产品介绍
产品组成
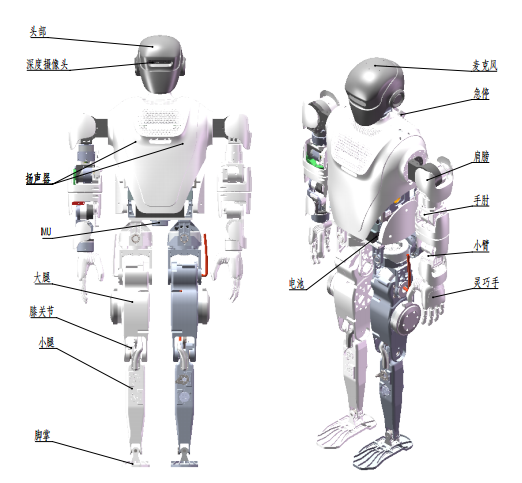
KUAVO机器人4.1包含头、躯干、手臂、腿部,全身总共28个自由度(不含末端),使得机器人能够实现灵活的运动和姿态控制
头部拥有2个自由度,包含头部旋转关节和头部俯仰关节。深度相机、麦克风阵列、上位机等位于头部。
躯干内包含:下位机、运动控制板、电源板及电池 。
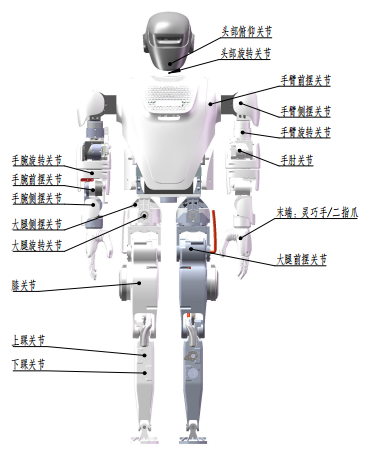
单手臂拥有7个自由度,包含手臂前摆关节、手臂侧摆关节、手臂旋转关节、手肘关节、手腕旋转关节、手腕前摆关节和手腕侧摆关节。手臂可选配末端二指爪/灵巧手
单腿拥有6个自由度,包含大腿侧摆关节、大腿旋转关节、大腿前摆关节、膝关节、上踝关节和下踝关节
产品规格
| 类型 | 规格参数 | 指标说明 |
|---|---|---|
| 基本参数 | 高 重量 单臂长度 | 1.55m 50kg 626mm |
| 自由度 | 全身自由度(不含末端) 头部自由度 单臂自由度 单腿自由度 二指爪自由度(标配) 灵巧手自由度(选配) | 30 2 7 6 1 6 |
| 运行参数 | 行走速度 | 0.4m/s |
| 电池参数 | 工作电压 行走续航 电池容量 循环寿命 充电时长 | 60V 1.5h 8Ah ≥500次 ≤1.5h |
| 传感器 | 摄像头 麦克风 扬声器 关节温度传感器 IMU | D435 6MIC 360度定位 立体音响 LB01 / |
| 算力平台 | 下位机 上位机 | 摩方i913900 SWNUC12WSKI70000(标配) AGX Orin(选配) |
| 安全功能 | 本体急停 声音提醒 | 1 低电量提醒 |
自由度范围、速度扭矩限制关节位置及运动控制坐标系图示
| 关节序号 | 关节名称 | 关节代号 | 位置下限(°) | 位置上限(°) | 额定力矩(Nm) | 额定速度(rpm) |
|---|---|---|---|---|---|---|
| 0 | 头部俯仰 | head_pitch | -30 | 30 | 2 | 50 |
| 1 | 头部旋转 | head_yaw | -90 | 90 | 0.5 | 50 |
| 2 | 左肩前摆 | l_arm_pitch | -150 | 30 | 20 | 50 |
| 3 | 左肩侧摆 | l_arm_roll | -20 | 120 | 22 | 50 |
| 4 | 左臂旋转 | l_arm_yaw | -90 | 90 | 10 | 50 |
| 5 | 左肘 | l_forearm | 0 | 90 | 10 | 50 |
| 6 | 左腕旋转 | l_hand_yaw | -90 | 90 | 2 | 50 |
| 7 | 左腕前摆 | l_hand_pitch | -90 | 90 | 2 | 50 |
| 8 | 左腕侧摆 | l_hand_roll | -90 | 90 | 2 | 50 |
| 9 | 右肩前摆 | r_arm_pitch | -150 | 30 | 20 | 50 |
| 10 | 右肩侧摆 | r_arm_roll | -120 | 20 | 22 | 50 |
| 11 | 右臂旋转 | r_arm_yaw | -90 | 90 | 10 | 50 |
| 12 | 右肘 | r_forearm | 0 | 90 | 10 | 50 |
| 13 | 右腕旋转 | r_hand_yaw | -90 | 90 | 2 | 50 |
| 14 | 右腕前摆 | r_hand_pitch | -90 | 90 | 2 | 50 |
| 15 | 右腕侧摆 | r_hand_roll | -90 | 90 | 2 | 50 |
| 16 | 左髋侧摆 | l_leg_roll | -18 | 38 | 40 | 120 |
| 17 | 左髋旋转 | l_leg_yaw | -50 | 45 | 20 | 120 |
| 18 | 左髋前摆 | l_leg_pitch | -115 | 90 | 20 | 120 |
| 19 | 左膝 | l_knee | 0 | 145 | 40 | 120 |
| 20 | 左踝上 | l_foot_pitch | -45 | 20 | 12 | 77 |
| 21 | 左踝下 | l_foot_roll | -15 | 15 | 12 | 77 |
| 22 | 右髋侧摆 | r_leg_roll | -38 | 18 | 40 | 120 |
| 23 | 右髋旋转 | r_leg_yaw | -45 | 50 | 20 | 120 |
| 24 | 右髋前摆 | r_leg_pitch | -115 | 90 | 20 | 120 |
| 25 | 右膝 | r_knee | 0 | 145 | 40 | 120 |
| 26 | 右踝上 | r_foot_pitch | -45 | 20 | 12 | 77 |
| 27 | 右踝下 | r_foot_roll | -15 | 15 | 12 | 77 |
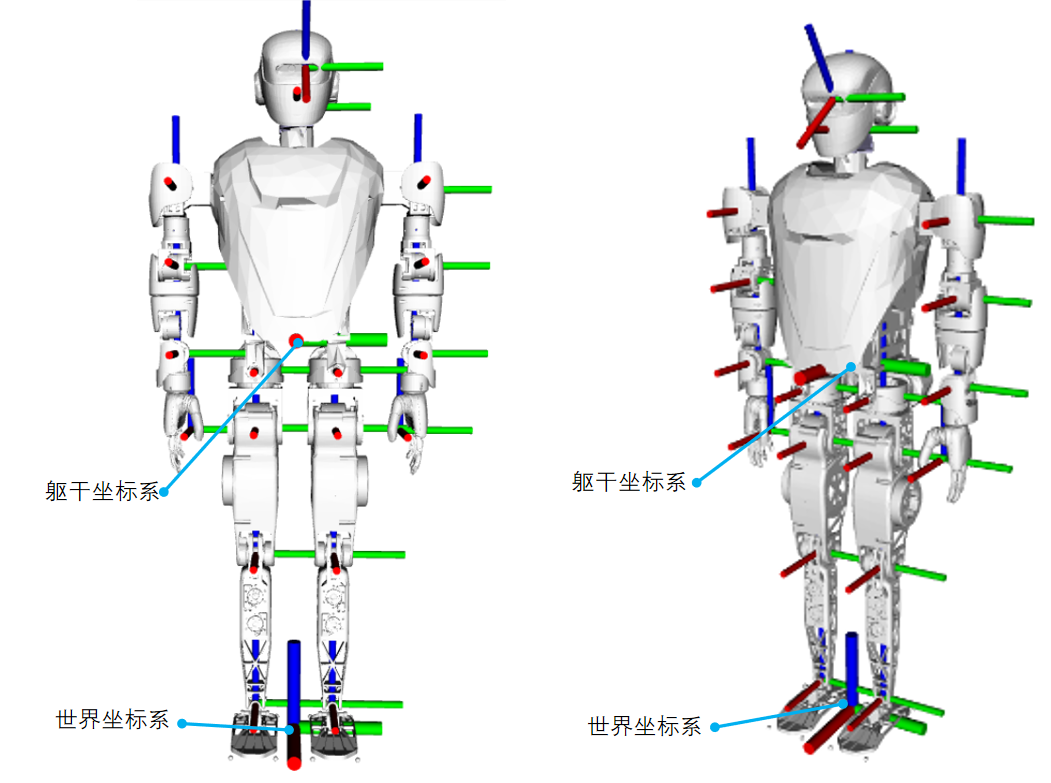
当各个关节均为零度时,各坐标系如上图。红色为x轴,绿色为y轴,蓝色为z轴。
电气接口
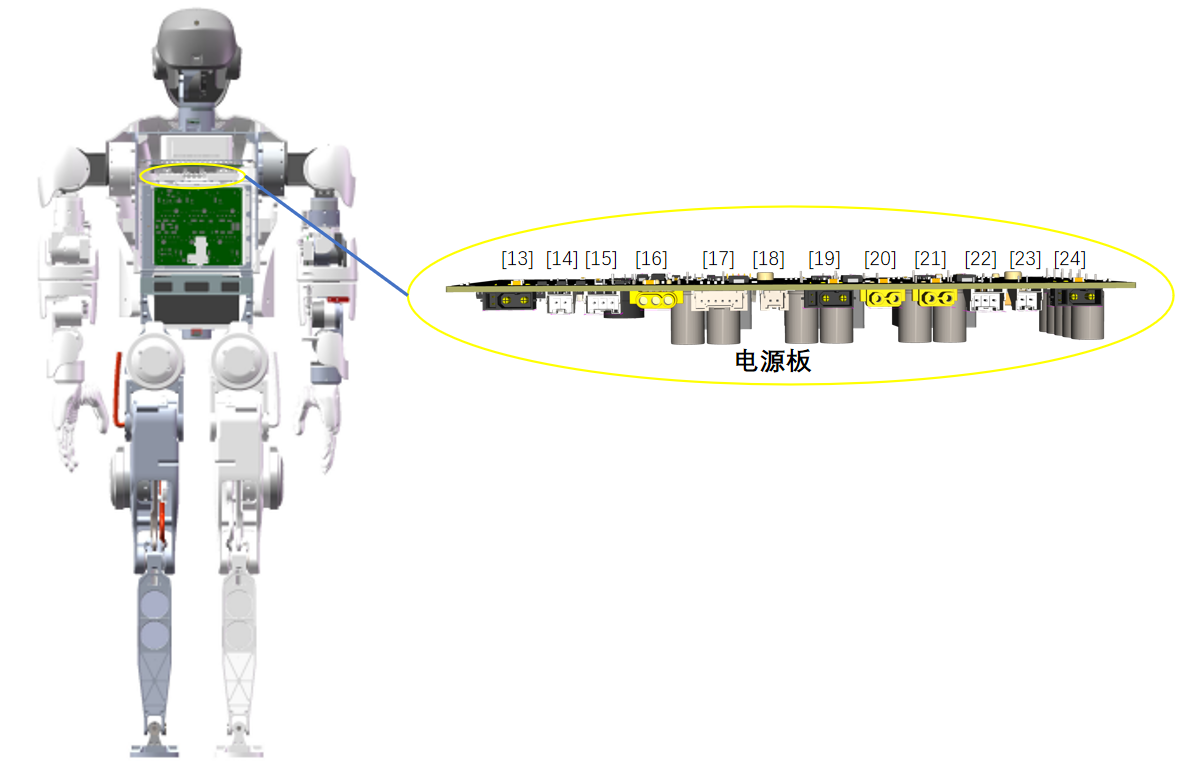
电源板接口说明
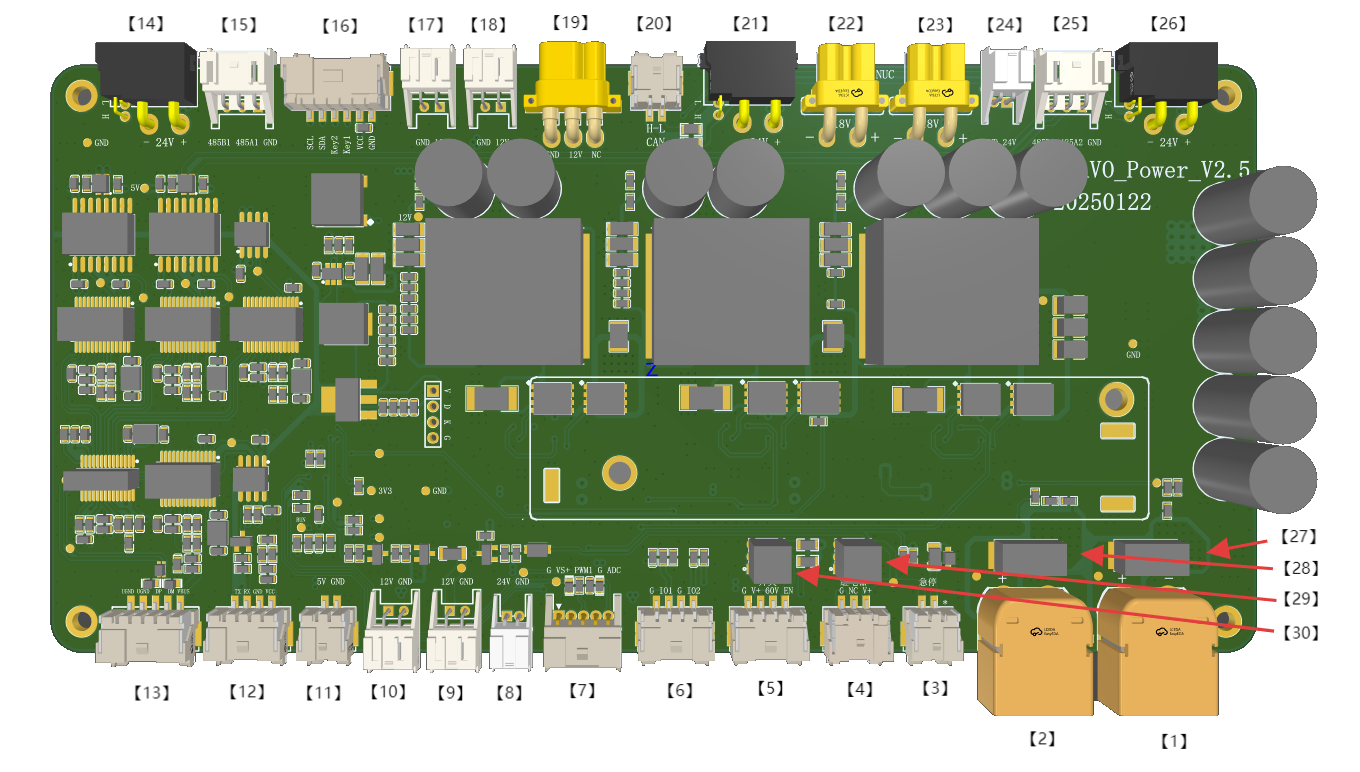
| 序号 | 接口型号 | 接口名称 | 说明 |
|---|---|---|---|
| 1 | XT60PW-M | 电源输入 | 输入电压范围36V~80V DC |
| 2 | XT60PW-M | 电源输入 | 输入电压范围36V~80V DC |
| 3 | 2PIN,2.0MM连接器 PAP-02V-S | 驱动器电源控制开关 | 驱动器电源控制开关,外接急停开关 |
| 4 | 3PIN,2.0MM连接器 PAP-03V-S | 外接固态继电器 | 固态继电器控制线,12V电平输出 |
| 5 | 4PIN,2.0MM连接器 PAP-04V-S | NG外接开机按钮 | 外接开机按钮接口,开机后电源板和NUC供电打开,蜂鸣器响一声; |
| 6 | 4PIN,2.0MM连接器 PAP-04V-S | 预留输入 | |
| 7 | 5PIN,2.0MM连接器 PAP-05V-S | 散热风扇 | 驱动器散热风扇接口,24V/1A输出 |
| 8 | 2PIN,2.54MM连接器 XAP-02V-1 | 12V输出 | 12V/1A电源输出 |
| 9 | 2PIN,2.54MM连接器 XAP-02V-1 | 12V输出 | 12V/1A电源输出 |
| 10 | 2PIN,2.54MM连接器 XAP-02V-1 | 5V输出 | 5V/1A电源输出 |
| 11 | 4PIN,2.0MM连接器 PAP-04V-S | SBUS通信 | 无线遥控接收模块通信接口 |
| 12 | 5PIN,2.0MM连接器 PAP-05V-S | USB通信输入 | 电源板UBS接口,接到运动控制NUC |
| 13 | XT30(2+2)PW-M | 左手臂接口 | 左手电机24V电源与CAN通信 |
| 14 | 2PIN,2.54MM连接器 XAP-02V-1 | 夹爪RS485 | 左手为钧舵夹爪时,485通讯线接口 |
| 15 | 3PIN,2.54MM连接器 XAP-03V-1 | 灵巧手RS485 | 左手为灵巧手时,485通讯线接口 |
| 16 | MR30PW-F | 12V输出 | 12V/10A电源输出与LIN通信 |
| 17 | 6PIN,2.0MM连接器 PAP-06V-S | 电量指示 | 电池电量指示板接口 |
| 18 | 2PIN,2.0MM连接器 PAP-02V-S | CAN通信输入 | 外接USB转CAN模块 |
| 19 | XT30(2+2)PW-M | 脖子电机接口 | 脖子电机24V电源与CAN通信 |
| 20 | XT30PW-F | NUC电源输出 | 18V/6A电源输出 |
| 21 | XT30PW-F | NUC电源输出 | 18V/6A电源输出 |
| 22 | 3PIN,2.54MM连接器 XAP-03V-1 | 灵巧手RS485 | 右手为灵巧手时,485通讯线接口 |
| 23 | 2PIN,2.54MM连接器 XAP-02V-1 | 夹爪RS485 | 右手为钧舵夹爪时,485通讯线接口 |
| 24 | XT30(2+2)PW-M | 右手臂接口 | 右手电机24V电源与CAN通信 |
| 25 | 6125保险丝15A | 左侧电源保险丝 | 电源板左侧电池输入保险丝,型号:6125,125V/15A |
| 26 | 6125保险丝15A | 右侧电源保险丝 | 电源板右侧电池输入保险丝,型号:6125,125V/15A |
| 27 | 自锁开关 | 开机开关 | 板载开机开关,开机后电源板和NUC供电打开,蜂鸣器响一声;与外接开机按钮并联;按钮默认弹起; |
| 28 | 自锁开关 | 固态继电器控制开关 | 板载固态继电器控制开关,该开关控制驱动器电源,与外接急停开关并联;按钮默认弹起; |
传感器参数
IMU
纵倾横滚精度:0.2度;
方位角精度:1度;
陀螺仪:
满量程:2000度/秒;
零偏稳定性:8°/h;
带宽:520Hz;
噪声密度:0.007 º/s/√Hz。
加速度传感器:
满量程:10g;
零偏稳定性:10(x,y)15(z) μg;
带宽:500Hz;
噪声密度:60 μg/√Hz
深度摄像头:D435
深度技术:双目红外;
图像传感器技术:全局快门;
深度视场角(水平 X 垂直):87° X 58°;
深度分辨率:1280 X 720;
深度精度:2米内<2%;
景深速率:90fps;
RGB传感器技术:卷帘门;
RGB传感器分辨率:2MP;
RGB帧速率和分辨率:30fps下1920 X 1080;
RGB传感器FOV(H X V):69° X 42°;
惯性测量单位:无;
高分辨率时的min深度距离:0.2m;
理想范围:0.3~3m;
连接器:USB 3.1 Gen 1;
使用环境:室外;
支持物体识别、定位和追踪;
下位机:摩方i9-13900
CPU:英特尔 酷睿 i9-13900H;
GPU:Iris Xe Graphics;
内存:64G DDR5内存;
硬盘容量:500G固态;
主频:14核20线程 睿频5.4GHz;
网络:双频WiFi6E/蓝牙5.2(AX211)+双2.5G网口(intel i255);
上位机:
SWNUC12WSKI70000
CPU:Intel Core i7-12700K
GPU:Intel Iris Xe Graphics
内存:32G
硬盘容量:256G
主频:12核20线程 睿频5.0GHz
网络:Wi-Fi 6E和蓝牙 5.2+2.5G网口
AGX Orin(选配)
- CPU:
- 架构: Arm® Cortex®-A78AE
- 核心数: 12 核(64GB 版本),8 核(32GB 版本)
- 缓存: 3MB L2 + 6MB L3(64GB 版本),2MB L2 + 4MB L3(32GB 版本)
- 最大频率: 可达 2.2 GHz
- GPU:
- 架构: NVIDIA Ampere
- 核心数: 2048 CUDA 核心(64GB 版本),1792 CUDA 核心(32GB 版本)
- Tensor 核心: 64 个(64GB 版本),56 个(32GB 版本)
- 最大频率: 最高可达 1.3 GHz
- 内存:
- 类型: LPDDR5
- 容量: 可选 32GB 或 64GB
- 带宽: 204.8 GB/s
- 硬盘容量:
- 类型: eMMC 5.1
- 容量: 64GB
- 主频:
- CPU 最大频率为可达 2.2 GHz。
- 网络:
- 支持多种网络连接,包括1个千兆以太网口和1个10GbE接口。
- AI性能:
- 性能指标: 可达275 TOPS(每秒万亿次操作) Jetson AGX Orin 提供了显著的性能提升,特别是在 AI 推理和深度学习任务中,相较于其前代产品 Jetson AGX Xavier,性能提升可达8倍。该平台非常适合需要实时处理和高计算能力的应用,如自动驾驶、智能城市和医疗保健等领域
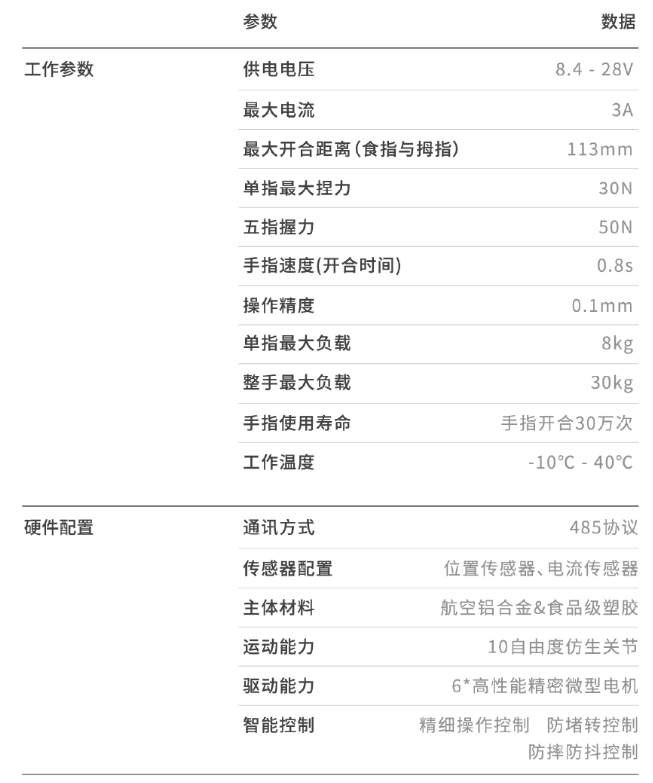
二指爪(标配)
| 规格 | 参数指标 |
|---|---|
| 重量 | 600g |
| 尺寸 | 闭合尺寸:187mm x 104mm 张开尺寸:145mm x 214mm |
| 夹持力 | 180N |
| 行程 | 22.5cm |
| 工作电压 | 24V~60V |
| 通讯协议 | CAN |
| 产品特点 | 自适应夹持 夹持力自锁 柔性指尖 |

灵巧手(选配)

灵巧手产品说明手册:app.brainco.cn/universal/stark-serialport-prebuild/docs/BC4-0100114095_20240521.pdf
灵巧手官方文档网站:灵巧手官方文档网站