▶️ 仿真平台使用
案例概述
本案例介绍基于Kuavo_data_challenge仓库和对应的数据集实现乐聚夸父机器人双臂物体抓取放置任务。案例提供基于Diffusion Policy实现对乐聚夸父机器人双臂操作的仿真部署,介绍如何使用Kuavo_data_challenge仓库配置环境,模型训练和mujoco仿真部署。
效果展示
- 任务1:传送带抓取放置。评判抓取效果请参照双臂抓取4个任务的评分标准
使用教程
1. 代码仓库下载 + 环境配置
本案例需要配置两个代码仓库,并启动两个进程(仿真侧,推理侧)协同工作。推理侧用于模型推理(启动模仿学习模型),仿真测用于接受推理结果与环境交互并评分(启动mujuco仿真节点接受模型推理结果)。
- 推理侧:需要配置好python环境,推荐使用conda。可参考官方文档说明:kuavo_data_challenage的Python环境配置
- 仿真侧:需要安装并启动对应的docker环境,以模拟下位机ros环境启动mujuco节点。可参考官方文档说明:kuavo-ros-opensource环境配置。
同时还配套了视频教程:安装训练指南 — 赛事手册 文档。
请按照说明文档配置对应环境,以下教程默认环境配置成功。
PS: kuavo_data_challenge(推理侧)环境配置缺少部分包,会影响模型推理脚本的启动。解决方法如下,按需安装
conda activate kdc
# 如果报错缺少kuavo_humanoid_sdk模块,降低版本,因为最新版本可能不兼容
pip install kuavo_humanoid_sdk==1.2.1
# 如果报错缺少deprecated,则安装。
pip install deprecated
# 如果报错缺少apriltag_ros,则安装。若使用ROS Noetic + python3可以按照以下方式安装
sudo apt update
sudo apt install ros-noetic-apriltag-ros
2. 仿真运行
⚠️ 注意: 本案例需要同时启动两个进程(两个终端),推理侧用于启动模仿学习模型,仿真侧用于启动mujuco节点。
(1) 启动仿真侧进程
在第一个终端中启动kuavo-ros-opensource仿真环境,运行脚本打开节点:
cd kuavo-ros-opensource
./docker/run_with_gpu.sh kuavo_opensource_mpc_wbc_img:0.6.1 # 启动容器
# 进入容器中kuavo_ws路径下
export ROBOT_VERSION=45
source devel/setup.zsh
# 启动仿真侧mujoco进程,选择任务1
python3 src/data_challenge_simulator/examples/deploy/deploy.py
(2) 推理侧配置模型config配置文件
- 第一步:下载demo模型
本案例提供了一个简单的Diffusion Policy模仿学习模型,模型文件较大需要额外下载并放到指定路径中。模型文件下载:模型文件1,模型文件2。两个模型文件构成一个模仿学习模型,放到kuavo_data_challenge/outputs/train/task1_demo/diffusion/run_demo/epochdemo中(需要自己新建文件夹)
- 第二步:下载轨迹数据
推理时需要提供bag包的完整路径,如:到达预抓取姿态等,可直接拷贝一个训练用rosbags控制。案例提供一条数据:任务1抓取任务rosbag数据下载。放到kuavo_data_challenge/rosbag_data/TASK1-TargetPlacement(需要自己新建文件夹)
- 第三步:修改仿真配置文件
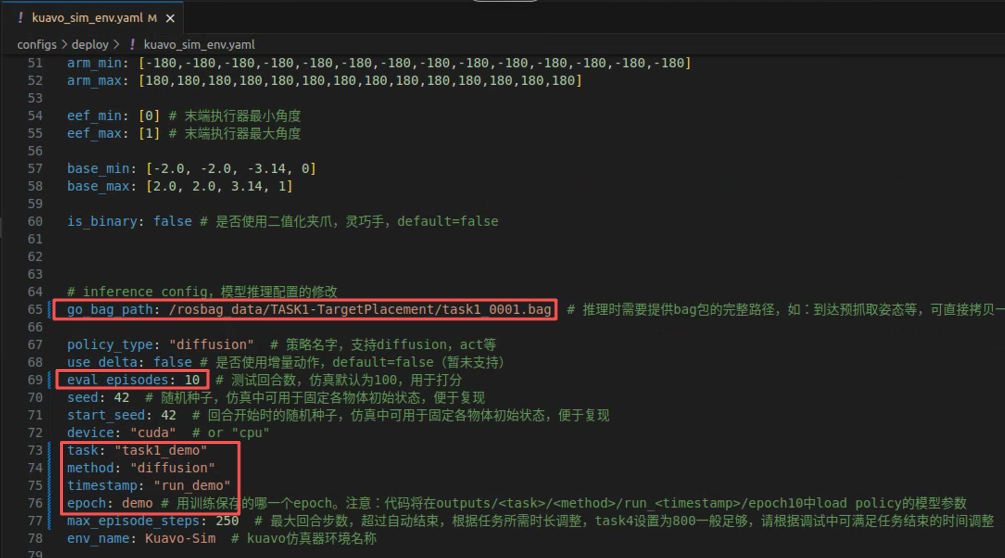
修改kuavo_data_challenge/configs/deploy/kuavo_sim_env.yaml中65-78行的模型接口,使用案例提供的demo模型和50条开源rosbags数据集。如下所示:
go_bag_path: /rosbag_data/TASK1-TargetPlacement/task1_0001.bag # 推理时需要提供bag包的完整路径。
policy_type: "diffusion" # demo模型是diffusion policy
eval_episodes: 10 # 推理评估回合数用于打分
task: "task1_demo" # 训练模型自定义的任务名称
method: "diffusion"
timestamp: "run_demo"
epoch: demo
(3) 启动推理侧进程
新建一个终端,按照以下命令启动。
cd kuavo_data_challenge
conda activate kdc
# 方法1:直接运行自动测试脚本(推荐方式)
python kuavo_deploy/examples/scripts/script_auto_test.py --task auto_test --config configs/deploy/kuavo_sim_env.yaml
# 方法2:按照教程运行总脚本文件,再选择命令
bash kuavo_deploy/eval_kuavo.sh
# 运行后选择3,进一步选择示例,配置文件路径为configs/deploy/kuavo_sim_env.yaml(仿真),随后选择自己需要进行的脚本。具体命令功能查看kdc仓库文档说明。
方法2是启动交互式页面,功能较多,可以参照kdc交互页面概览自行研究。本案例只针对启动仿真的功能,推荐使用方法1。
PS:仿真侧下运行的程序如果报错,报错记录会存在Kuavo_data_challenge/log中,可以查阅自行debug。
(4) 启动rqt_image_view查看摄像头话题
# roscore启动后新开终端输入, 选择对应摄像头话题可查看
rqt_image_view
| 仿真环境话题名 | 功能说明 |
|---|---|
| /cam_h/color/image_raw/compressed | 上方相机 RGB 彩色图像 |
| /cam_h/depth/image_raw/compressedDepth | 上方相机深度图 |
| /cam_l/color/image_raw/compressed | 左侧相机 RGB 彩色图像 |
| /cam_l/depth/image_rect_raw/compressedDepth | 左侧相机深度图 |
| /cam_r/color/image_raw/compressed | 右侧相机 RGB 彩色图像 |
| /cam_r/depth/image_rect_raw/compressedDepth | 右侧相机深度图 |
| /gripper/command | 仿真 rq2f85 夹爪控制命令 |
| /gripper/state | 仿真 rq2f85 夹爪当前状态 |
| /joint_cmd | 所有关节控制指令(含腿部) |
| /kuavo_arm_traj | 机器人机械臂轨迹控制 |
| /sensors_data_raw | 所有传感器原始数据 |
3. 模仿学习模型训练流程(可选)
kuavo_data_challenage仓库内文档有阐述详细的训练过程:kdc模仿学习模型训练总流程,可以自行训练模型。训练所需仿真数据可以在乐聚天池比赛开源数据集下载。
Huggingface数据集下载相关
方法1:使用hf工具下载
参考官方文档配置hf,使用hf download xxx/xxx --repo_type dataset下载。下载前要进行token的配置,参考官方文档自定义一个token。
如果要下载数据集里个别文件或文件夹,可以使用--include参数:
# 下载我们kdc的数据库中TASK1的数据,--include标注路径 *表示目录下所有文件,--local-dir表示存放位置
hf download LejuRobotics/kuavo_data_challenge \
--repo-type dataset \
--include "sim/TASK1-TargetPlacement/*" \
--local-dir "替换成保存路径"
方法2:使用hfd工具下载(推荐国内用户)
国内下载huggingface模型或数据集用hf工具比较慢,依赖代理速度。推荐使用多线程工具专用多线程下载器 hfd,可以参考网络上的文档教程配置。下载完成hfd.sh脚本后,运行以下代码:
./hfd.sh LejuRobotics/kuavo_data_challenge \
--include "sim/TASK1-TargetPlacement/*" \
--local-dir "替换成保存路径" \
--tool aria2c \
--dataset
# 若提示没有权限下载需要token,参考上面hf的token配置,将自己的token导入到环境变量里
export HF_USERNAME="你的huggingface用户名"
export HF_TOKEN="你的token"