启动前准备
硬件检查清单
1.NUC镜像烧录完成
2.电机安装完成
3.上下位机拓展口正常
4.轮臂底盘上的按键均能使用
相关配置
1.配置机器人版本、下位机仓库
1、电脑连接下位机,新建终端,根据当前最新配置来修改机器人版本(此处以ROBOT_VERSION=60为例):
sudo sh -c "echo 'export ROBOT_VERSION=60' >> /root/.bashrc"
sudo sh -c "echo 'export ROBOT_VERSION=60' >> /home/lab/.bashrc"
2、切换分支:
cd kuavo-ros-opensource
git reset --hard
git clean -fd
git pull
git checkout opensource/wyx/lb/factory_test_version60
3、分支切换后,在仓库里执行编译仓库:
sudo su
catkin clean -y
catkin config -DCMAKE_asm_COMPILER=/usr/bin/as -DCMAKE _Builds_TYPE=Release
source installed/setup.bash
catkin build humanoid_Controllers
2.上位机固定IP
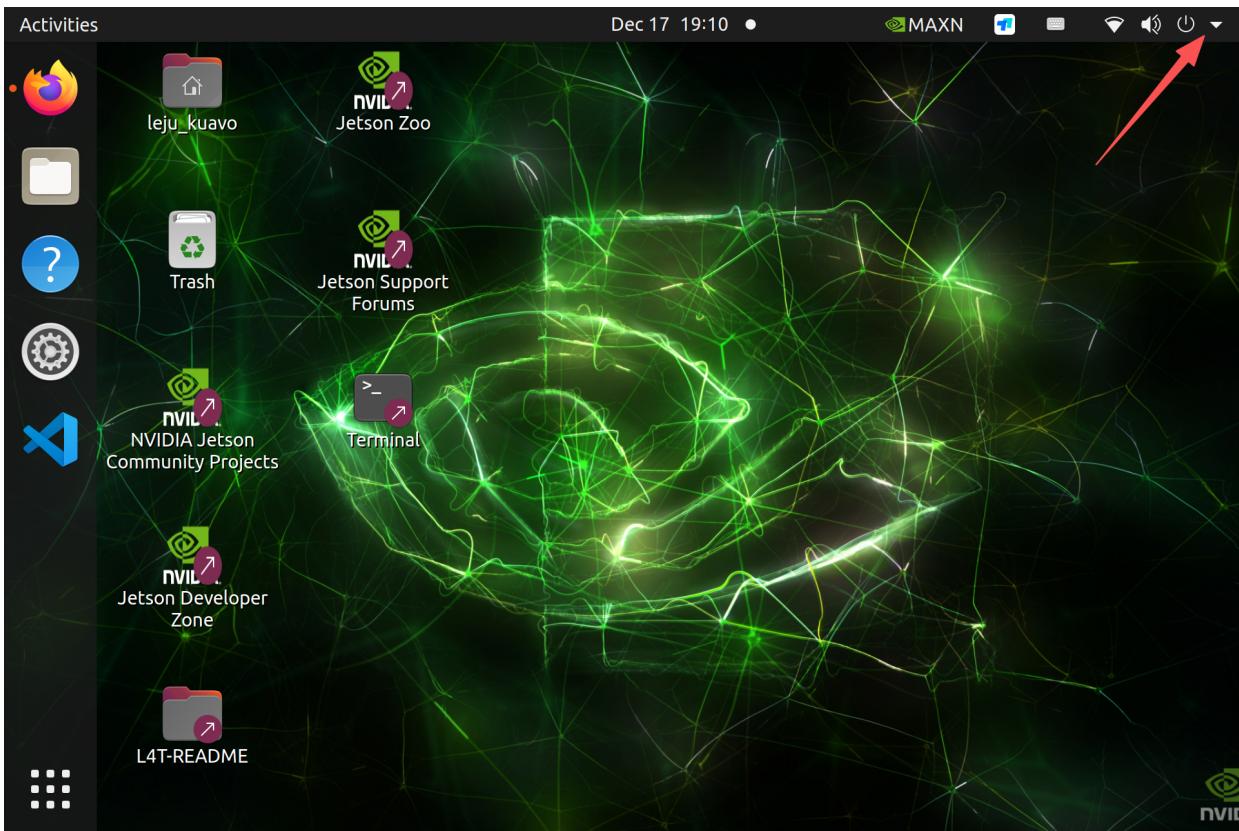
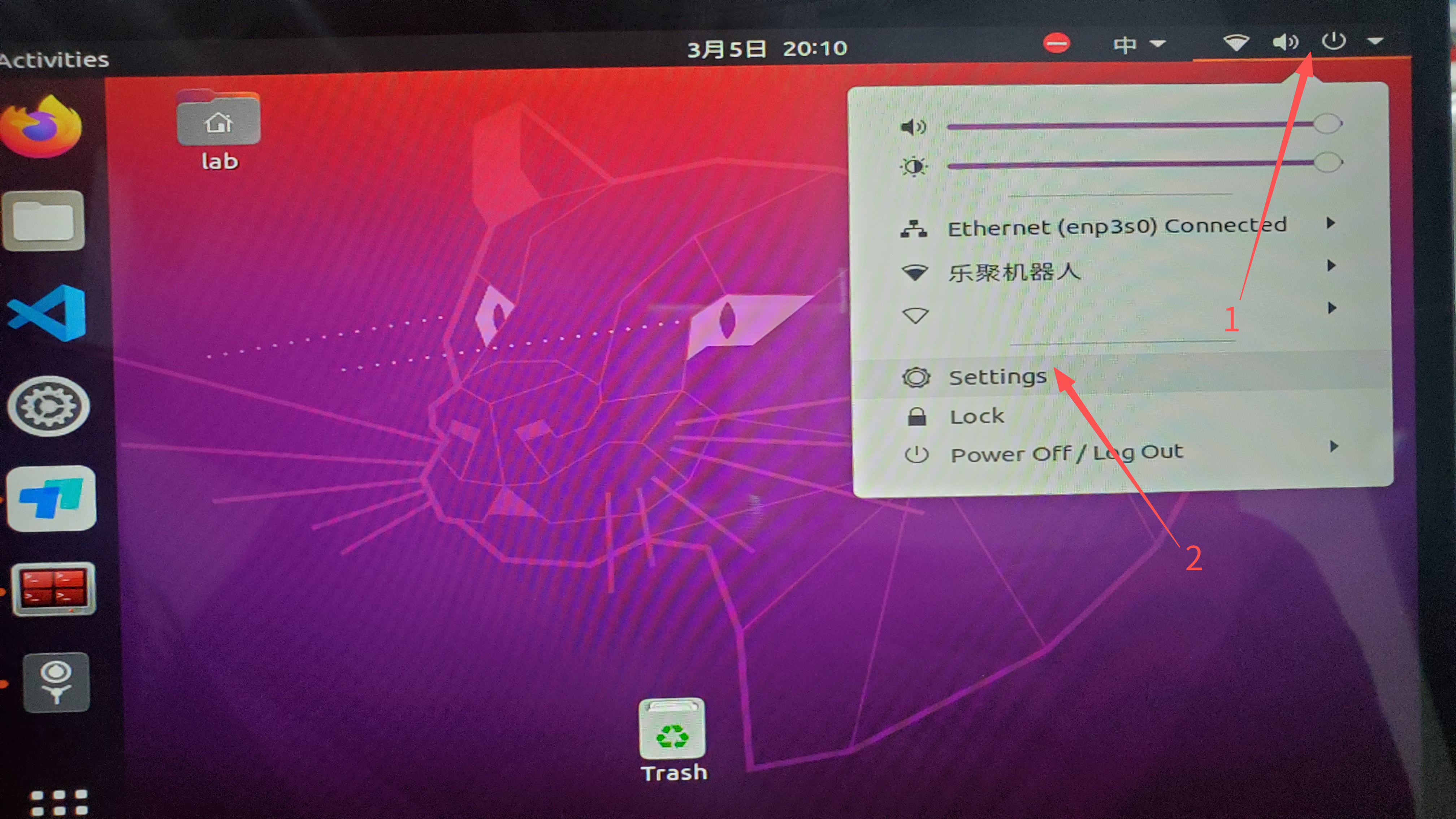
1、上位机外接屏幕,输入密码:leju_kuavo 进入桌面:
- AGX上位机:把屏幕电源线、鼠标、键盘用tycp-c拓展坞接到上位机拓展口,hDMI线就用dp转hmi转接头接到上位机
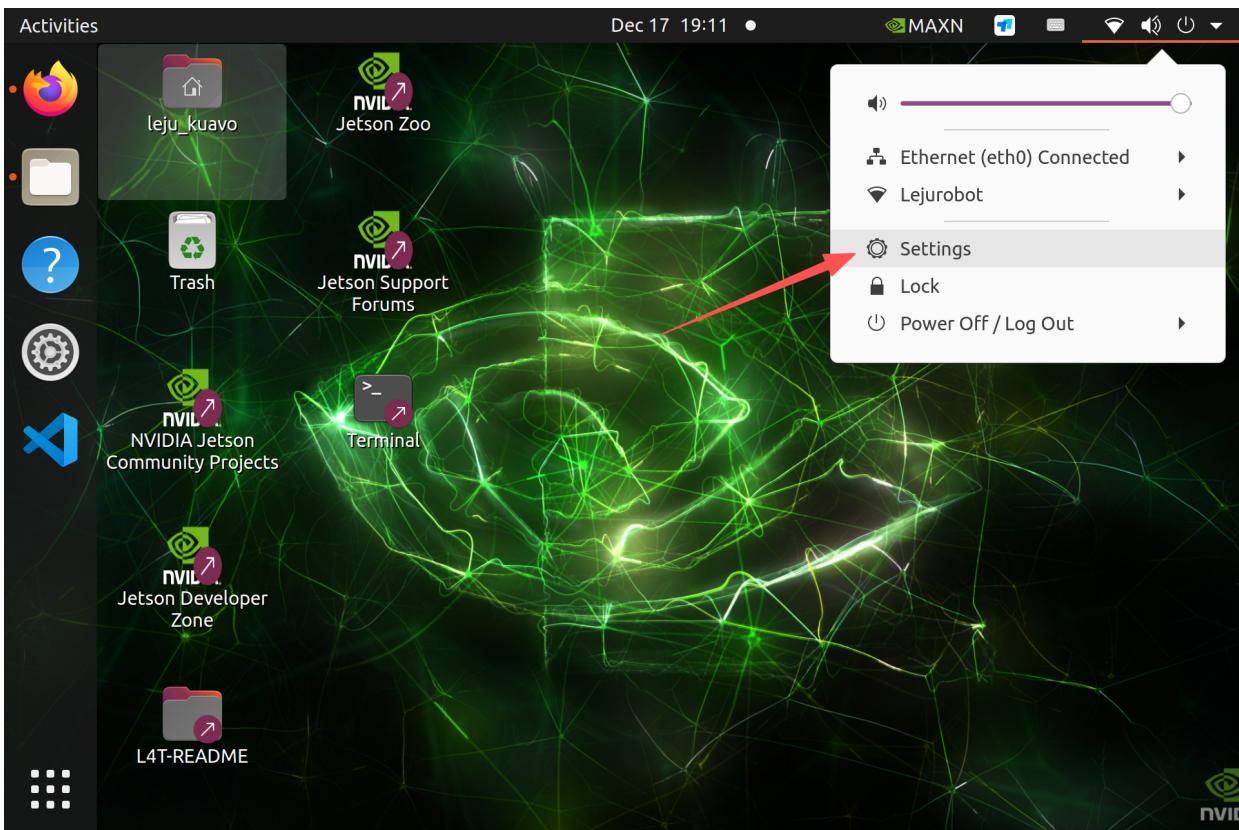
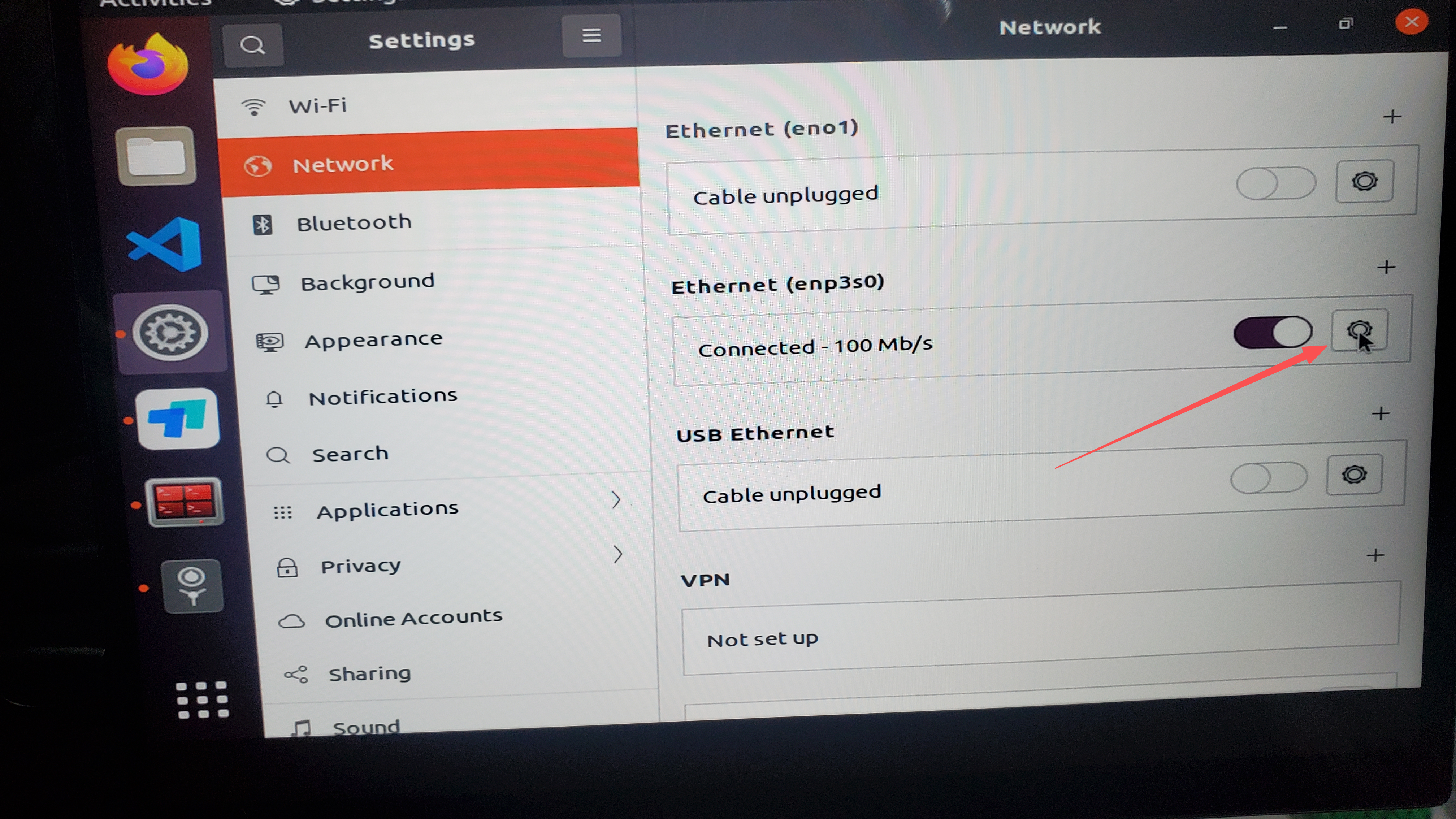
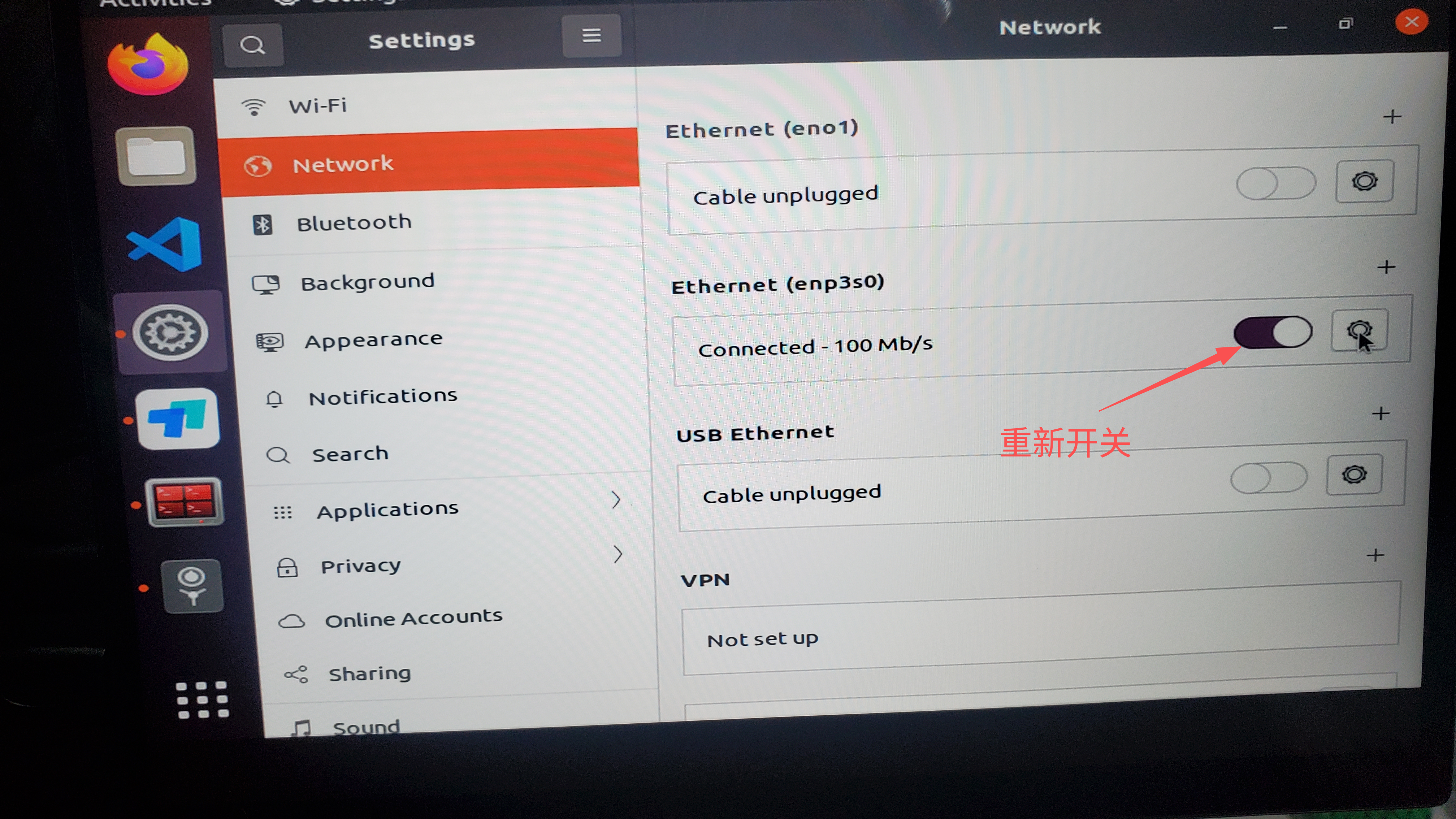
2、进入设置配置IP,如下图:
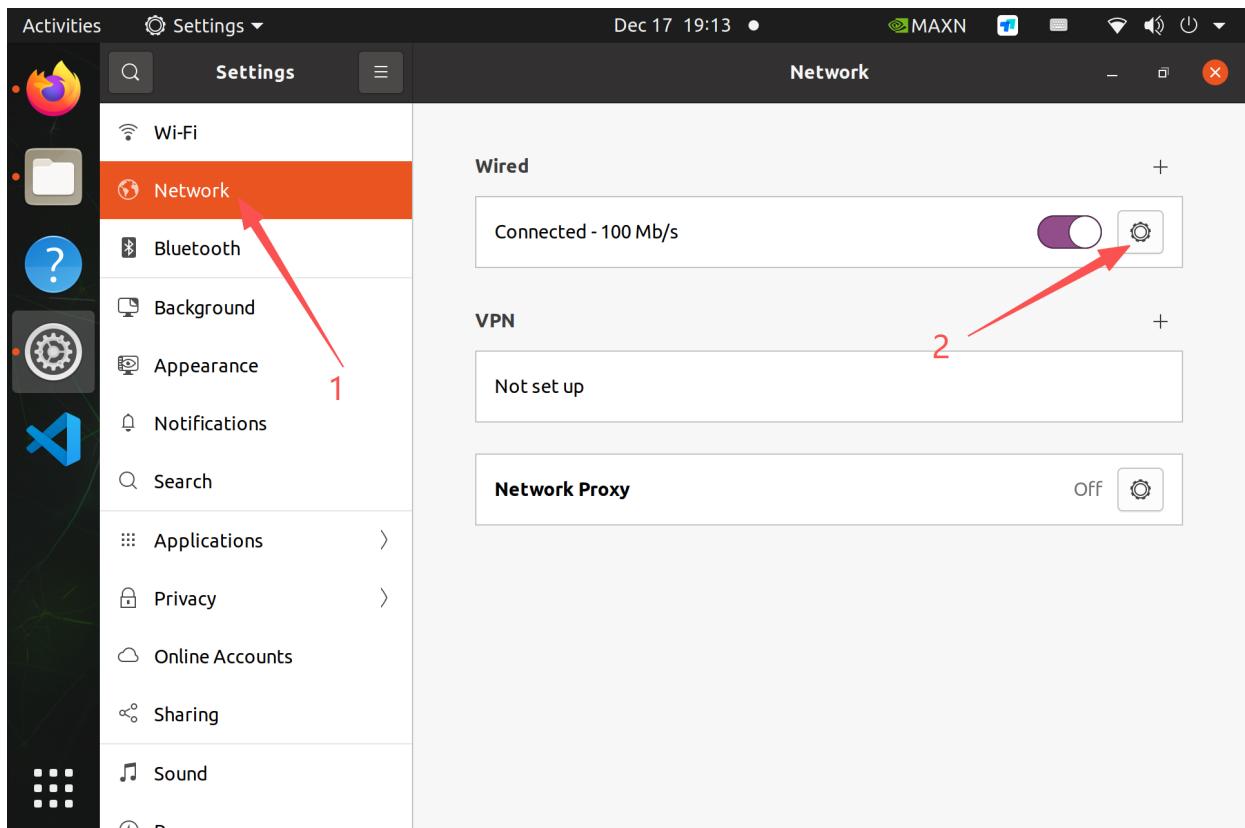
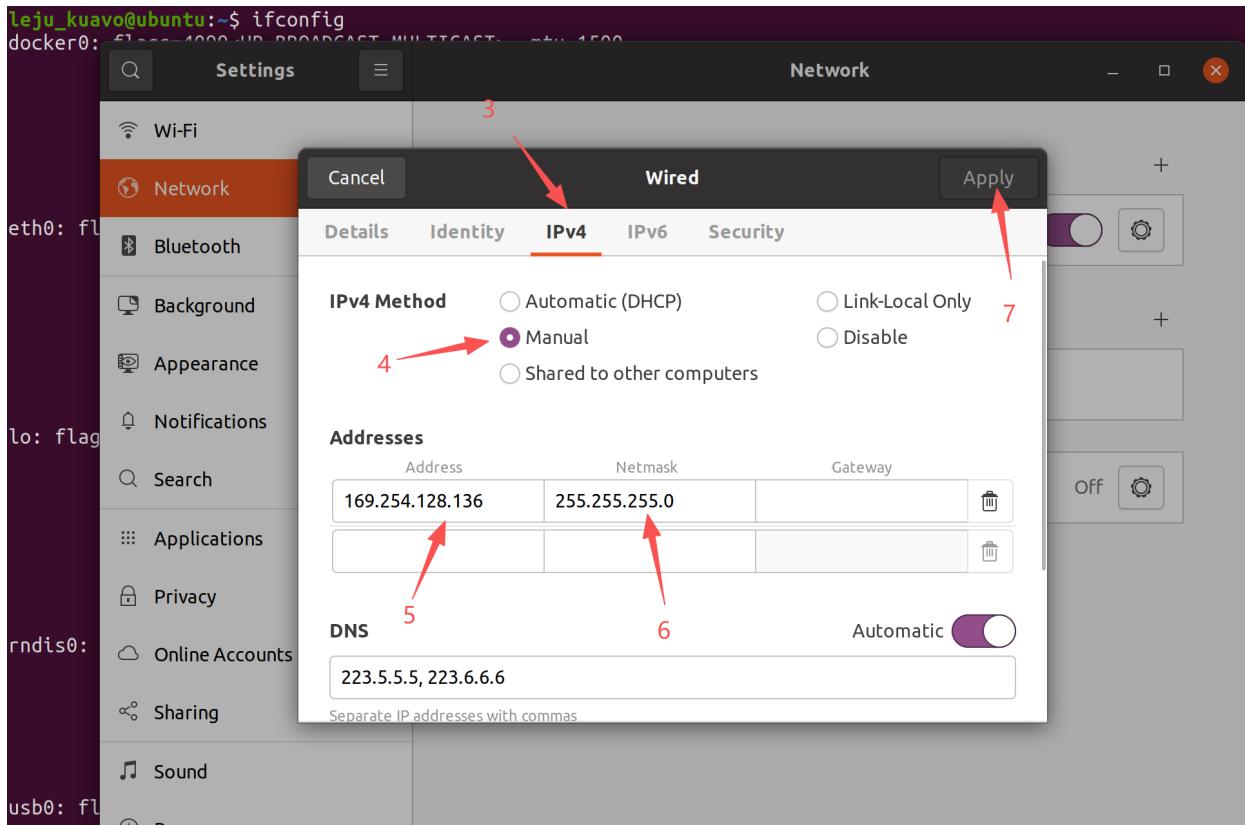
3、将网口设置成 Manual,地址设置为 169.254.128.136,网关设置为 255.255.255.0,修改后点击 Apply,如下图:
3.下位机固定IP
1、下位机外接屏幕,将网卡设置为自动(DHCP),如下图:

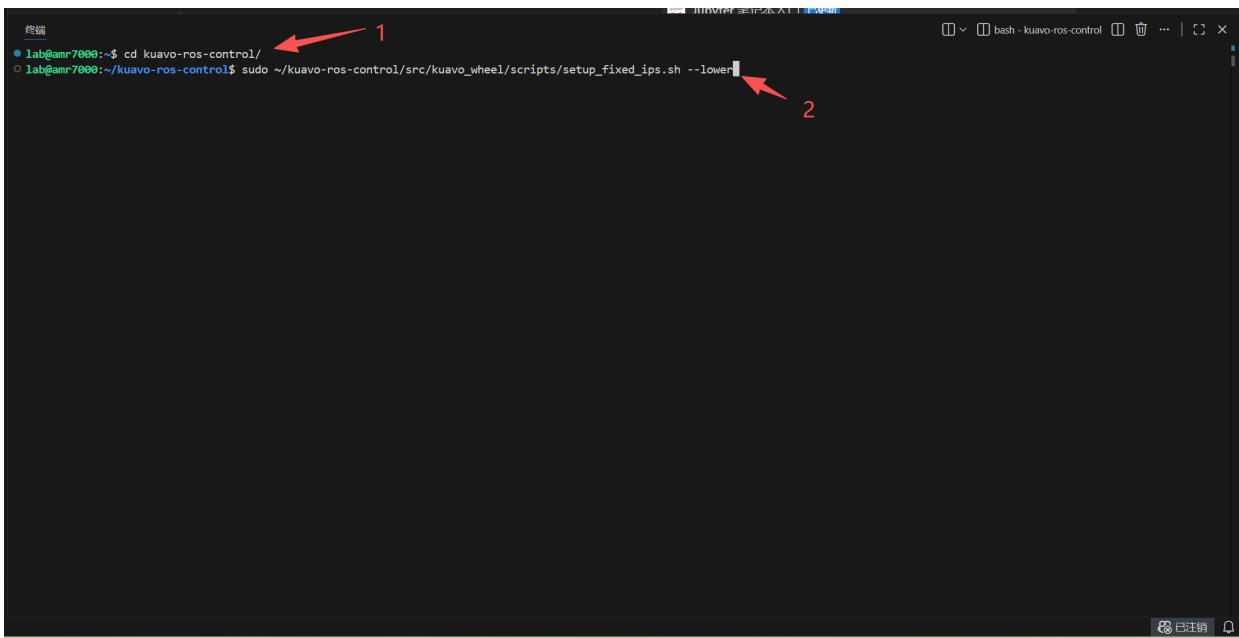
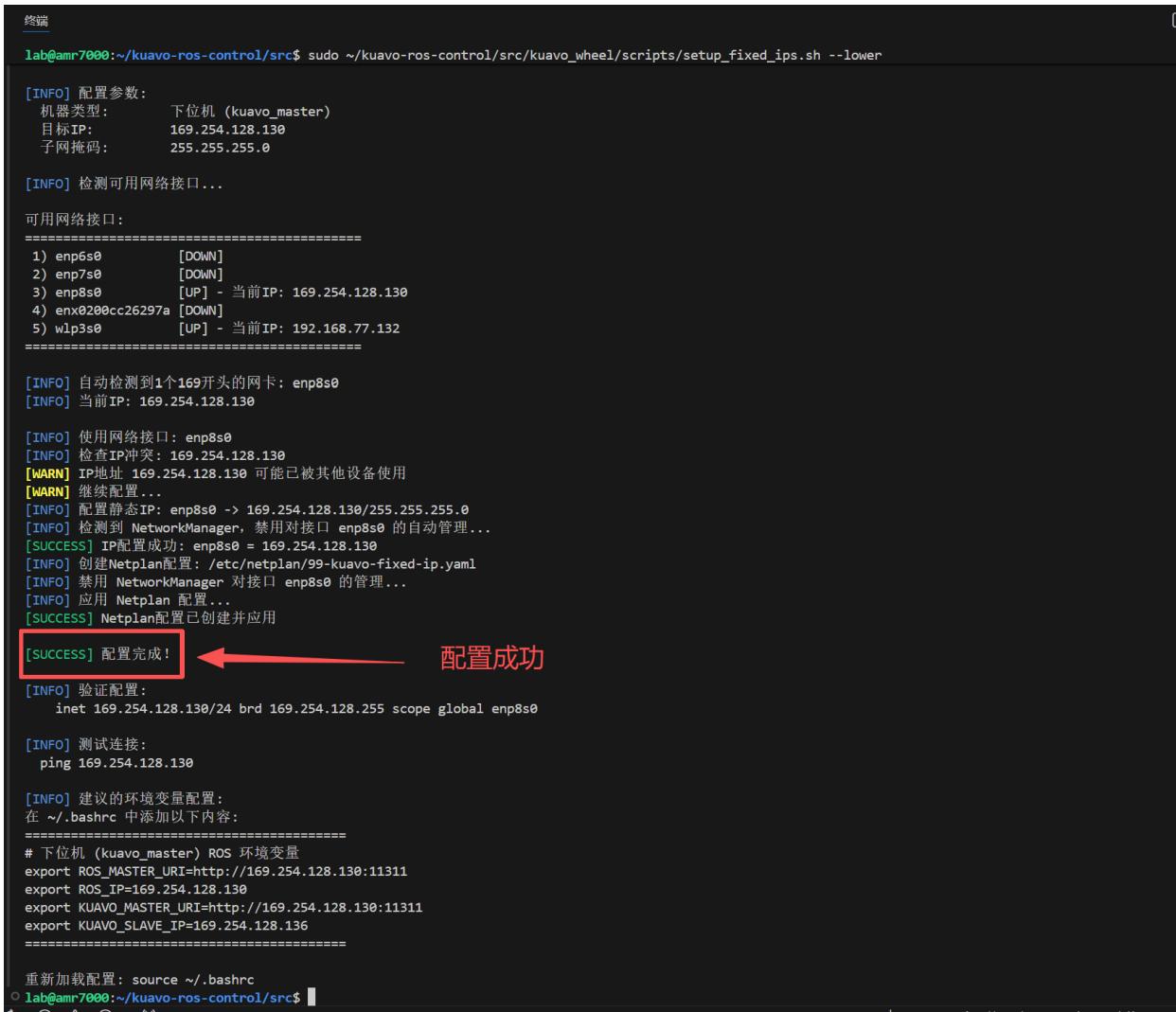
2、新建终端,执行以下命令,如下图:
cd kuavo-ros-opensource
sudo ~/kuavo-ros-opensource/src/kuavo_wheel/scripts/setup_fixed_ips.sh --lower
3、配置成功后,如下图:
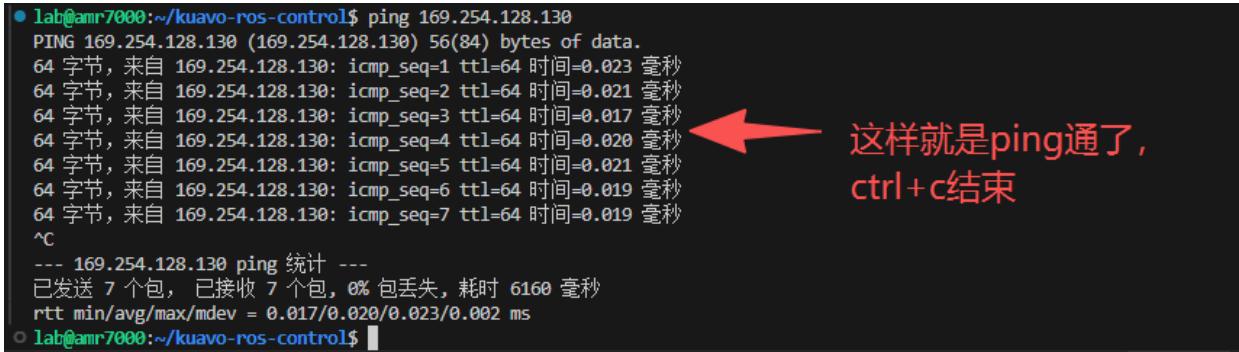
4、在终端ping 169.254.128.130,能ping 后期才能连接底盘:
ping 169.254.128.130
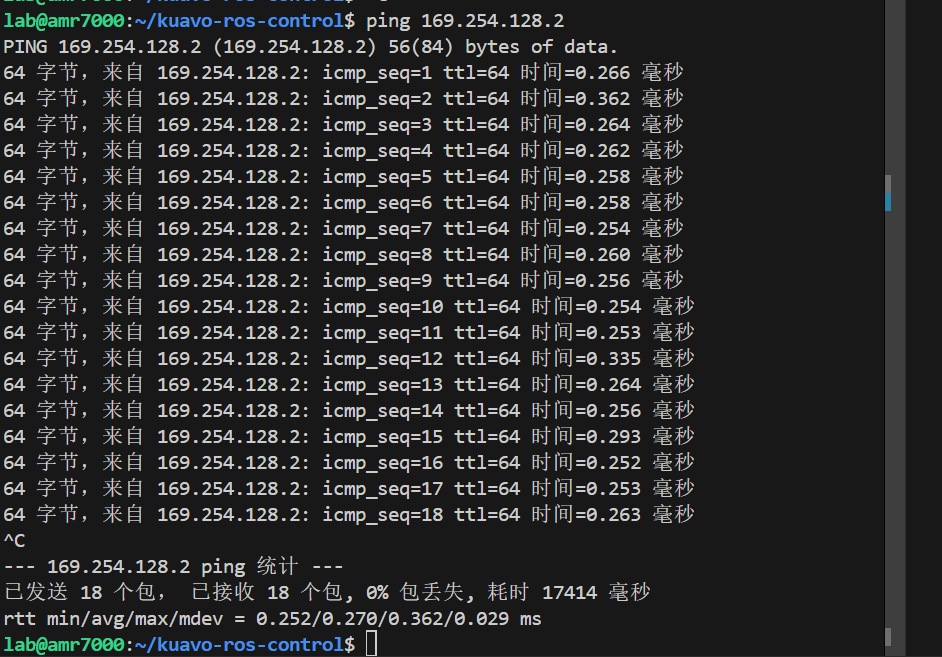
5、在终端ping 169.254.128.2,测试下位机和底盘通讯是否正常:
ping 169.254.128.2
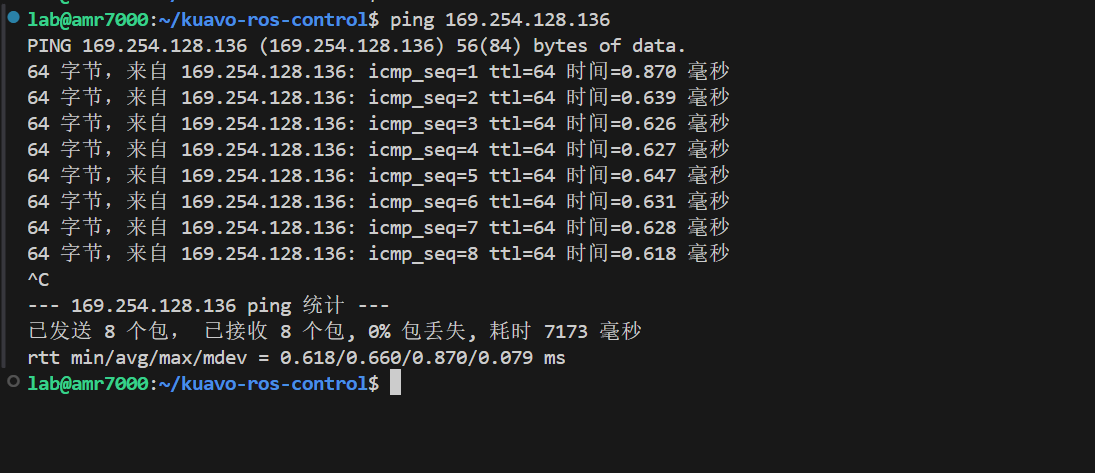
6、在终端 ping 169.254.128.136,测试下位机与上位机的通讯是否正常:
4.配置喇叭
1、下位机打开终端,配置udev规则,配置完成后重启机器:
cd ~/kuavo-ros-opensource/src/kuavo_wheel
sudo ./audio-udev-new.sh

2、下位机接屏幕,进入设置中的音频项,测试喇叭是否有声音
5、配置灵巧手(根据实际配置选择灵巧手配置、夹爪、触觉灵巧手配置)
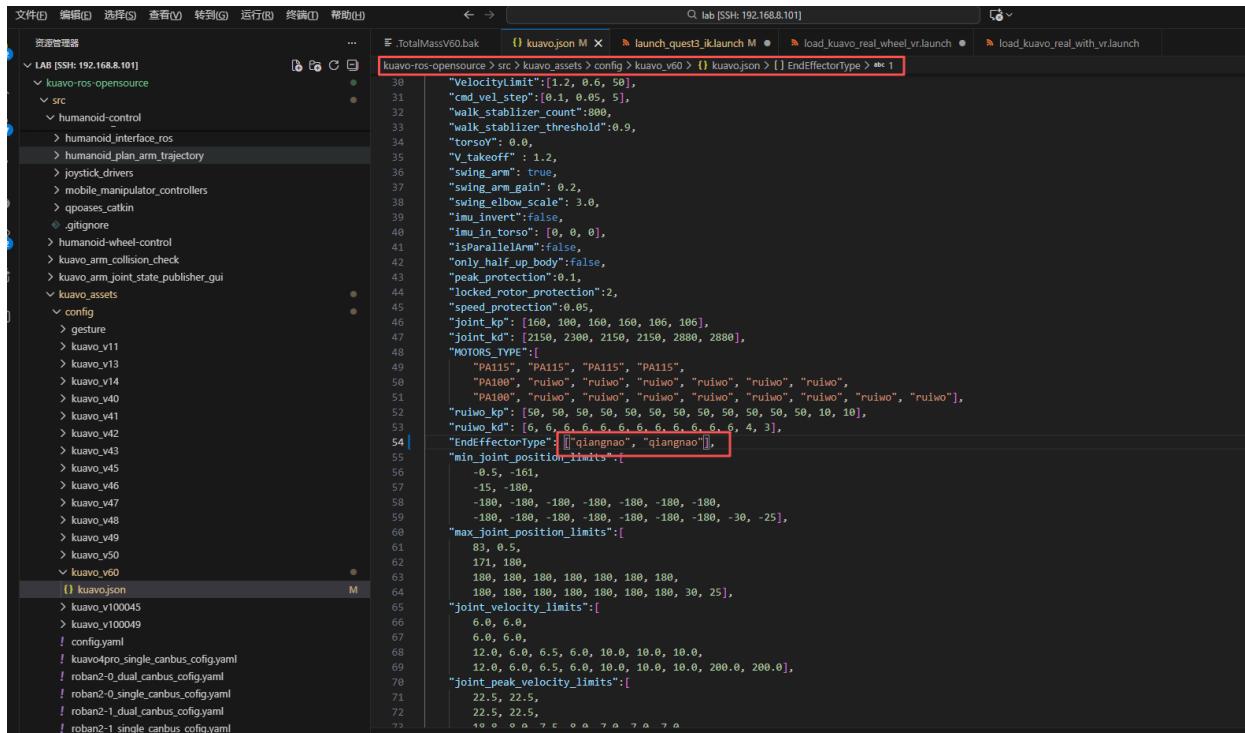
1、修改src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json配置文件中第50行的EndEffectorType参数
"EndEffectorType": ["qiangnao", "qiangnao"],
下图为ROBOT_VERSION = 60版本的修改示例图,修改后ctrl+s保存,如下图:
新建终端
cd ~/kuavo-ros-opensource/tools/check_tool
sudo python3 Hardware_tool.py
输入字母o加回车展开开发工具栏
输入相应按键进行灵巧手的配置和测试
输入b加回车配置灵巧手usbudev规则
输入 c 加回车 测试灵巧手(如果没反应,需要重启 NUC 使得 udev 规则生效)
输入 j 加回车 测试触觉灵巧手、输入 1 配置usb,输入 2 测试触觉灵巧手正不正常(如果没反应,需要重启 NUC 使得 udev 规则生效)
配置自研二指爪
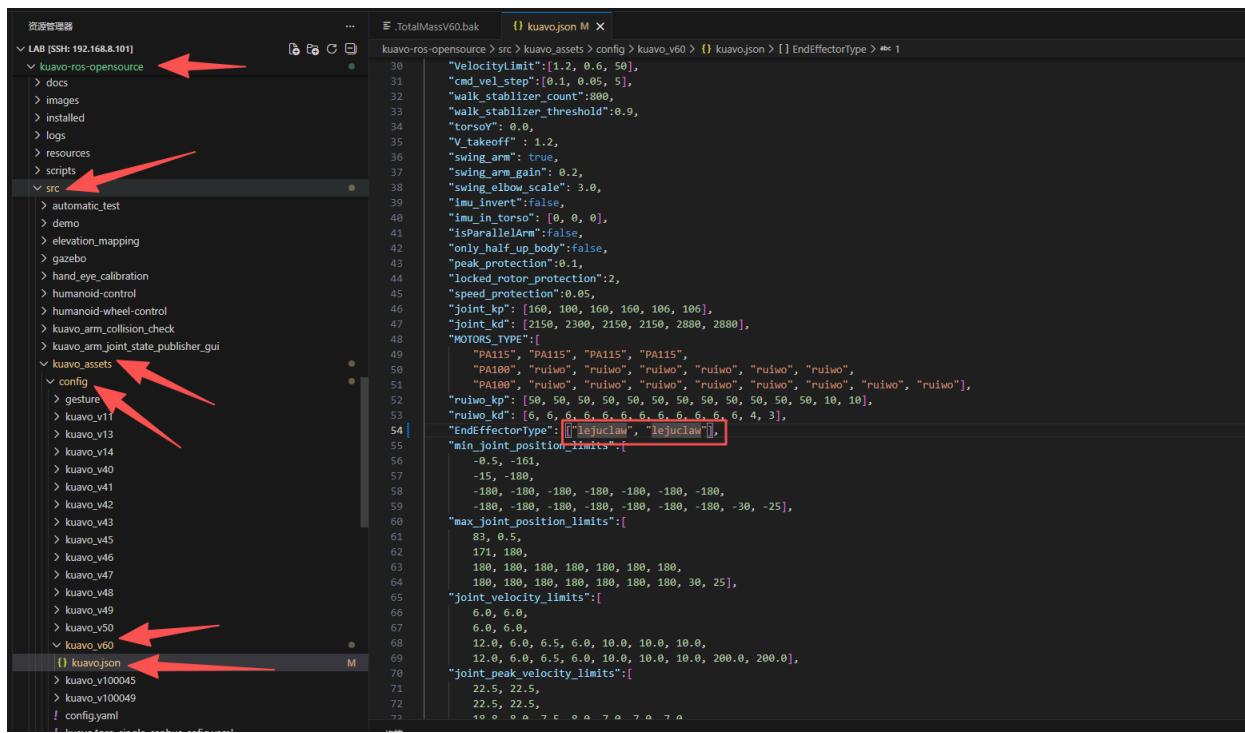
1、修改 src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json 配置文件中第50行的EndEffectorType 参数
"EndEffectorType": ["lejuclaw", "lejuclaw"],
下图为ROBOT_VERSION = 60版本的修改示例图,修改后ctrl+s保存,如下图:
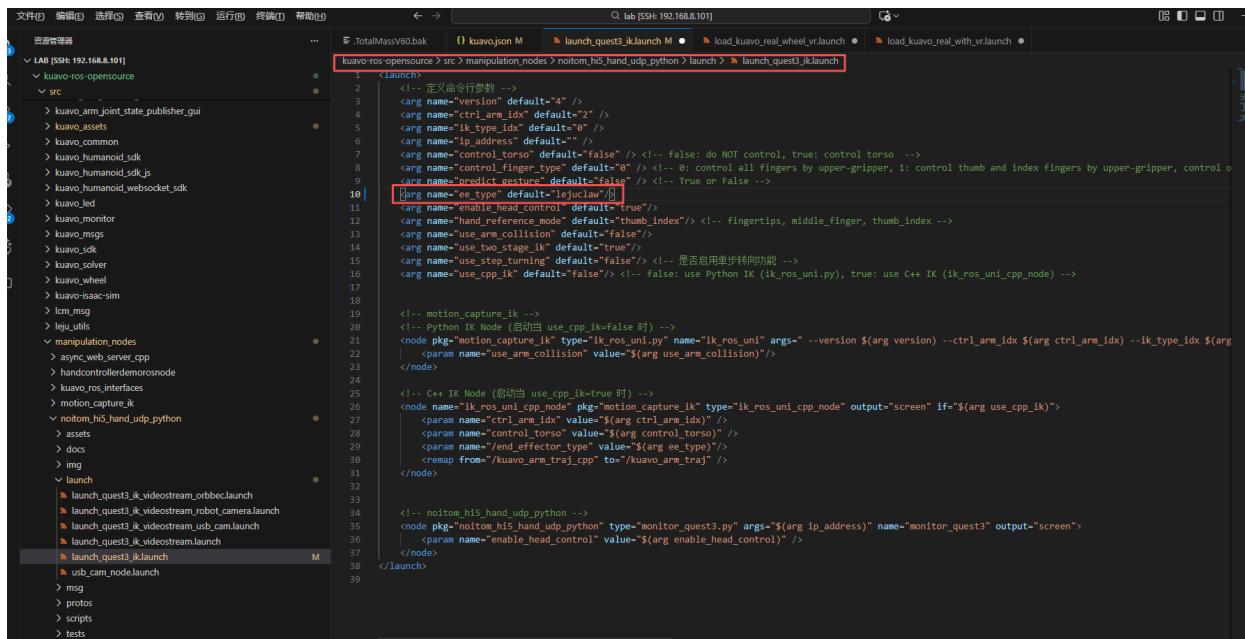
2、修改kuavo-ros-opensource/src/manipulation_nodes/noitom_hi5_hand.udp_PYthon/launch/launchquest3_ik
Launch文件中的第10行
#原代码
<arg name="ee_type" default="qiangnao"/>
#修改为
<arg name="ee_type" default="lejuclaw"/>
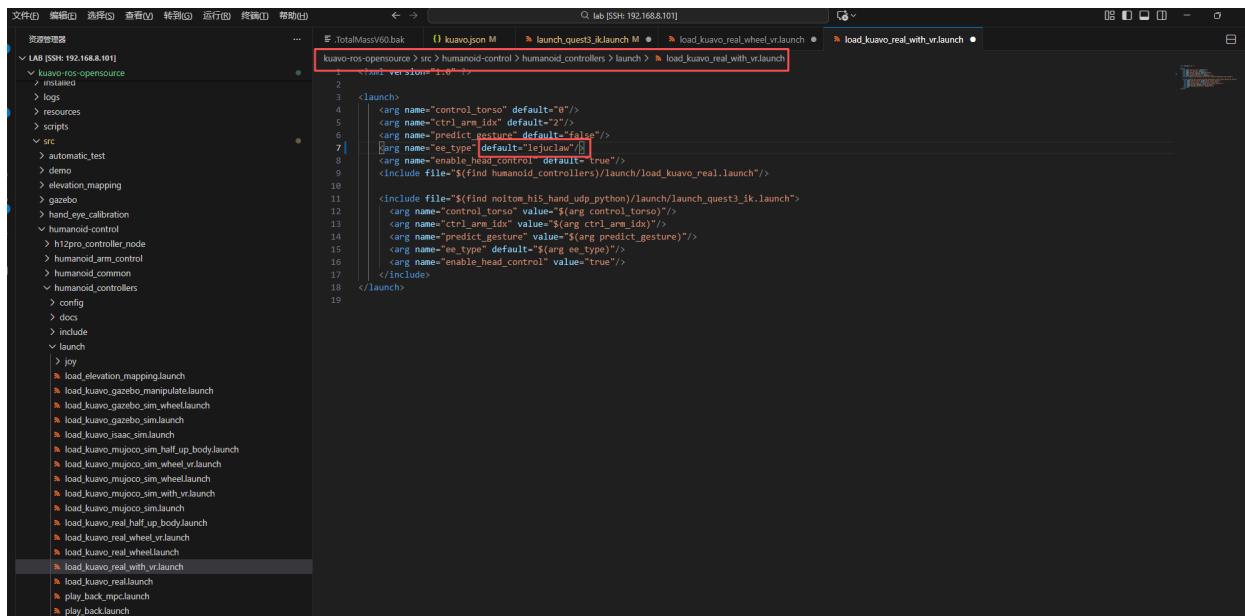
3、修改kuavo-ros-opensource/src/humanoid_control/humanoid_controllers/launch/load_kuavo_real_with_vr.launch 文件中的第7行与 load_kuavo_real_wheel_vr.launch 文件中的第8行
#原代码
<arg name="ee_type" default="qiangnao"/>
#修改为
<arg name="ee_type" default="lejuclaw"/>
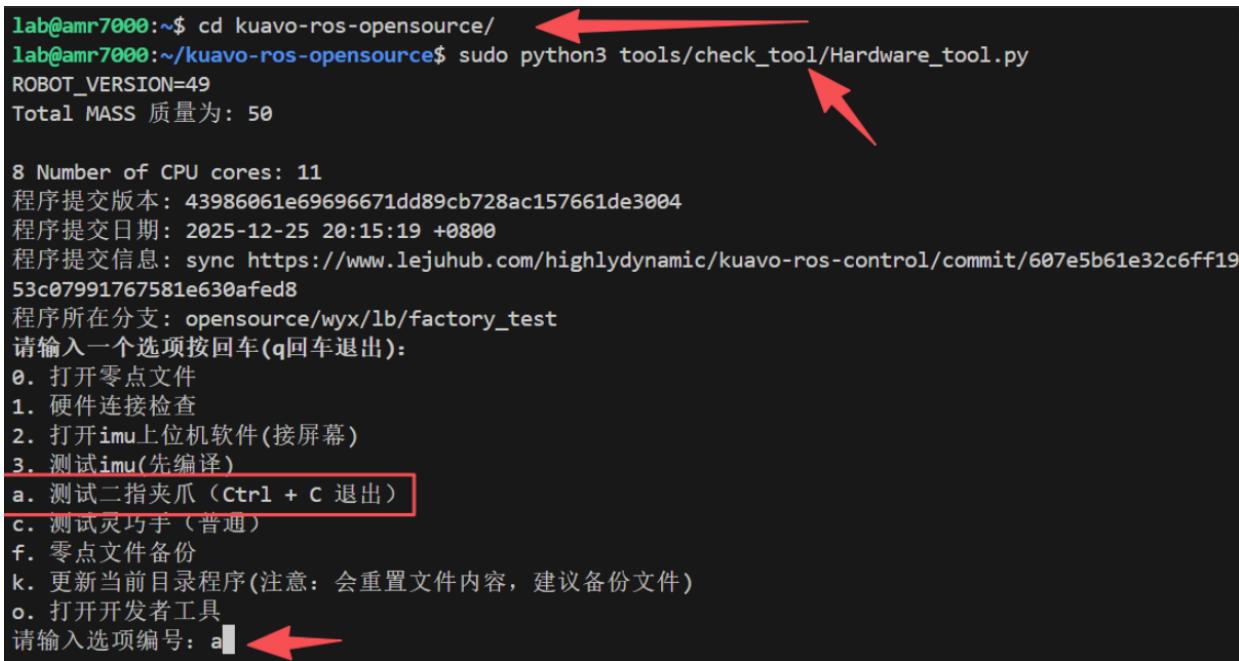
4、测试二指夹爪,新建终端,执行以下命令:
cd kuavo-ros-opensource/
sudo python3 tools/check_tool/Hardware_tool.py
选择a,测试二指夹爪,如下图:
配置触觉灵巧手
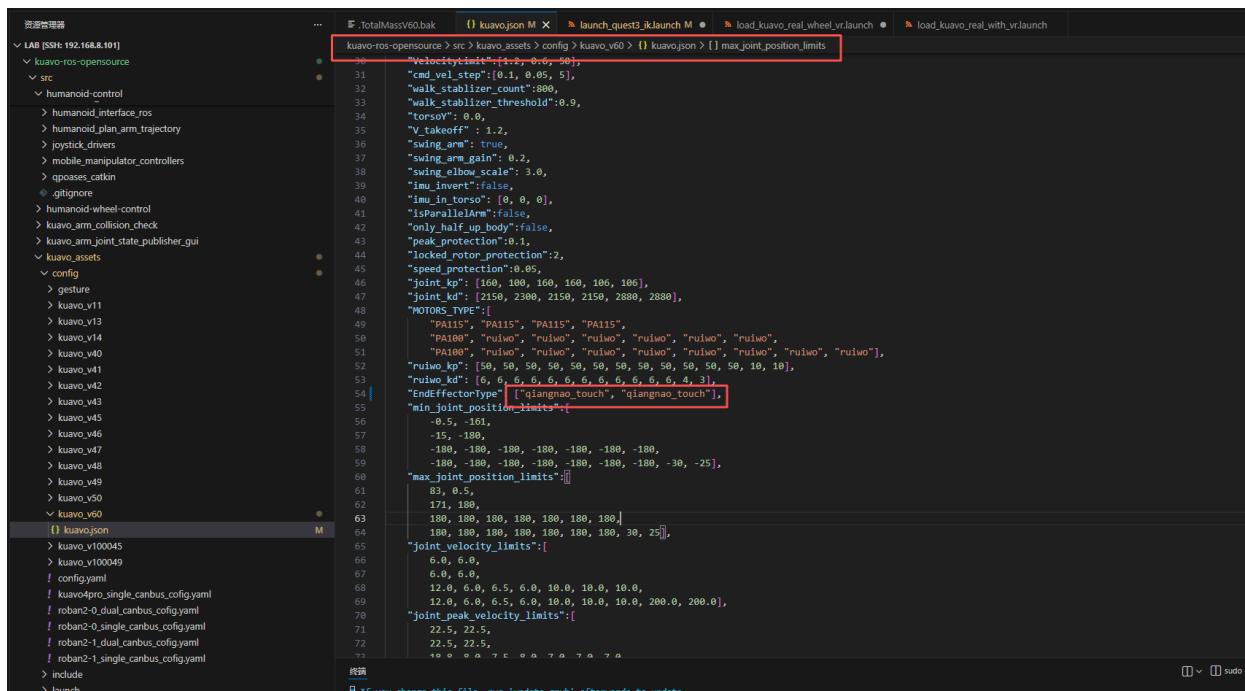
1、修改 src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json 配置文件中第50行的EndEffectorType 参数
"EndEffectorType": ["qiangnao_touch", "qiangnao_touch"],
下图为ROBOT_VERSION = 60版本的修改示例图
2、修改kuavo-ros-opensource/src/manipulation_nodes/noitom_hi5_hand.udp_PYthon/launch/launchquest3_ik
Launch 文件中的第10行
#原代码
<arg name="ee_type" default="qiangnao"/>
#修改为
<arg name="ee_type" default="qiangnao_touch"/>
3、修改kuavo-ros-opensource/src/humanoid-control/humanoid-controllers/launch/load_kuavo_real_with_vr.launch 文件中的第7行
#原代码
<arg name="ee_type" default="qiangnao"/>
#修改为
<arg name="ee_type" default="qiangnao_touch"/>