标定全身零点
1、轮臂电机编号
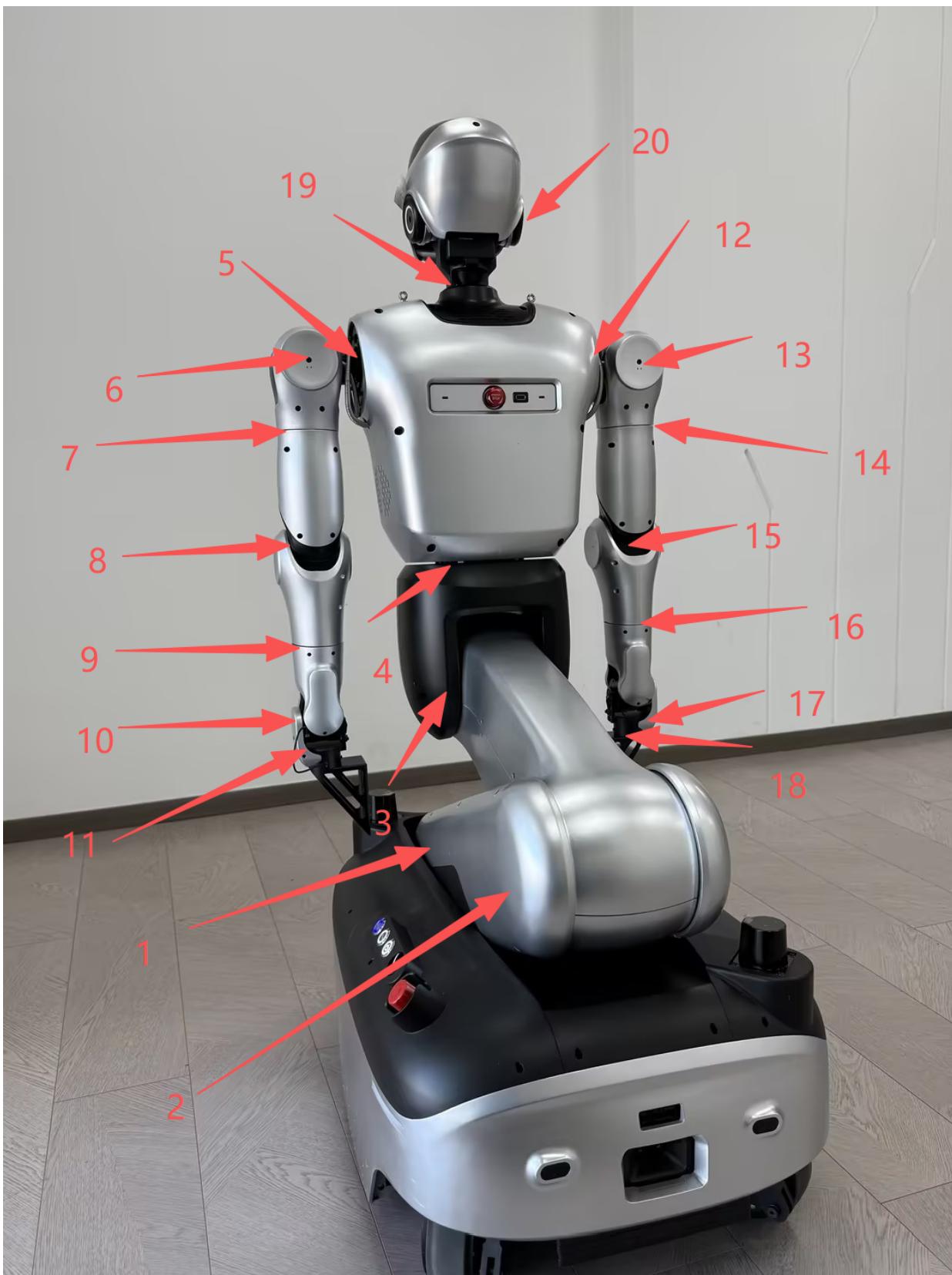
新建终端,将手臂与头部调整到零点姿态后,启动标定程序:
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_wheel.launch cali:=true cali_leg:=true cali_arm:=true ##标定腿部和手臂、头部
2、按提示进入 0 扭矩并调整到零点
当日志提示“是否执行 0 扭矩控制前六个关节”时:
- 用吊机吊起上半身,避免下坠。
- 在终端输入
y确认后,腿部电机将进入“软”状态。 - 由于重力影响,下半身部分关节会下压;此时手动将 3、4 号电机摆正到位。
完成后,该姿态即为机器人零点位置,如下图所示:

3、保存零点并退出
零点姿态调整完成后,按以下顺序操作:
- 按
x:退出当前控制/调整流程 - 按
c:保存零点 - 按
q:退出程序
如下图所示:
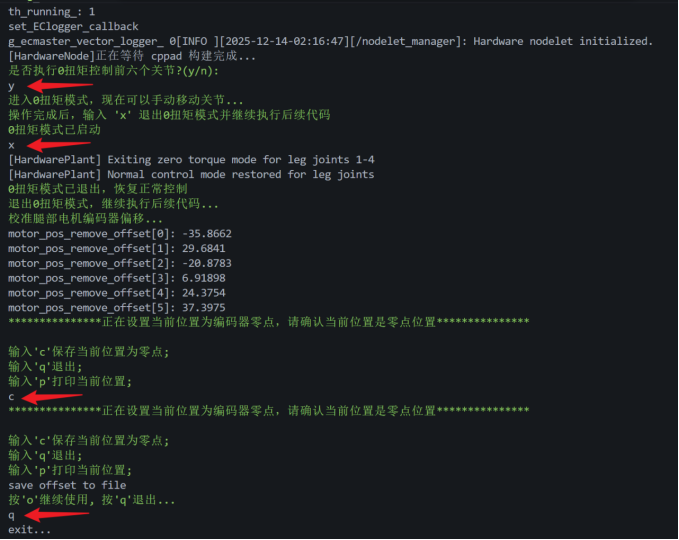
至此,零点标定完成。