN,2.0MM连接器 PAP-04V-S | SBUS通信 | 无线遥控接收模块通信接口 |
| 13 | 5PIN,2.0MM连接器 PAP-05V-S | USB通信输入 | 电源板UBS接口,接到运动控制NUC |
| 14 | XT30(2+2)PW-M | 左手臂接口 | 左手电机24V电源与CAN通信 |
| 15 | 3PIN,2.54MM连接器 XAP-03V-1 | 灵巧手RS485 | 左手为灵巧手时,485通讯线接口 |
| 16 | 6PIN,2.0MM连接器 PAP-06V-S | 电量指示 | 电池电量指示板接口 |
| 17 | 2PIN,2.54MM连接器 XAP-02V-1 | 12V输出 | 12V/1A电源输出 |
| 18 | 2PIN,2.54MM连接器 XAP-02V-1 | 12V输出 | 12V/1A电源输出 |
| 19 | MR30PW-F | 12V输出 | 12V/10A电源输出与LIN通信 |
| 20 | 2PIN,2.0MM连接器 PAP-02V-S | CAN通信输入 | 外接USB转CAN模块 |
| 21 | XT30(2+2)PW-M | 脖子电机接口 | 脖子电机24V电源与CAN通信 |
| 22 | XT30PW-F | NUC电源输出 | 18V/6A电源输出 |
| 23 | XT30PW-F | NUC电源输出 | 18V/6A电源输出 |
| 24 | 2PIN,2.0MM连接器 RAP-02V-1 | 24V输出 | 24V/1A电源输出 |
| 25 | 3PIN,2.54MM连接器 XAP-03V-1 | 灵巧手RS485 | 右手为灵巧手时,485通讯线接口 |
| 26 | XT30(2+2)PW-M | 右手臂接口 | 右手电机24V电源与CAN通信 |
| 27 | 6125保险丝15A | 左侧电源保险丝 | 电源板左侧电池输入保险丝,型号:6125,125V/15A |
| 28 | 6125保险丝15A | 右侧电源保险丝 | 电源板右侧电池输入保险丝,型号:6125,125V/15A |
| 29 | 自锁开关 | NG | |
| 30 | 自锁开关 | 开机开关 | 板载开机开关,开机后电源板和NUC供电打开,按钮默认按下; |
传感器参数
IMU
纵倾横滚精度:0.2度;
方位角精度:0.2度;
陀螺仪:
满量程:2000度/秒;
零偏稳定性:2.5°/h;
加速度传感器:
满量程:12g;
零偏稳定性:30 μg;
机械性能:
- 工作温度 -40 到 85 摄氏度;
接口 / IO:
- 加速度输出频率 1000 HZ。
深度摄像头:Gemini-335L
深度技术:双目视觉;
图像传感器技术:全局快门;
深度基线:95mm;
最大工作范围:0.17~20m+;
理想范围:0.25~6m;
深度空间相对精度:≤0.8%(1280x800 @ 2m & 90%x90% ROI)
≤1.6%(1280 x800 @ 4m & 80% x 80% ROI);深度FOV:90° × 65° @ 2m(1280 × 800);
深度分辨率@帧率:1280 × 800 @ 30fps;
RGB帧速率和分辨率:60fps下1280 × 800;
RGB传感器FOV:94° × 68°;
RGB图像格式:YUYV & MJPEG;
连接器:USB 3.0 & USB 2.0 Type-C;
工作温度:-10~50℃;
IP等级:IP65;
使用环境:室外;
支持物体识别、定位和追踪;
激光雷达:mid-360
扫描模式:非重复扫描;
量程(@100klx):40m@10%反射率,70m@80%反射率;
近处盲区:0.1m;
视场角(H X V):360° X 59°;
测距随机误差(@1δ):≤2cm(@10m),≤3cm(@0.2m);
角度随机误差(@1δ):<0.15°;
光束发散度:典型值:0.1° x 1°;
点云输出:~200,000点/秒;
点云帧率:10Hz;
数据网口:100BASE-TX以太网;
供电电压范围:9~27V DC;
功率:额定功率≤6.5W,启动功率≤18W;
工作温度:-20℃~55℃;
防护级别:IP67;
IMU:ICM40609;
下位机:摩方i9-13900
CPU:英特尔 酷睿 i9-13900H;
GPU:Iris Xe Graphics;
内存:64G DDR5内存;
硬盘容量:500G固态;
主频:14核20线程 睿频5.4GHz;
网络:双频WiFi6E/蓝牙5.2(AX211)+双2.5G网口(intel i255);
上位机:
ORIN-NX
CPU:6 核 Arm Cortex-A78AE v8.2 64 位 CPU 2MB L2 + 4MB L3;
GPU:NVIDIA Ampere architecture 1024 CUDA Cores 32 Tensor Cores;
内存:8G;
硬盘容量:256G;
主频:2.0GHz;
网络:1x GbE。