仿真环境使用
仿真环境部署
在没有机器人运行环境的情况下,可以使用docker环境进行编译和仿真使用。
- docker镜像可以自行根据后续章节使用
./docker/Dockerfile构建,或者下载已经编译好的镜像:
容器下载链接:https://kuavo.lejurobot.com/docker_images/kuavo_opensource_ocs2_mpc_wbc_img_0_3.tar
- 执行以下命令导入容器镜像:
docker load -i kuavo_opensource_ocs2_mpc_wbc_img_0_3.tar
- 修改
docker/run.sh文件中的容器名称:
# 12行
IMAGE_NAME=$(docker images kuavo_opensource_mpc_wbc_img --format "{{.Repository}}:{{.Tag}}" | sort -V | tail -n1)
- 执行
./docker/run.sh进入容器后,默认在仓库的映射目录/root/kuavo_ws - 修改
~/.zshrc
export ROBOT_VERSION=42 # 4pro版本
- source生效
source ~/.zshrc
- 执行以下命令开始编译:
rm -r devel/ build/
catkin config -DCMAKE_ASM_COMPILER=/usr/bin/as -DCMAKE_BUILD_TYPE=Release # Important!
# -DCMAKE_ASM_COMPILER=/usr/bin/as 为配置了ccache必要操作,否则可能出现找不到编译器的情况
source installed/setup.zsh # 加载一些已经安装的ROS包依赖环境,包括硬件包等
catkin build humanoid_controllers #会编译所有依赖项
如果失败,执行
rm -r devel/ build/
再重新进行编译
Note:如果没有安装pinocchio,则需要先安装:
sudo apt install ros-noetic-pinocchio -y
运行
source devel/setup.zsh
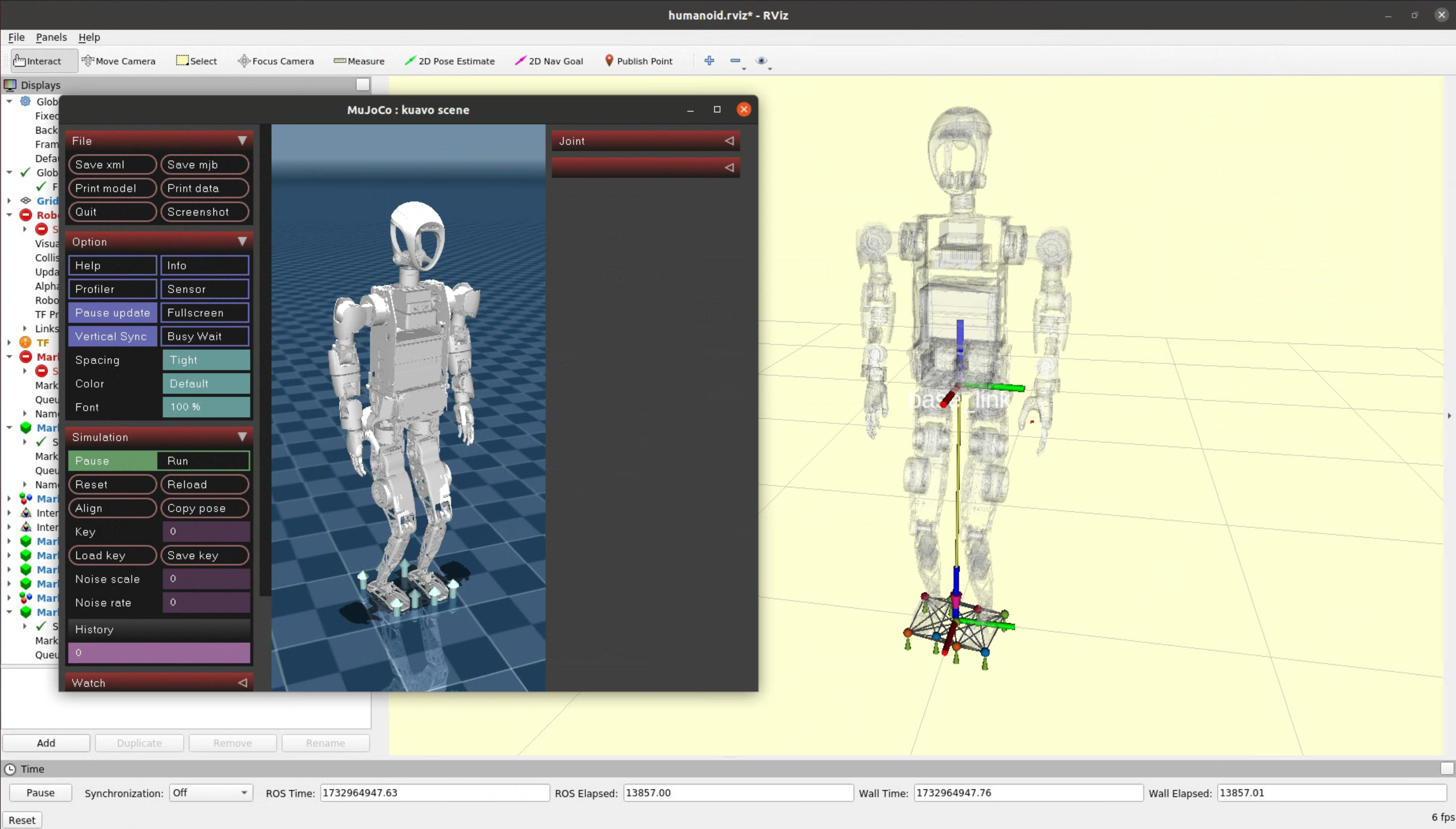
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch # 启动控制器、mpc、wbc、mujoco仿真器