机器人导航案例
- 机器人导航案例
- Kuavo 上位机导航程序编译手册
- Kuavo 上位机导航GUI界面使用手册
- Kuavo 上位机导航程序建图与导航使用手册
- 导航接口说明手册
机器人导航案例
机器人导航案例包括功能有:雷达slam建图、路线规划、定位与导航、停障
⚠️⚠️⚠️ 注意: 该案例仅向展厅版用户开放
Kuavo 上位机导航程序编译手册
程序编译
1、获取代码
git clone https://www.lejuhub.com/ros-application-team/kuavo_ros_navigation.git
或
git clone ssh://git@www.lejuhub.com:10026/ros-application-team/kuavo_ros_navigation.git
2、导航功能包编译
注:若非第一次编译,需删使用命令
sudo rm -rf build devel除编译文件使用以下命令编译即可
cd ~/kuavo_ros_navigation/
catkin_make
3、添加source环境变量
- 注:若~/.bashrc中已有该部分环境变量,可不用执行下述操作
echo "# kuavo_ros_navigation
source ~/kuavo_ros_navigation/devel/setup.bash --extend" >> ~/.bashrc
Kuavo 上位机导航GUI界面使用手册
GUI界面
1、程序启动
roslaunch dx_chassis_manager dx_chassis_manager.launch
roslaunch nav_gui nav_gui.launch
2、GUI界面简介
程序启动以后出现以下界面
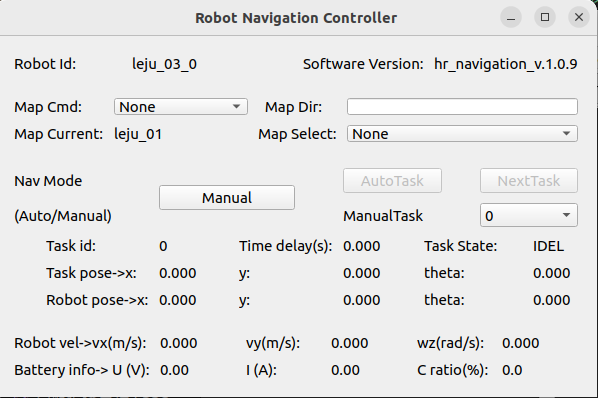
定位导航 GUI 界面是基于《定位导航系统 API 定义》里的 API 接口,开发的一款集地图管理、任务管理和图片保存功能的 GUI 界面,目的是方便快速测试机器人的功能,省去命令终端手敲命令行的烦恼。
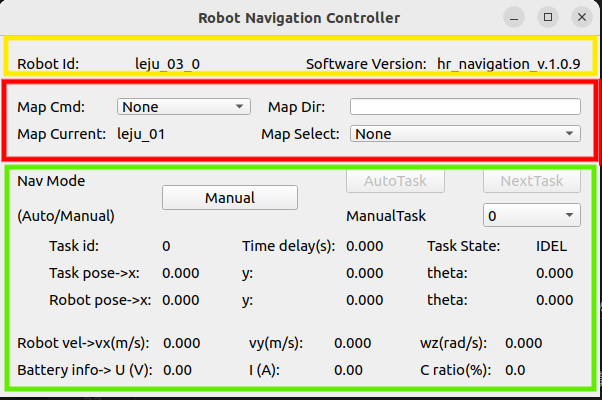
其中导航 GUI 界面整体布局:黄色为机器人系统信息显示模块,红色为地图管理模块,绿色为任务管理模块
3、机器人系统信息显示模块
该部分连接机器人信息,显示机器人的ID以及机器人导航系统的版本号

4、地图管理模块
该部分为地图管理模块,主要功能有:建图指令、地图保存指令、设置机器人当前地图等

4.1 建图指令
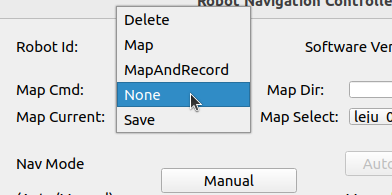
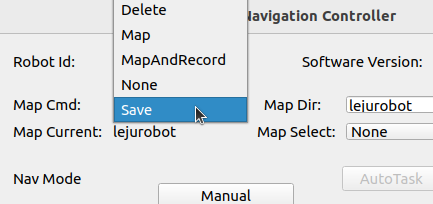
建图命令框,map cmd 中有以下类选项:
其中
--- None:无动作
--- Map:新建地图
---MapAndRecord: 新建地图的同时记录 rosbag 包
---Save:保存新建的地图,然后自动切换为导航模式,并使用新建的地图
---Delete:删除地图
地图路径(地图名称),该路径为地图的相对路径,地图基路径为 “/home/kuavo/maps”
例:因此当地图名称为 “test” 时,机器人的地图绝对路径为 “/home/kuavo/maps/test” ,当地图名称缺省时,机器人地图绝对路径为“/home/drivex/maps”
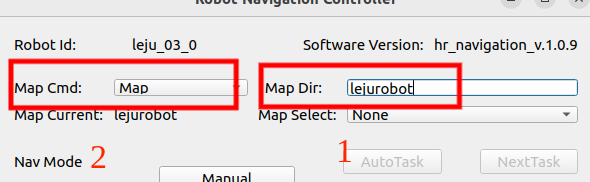
建图之前,可以在 Map Dir 中输出此次建立地图的名称。例如我想要建立名为 lejurobot 的地图,可以在 Map Dir 中输入lejurobot

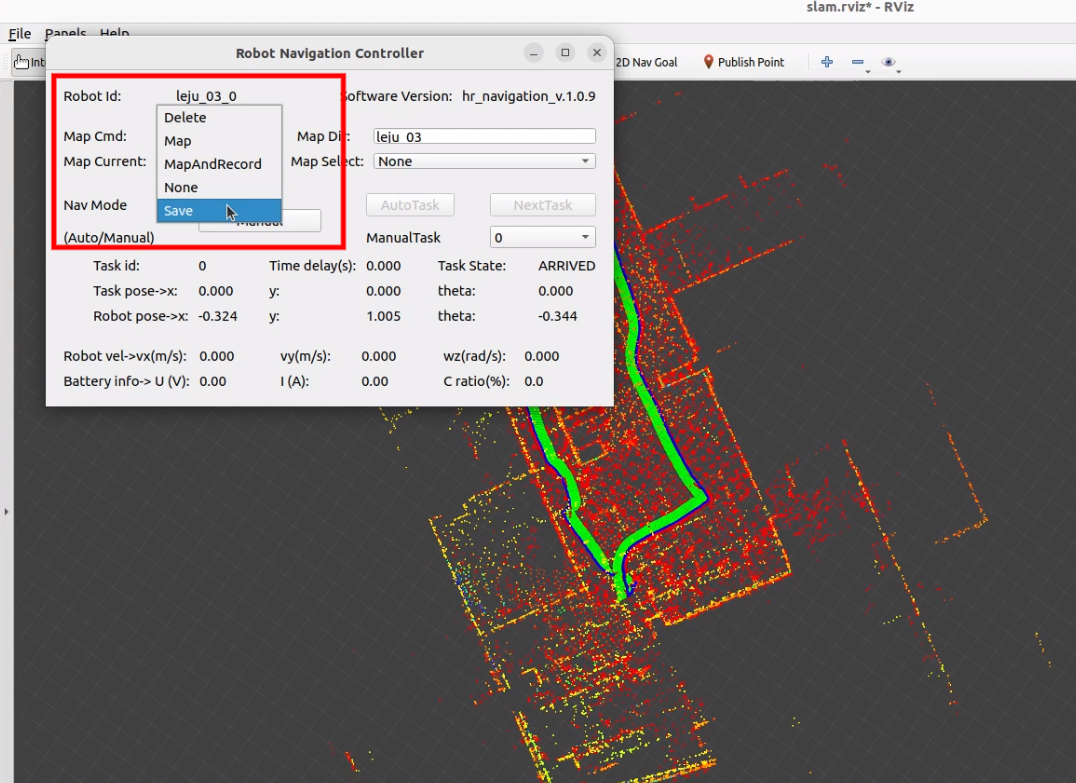
地图建立完成以后,在 map cmd 中,选择 Save 保存地图
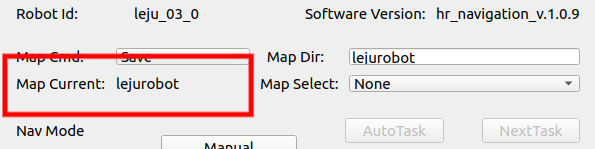
4.2 当前地图名称
在Map Current 标签中,可以看到机器人当前使用的地图名称 map cmd 中
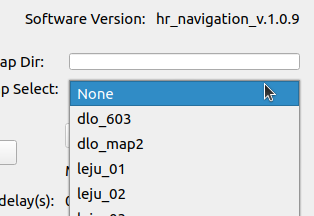
4.3 地图切换
“Map Select” 下拉列表里是机器人内存储的所有有效地图名称列表,点击并选择相应条目,即可实现地图的切换。
4.4 地图删除
首先,”Map Dir”栏里输入要删除的地图名称,如“test”,然后,“Map Cmd”下拉列表里选择“Delete”指令,删除指定地图

注意:为了防止定位程序出错,不允许删除当前使用的地图,也即“Map Current”栏显示的地图,否则会弹出警告信息,如果确实要删除该地图请先切换到其它地图,然后再重新执行删除
5、任务管理模块
任务管理模块主要由任务执行控制、当前任务状态显示和机器人基本信息三部分组成
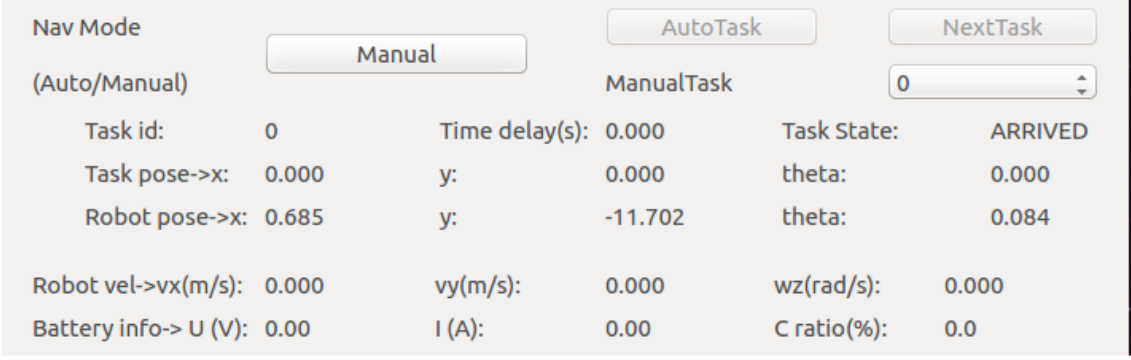
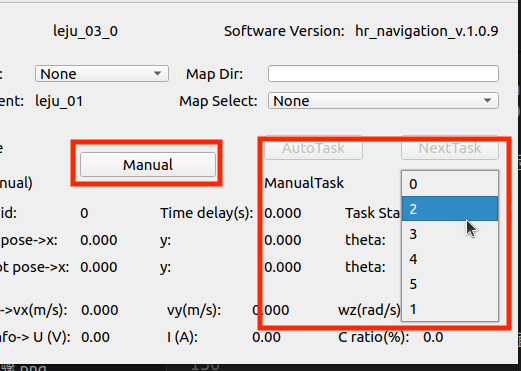
5.1 任务执行控制
- 按钮“Manual/Auto”:模式切换手动/自动运行任务
- 按钮“AutoTask”:开始执行自动任务
- 按钮“NextTask”:强制开始下一个任务
- 下拉列表“ManualTask”:手动选择要执行的任务
5.2 当前任务状态
- Task id – 当前正在执行任务的 id 号
- Time delay – 当前任务点到达之后的等待时间,单位:s,当 time delay 大于 0 时,机器人到达该目标点之后等待时间超过 time delay 之后就会自动执行下一个任务点,当 time delay 小于 0 时,机器人将一直等待直到其它节点下发下一个任务点。
- Task State: 执行当前任务点的状态如下:
- IDEL – 机器人未执行任何任务
- FOLLOW – 机器人正在执行当前任务,且机器人离目标点较远
- ARRVING – 机器人正在执行当前任务,且机器人离目标点较近,此时机器人会降速
- ADJUSTDIRECTION – 机器人正在执行当前任务,机器人位置已经到达,正在调整航向角
- ARRIVED – 机器人成功到达目标点,机器人停止,直至下一个任务下发
- FAIL—机器人到达目标点失败,机器人停止,直至下一个任务下发
5.3 机器人基本信息
- Robot vel-> 机器人实时速度信息:
- vx(m/s): 行驶线速度(前后),前向为正,单位:m/s
- vy(m/s): 行驶角速度(左右),左向为正,单位:m/s
- wz(rad/s): 行驶角速度,逆时针为正,单位: rad/s
Kuavo 上位机导航程序建图与导航使用手册
1、建图
1.1 程序启动
- 启动导航程序之前确保程序已经编译
roslaunch dx_chassis_manager dx_chassis_manager.launch
roslaunch nav_gui nav_gui.launch
1.2 建图步骤
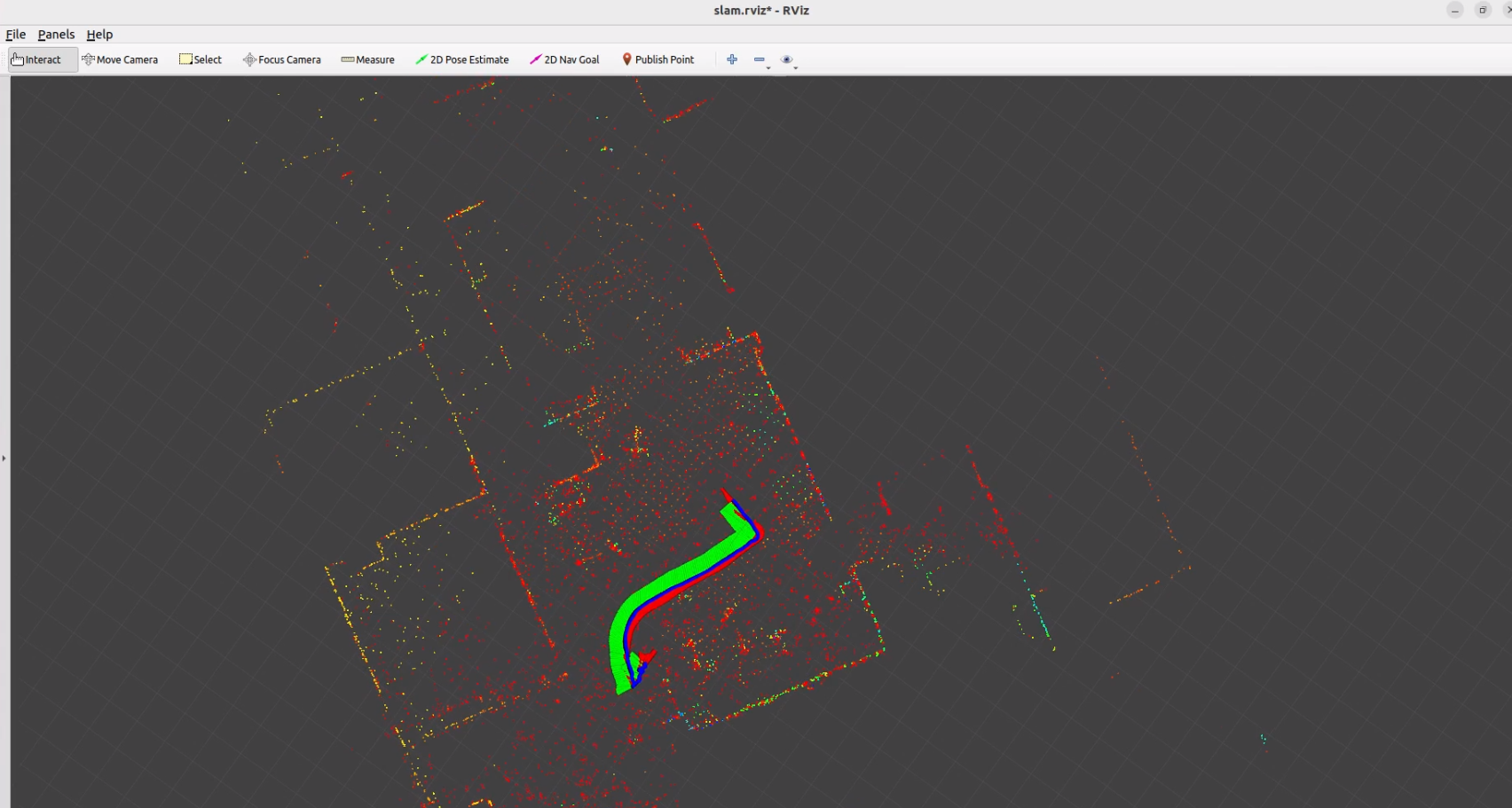
在GUI界面中,在 Map Dir 中添加本次建图的名称,然后将 Map Cmd 中切换为 Map ,之后打开 RVIZ , 移动机器人进行建图
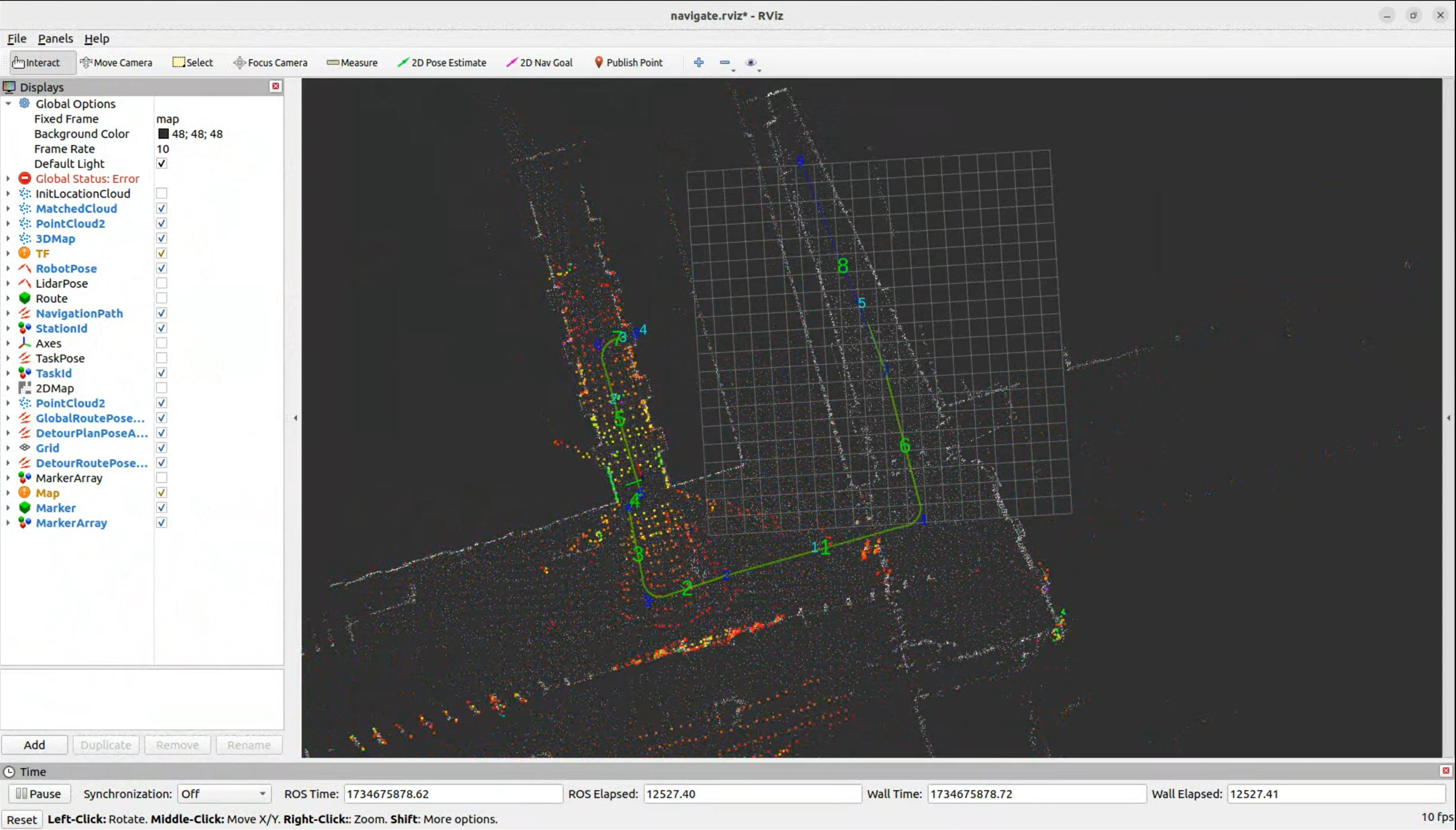
RVIZ 建图界面
建图完成以后,在GUI界面 Map Cmd 中切换为 Save 保存地图
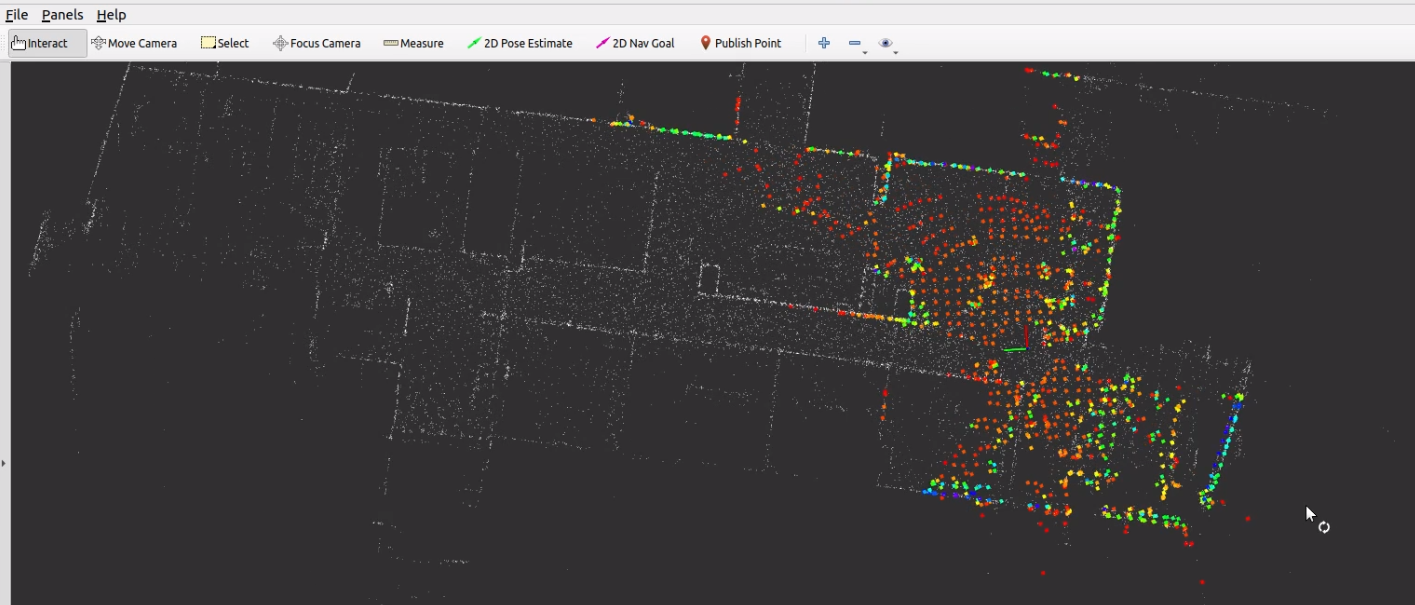
之后RVIZ界面效果如下图所示
1.3 路径与路径点设置步骤
地图建立完成以后,需要编辑道路,即告诉机器人哪部分道路为可行使区域。同理我们现实的道路,城市与城市之间通过道路相连,这就是道路(路径),城市就是路径点。
导航采用基于道路的搜索方式,道路包含包含连通关系(节点之间的连通)、道路宽度、道路最大限速、通行状态(正常/禁止通行)。编辑道路主要分为两个步骤:节点编辑和道路属性编辑。道路、节点和任务点都可以进行增加和删除操作,当新增节点/道路/任务点 id 与旧的相同时会对旧的站点/道路/任务点进行覆盖。
1.3.1 路径点设置
- 路径点设置分为有两种操作方式:
界面操作
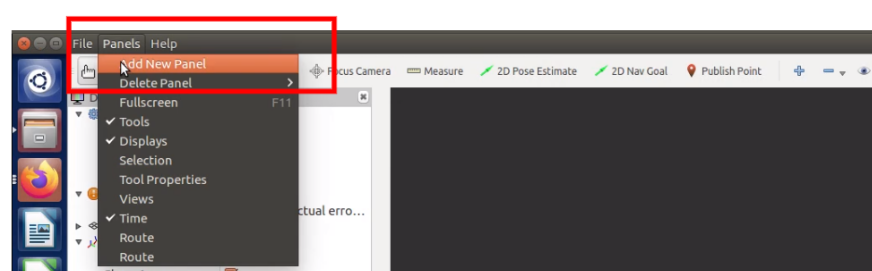
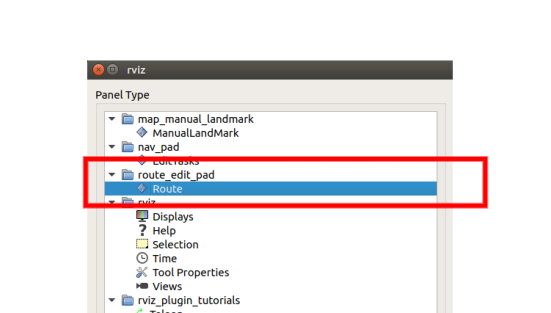
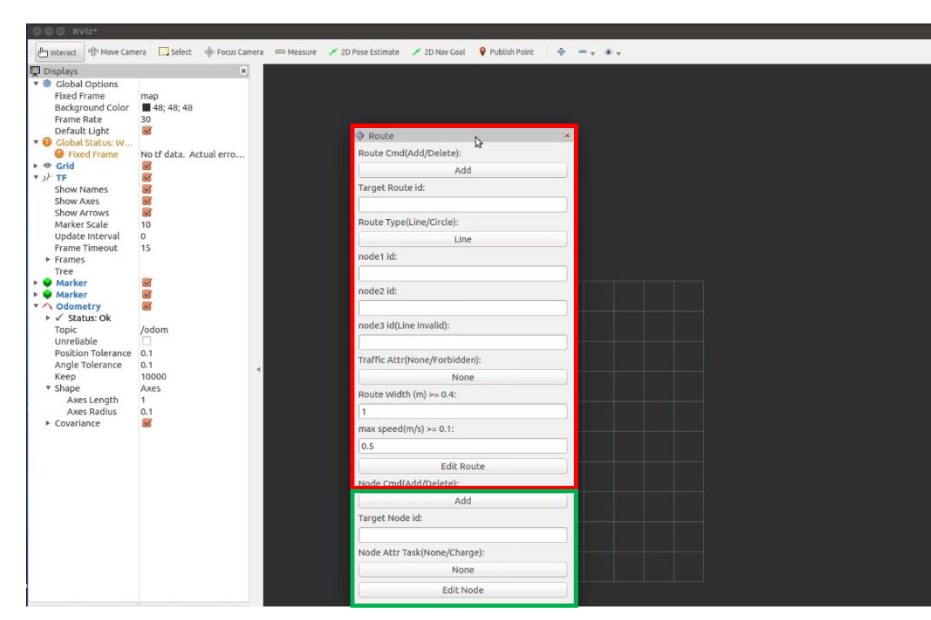
在RVIZ界面左上角点击 panels -> add new panel -> Route 进入路径点编辑界面,其中红色部分为路径编辑,黄色部分为路径点编辑
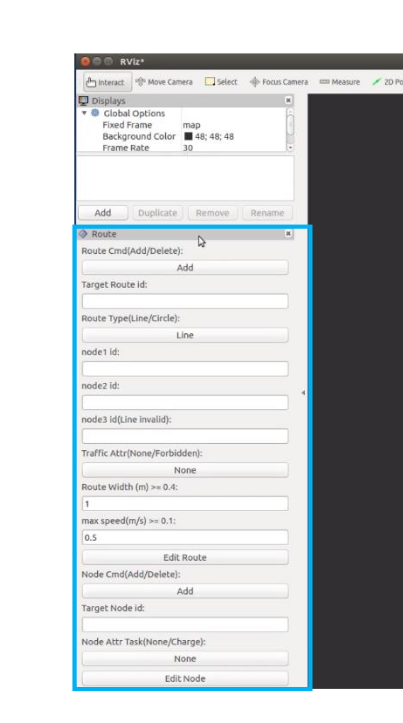
可以拖动“Route”插件到任意位置
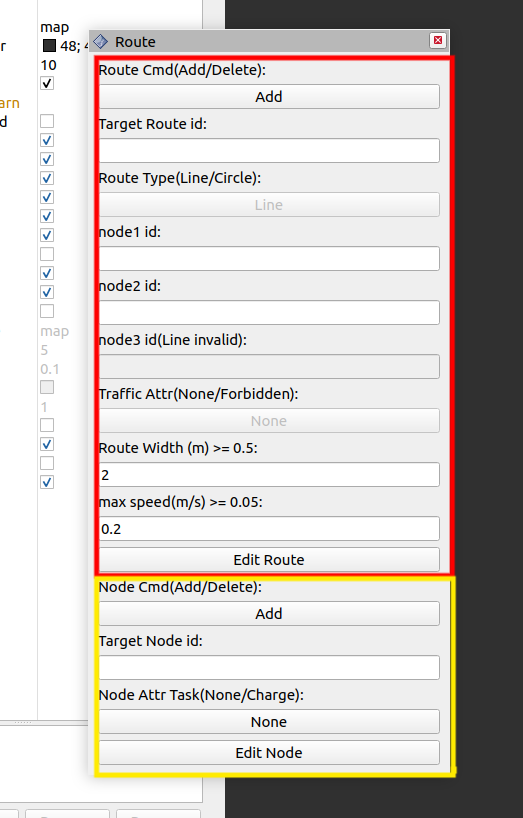
1、设置编辑命令,点击“Node Cmd(Add/Delete)”下方按钮,按钮显示会在“Add”和“Delete”之间切换,显示值即为当前命令状态;注意:当命令为“Add”时节点 ID 已存在时,会覆盖原来节点信息;
2、设置编辑的节点 ID,在“Target Node id:”下方输入框内输入节点 ID(>=0),当编辑完一个节点后,输入框内 ID 编号会自动+1,如果显示值与目标值一致则无需更改;
3、设置节点任务属性, 点击 “Node Attr Task( None/Charge )” 下方按钮 ,按钮显示会在“None“ 和“Charge”之间切换,同样显示值即为当前属性状态;
4、当设置完以上三项且确认机器人开到目标位姿后,点击“Edit Node”按钮,命令执行完后会弹出一条消息框,提示当前命令执行状态,阅读确认后请关闭消息框。

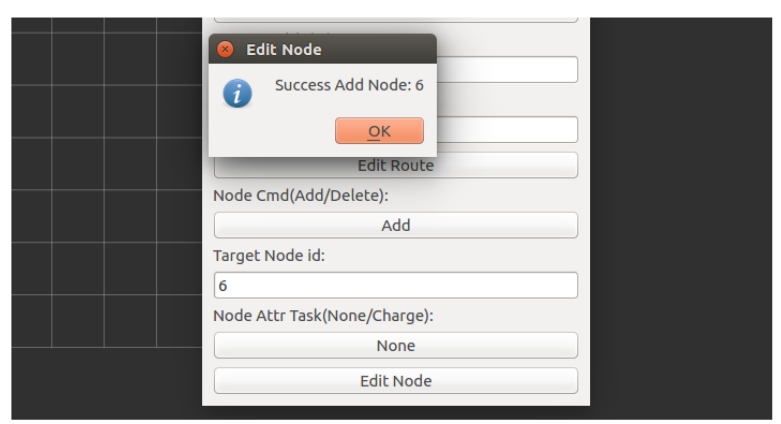
添加路径点示例

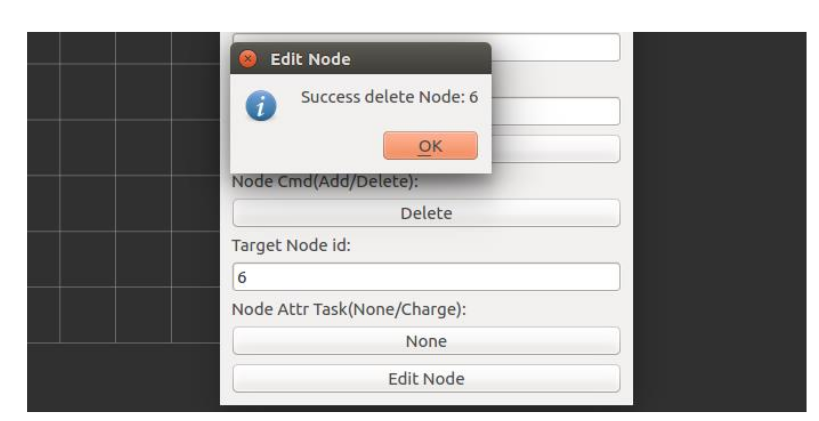
删除路径点示例
使用代码操作
- 调用 /srv_edit_node 服务增加还是删除路径点
rosservice call /srv_edit_node "{cmd: '', id_node: 0, attr_task: '', x: 0.0, y: 0.0, theta: 0.0}"
增加或删除道路点使用说明,在 cmd 中输入 Add 或 Delete 选择此次是增加还是删除路径点,在 id_node 中输入此次操作的 id ,在 attr_task 部分可选择默认,在 x: 0.0, y: 0.0, theta: 0.0 中输入此次操作路径点的位置,以下是示例以及操作成功的提示(红色部分为路径点添加示例,黄色部分为添加成功示例):

1.3.2 路径设置
- 路径点设置完成以后,需要将路径点相连形成道路(即机器人可行使区域)
界面操作
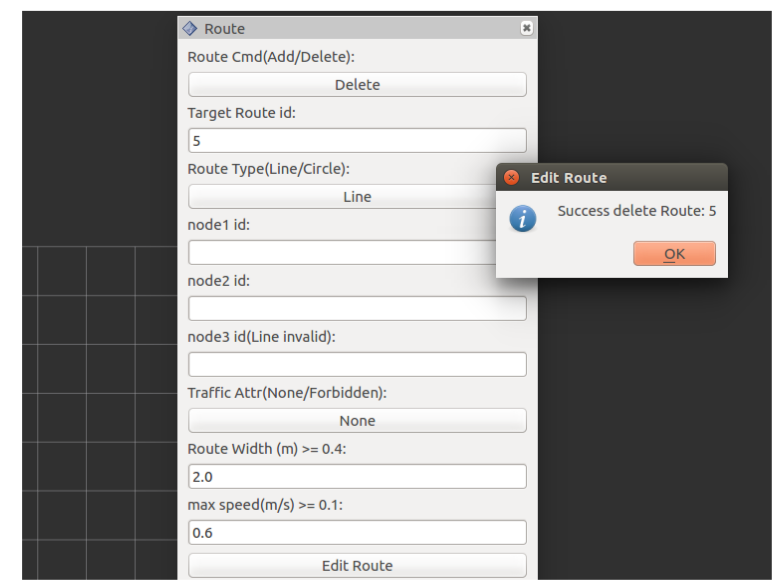
1、设置编辑命令,点击“Route Cmd(Add/Delete)”下方按钮,按钮显示会在“Add”和“Delete”之间切换,显示值即为当前命令状态;注意:当命令为“Add”时道路 ID 已存在,则覆盖原来道路信息;
2、设置编辑道路 ID,点击“Target Route id:”下方输入框内输入想要编辑的道路 ID,当编辑完一个道路后,输入框内 ID 编号会自动+1,如果显示值与目标值一致则无需更改;
3、设置道路形状属性,点击“Route Type( Line/Circle):”下方按钮,按钮显示会在 “Line”和“Circle”之间切换,显示值即为当前属性;
4、输入组成道路的节点 ID,分别在“node1 id:”、“node2 id:”和“node3 id:”输入栏中输入相应 ID 值。注意:当命令为“Delete”时,此处设置无效,可以不填;当命令为“Add”,形状属性为“Line”时,1 和 2 分别为直线起点和终点 ID,3 可以缺省;当命令为“Add”,形状属性为“Circle”时,1 和 3 为圆弧起点和终点, 2 为圆弧上其它任意一点(建议选在圆弧中间附近)
5、设置编辑道路属性,点击“Traffic Attribute(None/Forbidden)”下方按钮,按钮显示值会在“None”和“Forbidden”之间切换,显示值即为当前属性值;
6、设置道路宽度,在“Route Width(m) >= 0.4:”下方输入框内输入道路宽度,单位:m,输入数值必须>=0.4(当数值小于 0.4 时会弹出错误提示框,请关闭提示框后输入有效值);
7、设置道路上机器人最大速度,在“max speed(m/s) >= 0.1:”下方输入框内输入机器人在该道路段最大速度,单位:m/s,输入值必须>=0.1(当数值小于 0.1 时会弹出错误提示框,请关闭提示框后输入有效值);
8、确认以上步骤的设置无误后,点击按钮“Edit Route”,命令执行完会弹出一条消息框,提示当前命令执行状态,阅读确认后请关闭消息框。
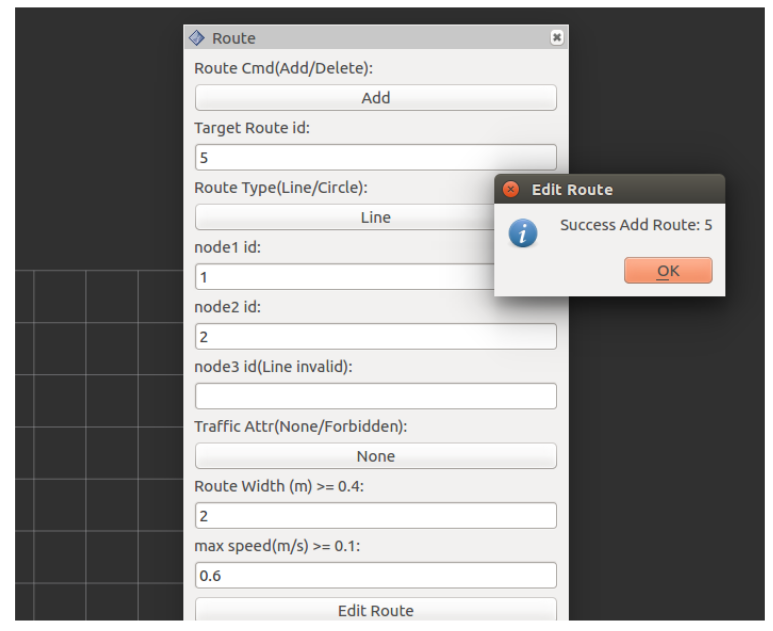
示例:增加道路 5:起点->1,终点->2,通行状态->正常,道路宽度->2.0m,最大速度->0.6m/s,则编辑框和消息提示框如图
删除道路示例
道路宽度说明:道路生成以后可以为其设置道路宽度。例如在道路点2与道路点3之间生成一条路径,可以为该路径设置宽度与最大速度,即在建立道路时在 Route Width 中设置道路宽度(可根据实际宽度设置),在RVIZ中看到的蓝色线为道路中心线,道路宽度则在该中心线两边各平分一半,道路边界是虚拟的,不会显示出来。假设该道路宽度为2m,即在蓝色线两边各延伸1米。
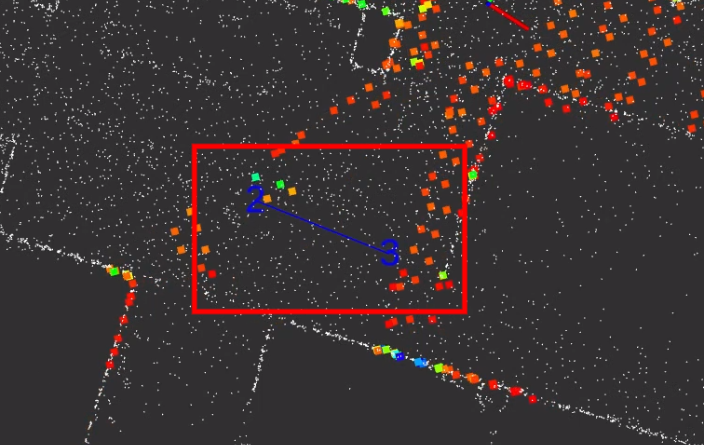
道路最大速度说明:道路生成以后可以为其设置最大速度,即限制当前道路机器人的速度。例如设置最大速度为 0.6m/s, 则导航时,机器人在该道路上的最大速度就不会操作 0.6m/s。
另外限制机器人的最大速度有两部分,第一部分为道路限速,第二部分为机器人配置文件(src/hr_nav_controller/00_contoller/dx_chassis_manager/cfg/leju_03/params_motion_control.yaml)限速,两则限速取最低。例如道路限速为 0.6m/s,机器人配置文件限速为 0.4m/s, 则在行使时的最大速度则为 0.4m/s,总之机器人的最终速度取决于两则最低速度。
代码操作
- 调用 /srv_edit_route 服务增加还是删除路径
rosservice call /srv_edit_route "{cmd: '', id_route: 0, type_route: '', id_node1: 0, id_node2: 0, id_node3: 0, attr_traffic: '',
width: 0.0, max_speed: 0.0}"
增加或删除道路使用说明,在 cmd 中输入 Add 或 Delete 选择此次是增加还是删除路径,在 id_node1 与 id_node2 中输入此次操作的 id ,id_node3不输入任何值,在 attr_traffic 部分可选择默认,在 width 中输入当前路径的宽度,在 max_speed 中输入当前道路的最大速度,以下是示例以及操作成功的提示:

1.4 任务点设置步骤
- 可以通过设置任务点让机器人到达指定位置完成指定任务
界面操作
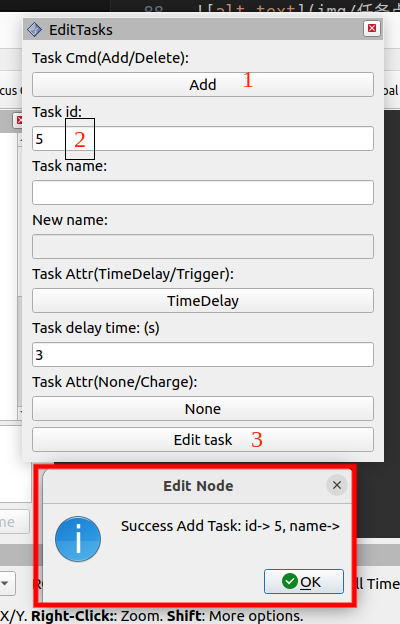
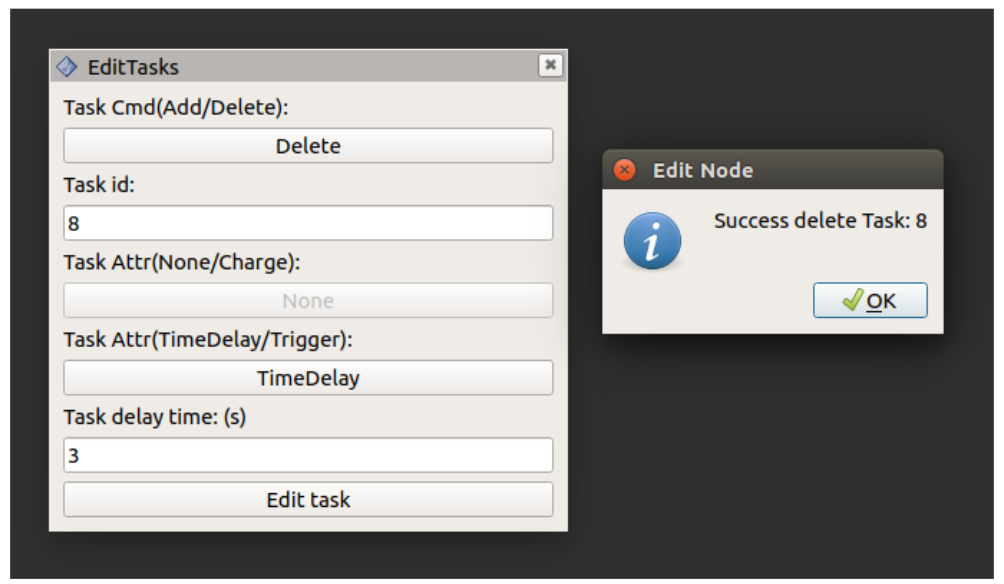
在RVIZ界面左上角点击 panels -> add new panel -> EditTasks 然后点击右下方“OK”,在 Rviz 左侧列表中将出现“EditTasks”插件,如果需要挪动“EditTasks”插件位置,可以鼠标光标放置在插件上方灰色区域。单击鼠标左键拖动到任意位置。进入任务点编辑界面
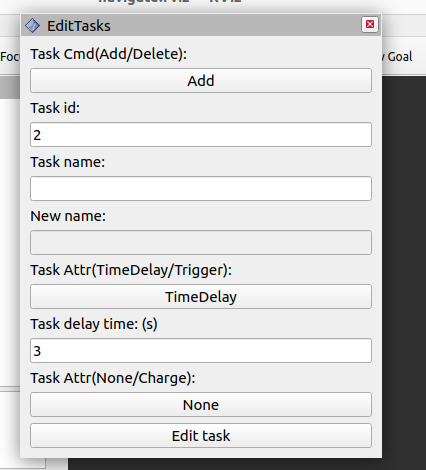
1、设置编辑命令,点击“Task Cmd(Add/Delete)”下方按钮,按钮显示会在“Add”和“Delete”之间切换,显示值即为当前命令状态;注意:当命令为“Add”时节点 ID 已存在时,会覆盖原来节点信息;
2、设置编辑的任务 ID,在“Task id:”下方输入框内输入节点 ID(>=0),当编辑完一个节点后,输入框内 ID 编号会自动+1,如果显示值与目标值一致则无需更改;
3、设置节点任务属性,点击“Task Attr(None/Charge)”下方按钮,按钮显示会在“None“ 和“Charge”之间切换,同样显示值即为当前属性状态;
4、当设置完 a.b.c 三项且确认机器人开到目标位姿后,点击“Edit Node”按钮,命令执行完后会弹出一条消息框,提示当前命令执行状态,阅读确认后请关闭消息框。
删除任务点与重命名任务点上述操作相似
代码操作
- 调用 /srv_edit_task 服务增加、删除、重命名任务点
rosservice call /srv_edit_task "{cmd: '', name_task: '', id_task: 0, attr_task: '', name_new: '', time_delay: 0.0,
x: 0.0, y: 0.0, theta: 0.0}"
增加或删除道路使用说明,在 cmd 中输入 Add 或 Delete 或在 ReName 选择此次是增加、删除还是重命名任务点,在 id_task 中输入此次操作的 id ,在 x: 0.0, y: 0.0, theta: 0.0 中输入任务点坐标,其他均可选择默认,以下是示例以及操作成功的提示:

2、导航
- 注意:导航目标点和当前点必须在道路网范围内
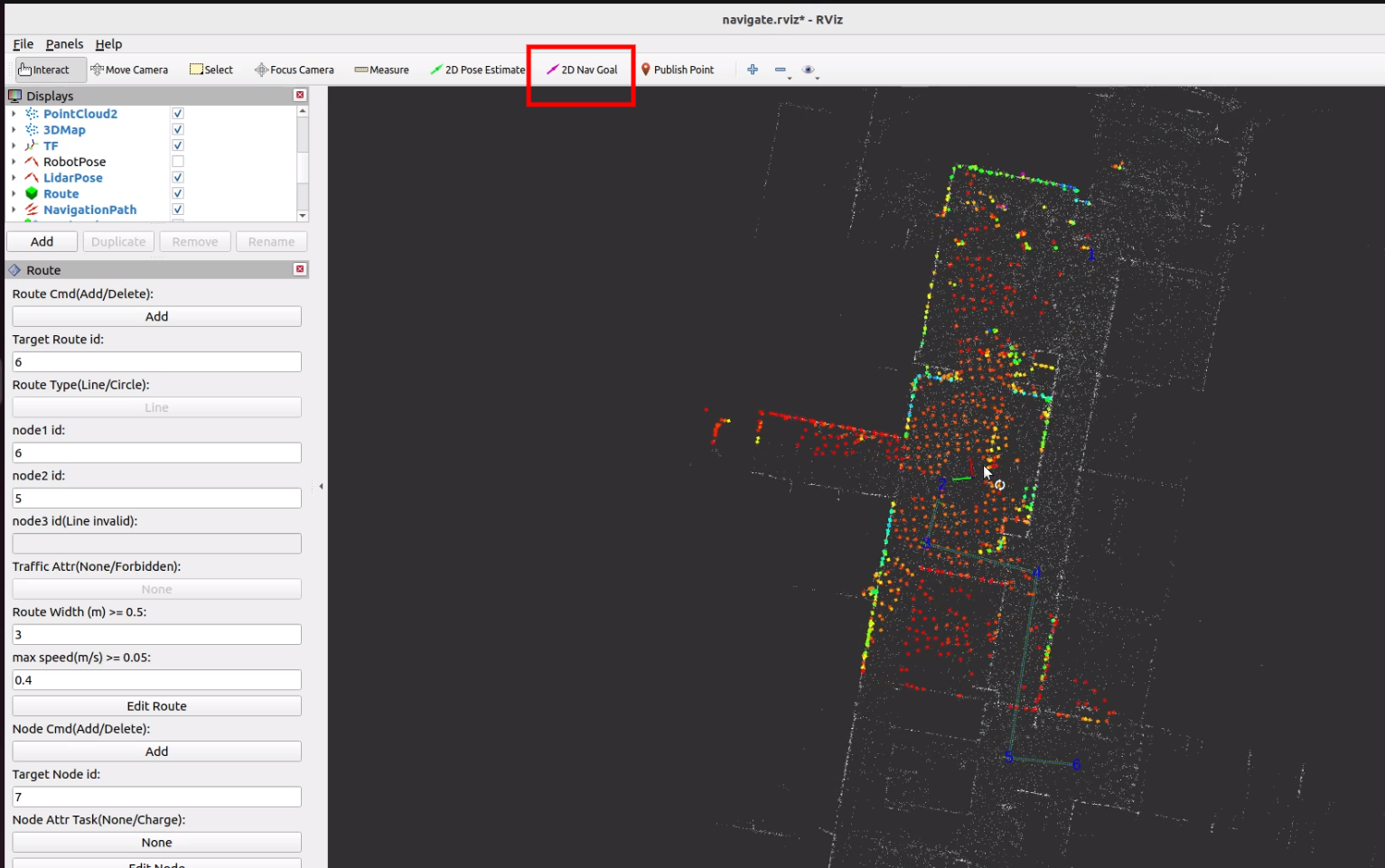
2.1 RVIZ 界面导航
在 RVIZ 界面中 使用 2D nav Goal 完成目标点设置,目标点设置完成以后就会出现路径规划(即绿色的线)

2.2 任务点导航
界面操作
任务点设置完成以后,可以在界面中导航去对应的任务点,即在 manualtask 中选择要去的任务点,选择完成以后机器人就会导航到该位置。
代码操作
- 调用 /srv_set_task 服务增加、删除、重命名任务点
rosservice call /srv_edit_task "{cmd: '', name_task: '', id_task: 0, attr_task: '', name_new: '', time_delay: 0.0,
x: 0.0, y: 0.0, theta: 0.0}"
导航接口说明手册
1、地图功能
1.1 建图及地图管理指令
功能: 建立三维地图
名称: /srv_mapping
格式: dx_nav_common/MappingSrv
MappingSrv.srv 定义
| 类别 | 格式 | 名称 | 说明 |
|---|---|---|---|
| Request | string | cmd_attr | 命令(Map/MapAndRecord/Record/Cancel/Save/Delete),Map—建图,MapAndRecord—建图同时录数据,Record—录数据,Cancel—取消建图/录数据,Save—保存(结束)建图/录数据,Delete—删除地图 |
| string | map_dir | 地图名称 | |
| string | bag_name | 数据名称(缺省则用时间命名) | |
| float32 | map_resolution | 地图分辨率/m | |
| Response | string | cmd_res | 返回 server 接收到的命令 |
| int32 | state_execute | 命令执行状态 | |
| string | map | 地图名称 | |
| string | bag | bag 数据名称 | |
| string | info | 反馈信息 |
1.2 地图信息显示
- 实时地图输出
- 名称:
/map_3d - 格式:
sensor_msgs::PointCloud2
- 名称:
- 实时 2D 地图输出
- 名称:
/map_2d - 格式:
nav_msgs::OccupancyGrid
- 名称:
- 匹配点云输出
- 名称:
/lidar_pts_matched - 格式:
sensor_msgs::PointCloud2
- 名称:
- 机器人实时位姿
- 名称:
/fuse_pose_lidar_link - 格式:
nav_msgs::Odometry
- 名称:
1.3 机器人地图文件及列表获取
1.3.1 地图文件
地图文件存储路径:~/maps/map_name
- 地图点云:
map.pcd - 建图轨迹点云:
trajectory.pcd - 2D 地图图片:
map_2d.pgm - 2D 地图解析文件:
map_2d.yaml(注意内含map_2d.pgm的绝对路径)
如果有录数据包:***.bag
1.3.2 获取地图列表
功能: 获取机器人地图列表信息
名称: /map_lists
格式: dx_nav_common/MapLists
MapLists.msg 定义
| 格式 | 名称 | 说明 |
|---|---|---|
| Header | header | 消息头 |
| string[] | maps | 地图列表:其中信息为地图名称 map_name;地图完整路径为基础路径:/home/user_name/maps/ + map_name;“/”表示基础路径 |
1.4 数据包离线建图
启动建图程序,
test改成自己的地图名roslaunch hr_slam sim_mapping.launch map_dir:=/home/robodriver/maps/test播放 rosbag
rosbag play --clock *.bag保存地图
rosservice call /srv_save_map "data: true"如果返回:
success: True
message: ''说明保存 3D 地图成功
3D 地图转换为 2d 地图
roslaunch dx_chassis_manager pcd_to_map_2d.launch map_dir:=/home/robodriver/maps/test生成
map_2d.pgm和map_2d.yaml
1.5 切换当前使用地图
功能: 初始化机器人位姿
名称: /srv_set_params
格式: dx_nav_common/SetParamsSrv
SetParamsSrv.srv 定义
| 类别 | 格式 | 名称 | 说明 |
|---|---|---|---|
| Request | string | map_dir | 使用地图文件夹地址 |
| float32 | vel_max_linear | 机器人最大线速度,单位:m/s | |
| float32 | vel_max_angular | 机器人最大角速度,单位:rad/s | |
| string | method_nav | 导航方法(暂未开启) | |
| string | method_obstacle_avoid | 避障方法 (Stop/Detour/None),Stop—停止,Detour—绕障,None—忽略障碍物 | |
| Response | string | cur_map_dir | 当前值 |
| float32 | cur_vel_max_linear | 当前值 | |
| float32 | cur_vel_max_angular | 当前值 | |
| string | cur_method_nav | 当前值 | |
| string | cur_method_obstacle_avoid | 当前值 | |
| string | info | 反馈信息 |
rosservice call /srv_set_params "{map_dir: 'map_name', vel_max_linear: 0.0, vel_max_angular: 0.0, method_nav: '', method_obstacle_avoid: ''}"
2、定位功能
2.1 初始化定位
2.1.1 初始化定位指令
功能: 初始化机器人位姿
名称: /init_pose
格式: dx_nav_common/InitPose
InitPose.msg 定义
| 格式 | 名称 | 说明 |
|---|---|---|
| string | method | 初始化方法(Manual/RTK/GPS/Station),Manual—手动初始化,RTK—使用RTK初始化,GPS—使用GPS初始化,Station—使用地图任务点初始化 |
| Pose3D | pose | 初始化位姿,手动时有效(格式详见下表) |
| int32 | station_id | 节点ID,使用Station初始化时有效 |
| string | station_name | 站点名称,使用Station初始化时有效且station_id <= 0 时候有效 |
Pose3D.msg 定义
| 格式 | 名称 | 说明 |
|---|---|---|
| float32 | x | 3D 位姿:x/y/z – 位置,单位:m;roll/pitch/yaw – 姿态,单位: rad |
| float32 | y | |
| float32 | z | |
| float32 | roll | |
| float32 | pitch | |
| float32 | yaw |
2.1.2 使用 Rviz 初始化
说明:绿色建图的根部表示机器人的位置,箭头朝向代表机器人的方向。

2.2 定位实时信息显示
- 实时地图输出
- 名称:
/map_3d - 格式:
sensor_msgs::PointCloud2
- 名称:
- 实时 2D 地图输出
- 名称:
/map_2d - 格式:
nav_msgs::OccupancyGrid
- 名称:
- 匹配点云输出
- 名称:
/lidar_pts_matched - 格式:
sensor_msgs::PointCloud2
- 名称:
- 实时位姿输出
- 名称:
/fuse_pose_lidar_link - 格式:
nav_msgs::Odometry - 频率: 100~110hz
- 名称:
2.3 定位状态
功能: 机器人定位状态
名称: /state_location
格式: std_msgs::Int32 (0 – None, 1 – Success, 2 – Localizing, 3 – Failure)
2.4 关闭初始化定位
功能: 关闭初始化定位
名称: /ignore_init_location
格式: std_msgs::Bool (true – 关闭初始化定位,false – 打开初始化定位)
3、 路径编辑
导航采用基于道路的搜索方式,道路包含连通关系(节点之间的连通)、道路宽度、道路最大限速、通行状态(正常/禁止通行)。编辑道路主要分为两个步骤:节点编辑和道路属性编辑。
道路、节点和任务点都可以进行增加和删除操作,当新增节点/道路/任务点ID与旧的相同时会对旧的站点/道路/任务点进行覆盖。
3.1 节点编辑
3.1.1 编辑节点
功能: 编辑节点
名称: /srv_edit_node
格式: dx_nav_common/EditNode
EditNode.srv 定义
| 类别 | 格式 | 名称 | 说明 |
|---|---|---|---|
| Request | string | cmd | 命令(Add/Delete),Add—增加节点,如果该节点已存在(id_node相同)则覆盖;Delete—删除节点 |
| int32 | id_node | 节点ID编号(当数值<=0时,编辑器会从上一个编辑节点的ID往后查找,返回第一个未使用的ID) | |
| string | attr_task | 节点属性(None/Charge),None—普通节点,Charge—充电节点 | |
| float32 | x | 节点的x坐标值(删除节点时可缺省),单位:m | |
| float32 | y | 节点的y坐标值(删除节点时可缺省),单位:m | |
| float32 | theta | 节点的theta角度(删除节点时可缺省),单位:rad | |
| Response | string | cmd_res | 返回server接收到的命令 |
| int32 | state | 当>=0时,返回编辑节点的id;-1 –表示编辑节点失败 | |
| string | info | 反馈信息 |
3.1.2 使用图像像素编辑节点
名称: /srv_edit_node_from_pixel
格式: dx_nav_common/EditNode
3.2 道路编辑
功能: 编辑节点
名称: /srv_edit_route
格式: dx_nav_common/EditRoute
EditRoute.srv 定义
| 类别 | 格式 | 名称 | 说明 |
|---|---|---|---|
| Request | string | cmd | 命令(Add/Delete),Add—增加节点,如果该节点已存在(id_node相同)则覆盖;Delete—删除节点 |
| int32 | id_route | 道路ID编号(当数值<=0时,编辑器会从上一个编辑道路的ID往后查找,返回第一个未使用的ID) | |
| string | type_route | 道路形状属性(Line/Circle),Line—直线道路,需要两个节点(id_node1和id_node2有效);Circle—圆弧道路,需要三个节点都有效 | |
| int32 | id_node1 | 道路起始节点ID编号(>=0) | |
| int32 | id_node2 | 直线道路时终止节点ID编号,圆弧道路时的中间节点编号(>=0) | |
| int32 | id_node3 | 圆弧道路的终止节点编号,(>=0) | |
| string | attr_traffic | 道路通行属性(None/Forbidden),None—正常道路,Forbidden—道路禁止通行 | |
| float32 | width | 道路宽度,单位:m | |
| float32 | max_speed | 道路最大通行速度,单位:m/s | |
| Response | string | cmd_res | 返回server接收到的命令 |
| int32 | state | 当>=0时,返回编辑道路的id;<0表示编辑失败:-1/-2/-3分别表示,id_node无效(不存在),-4—无效的宽度(负值或小于最小有效值0.4),-5—无效的最大速度(负值或小于最小有效值0.1) | |
| string | info | 反馈信息 |
3.3 当前道路信息
名称: /routes_stations
格式: dx_nav_common/RoutesAndStations
4、任务点编辑和测试
任务点为机器人要去执行任务的位姿点,包含任务点ID、任务属性(是否充电)、停顿时间(任务执行完到执行下一个任务间隔时间,负值表示下一个任务是事件触发机制)。
注意:任务点要部署在道路宽度范围内!否则无法规划和自主导航到达。
4.1 任务点编辑
4.1.1 编辑任务点
功能: 编辑任务点
名称: /srv_edit_task
格式: dx_nav_common/EditTask
EditTask.srv 定义
| 类别 | 格式 | 名称 | 说明 |
|---|---|---|---|
| Request | string | cmd | 命令 (Add/ReName/Delete),Add—增加任务,如果该任务已存在(id_node相同)则覆盖;ReName—重命名;Delete—删除任务 |
| string | name_task | 任务点名称:用来标记和查找任务点,可以缺省(缺省时不能使用名称查找任务) | |
| int32 | id_task | 任务点ID编号(当数值<=0时,编辑器会从上一个编辑任务点的ID往后查找,返回第一个未使用的ID) | |
| string | name_new | 修改后的新名称 | |
| string | attr_task | 任务点属性(None/Charge),None—普通任务点,Charge—充电任务点 | |
| float32 | time_delay | 底盘执行任务后等待时间,单位:s,如果为负值,表示执行下个任务是触发机制,机器人将一直等待直至下一个任务下发 | |
| float32 | x | 任务点的x坐标值(删除节点时可缺省),单位:m | |
| float32 | y | 任务点的y坐标值(删除节点时可缺省),单位:m | |
| float32 | theta | 任务点的theta角度(删除节点时可缺省),单位:rad | |
| Response | string | cmd_res | 返回server接收到的命令 |
| int32 | state | 当>=0时,返回编辑任务点的id;-1 –表示编辑节点失败 | |
| string | info | 反馈信息 |
4.1.2 使用图像像素编辑节点
名称: /srv_edit_task_from_pixel
格式: dx_nav_common/EditTask
4.2 当前地图任务点列表
功能: 当前地图任务点列表
名称: /task_nodes
格式: dx_nav_common/TaskNodes
TaskNodes.msg 定义
| 格式 | 名称 | 说明 |
|---|---|---|
| Header | header | 消息头 |
| TaskInfo[] | tasks | 当前地图任务列表,TaskInfo信息详见上表 |
5、导航功能
注意:导航目标点和当前点必须在道路网范围内。
5.1 导航输出
5.1.1 规划路径输出
名称: /route_plan_pose_array
格式: geometry_msgs::PoseArray
5.1.2 控制指令输出
名称: /cmd_vel_nav
格式: geometry_msgs::Twist
频率: 约100hz
5.1.3 障碍物状态输出
名称: /state_obstacle
格式: dx_nav_common::ObstaclesState(自定义格式)
5.2 任务点导航
功能: 发布/取消任务点
名称: /srv_set_task
格式: dx_nav_common/SetTaskSrv
SetTaskSrv.srv 定义
| 类别 | 格式 | 名称 | 说明 |
|---|---|---|---|
| Request | string | cmd_attr | 命令(New/Cancel),New—发布一个新的任务点,Cancel—取消任务点 |
| string | task_attr | 任务类型(None/Charge),None—普通任务,Charge—充电任务 | |
| int32 | task_id | 任务ID:当ID > 0时有效;当ID<=0时无效,此时使用pose_task信息 | |
| Pose3D | pose_task | 任务点位姿(格式见上表) | |
| Response | string | cmd_res | 返回server接收到的命令 |
| int32 | state_execute | 命令执行状态: 1—机器人当前位姿未知;2—当前位姿不在道路内;3—目标位姿不在道路内 | |
| string | info | 反馈信息 |