KUAVO人形机器人训练场(科研版)案例概述
声明
- ⚠️⚠️⚠️ 注意: 该案例仅向选配训练场方案用户开放
- 产品名称:KUAVO人形机器人训练场(科研版)
- 产品定位:构建开箱即用的科研训练场,助力高校、实验室人形机器人具身科研与应用开发
- 核心平台:乐聚人形机器人平台(**KUAVO-4PRO** **&** **KUAVO-LB**)
一、概述
KUAVO人形机器人训练场(科研版) 是一款专为科研机构与高校实验室设计的综合解决方案,集成了具身智能本体 (KUAVO-4PRO & KUAVO-LB)、数据采集工具链以及模型训练与部署套件。通过本方案,用户可轻松实现从数据采集到模型训练到模型部署的全链条闭环,助力人形机器人具身智能科研与应用开发。
二、架构与核心优势
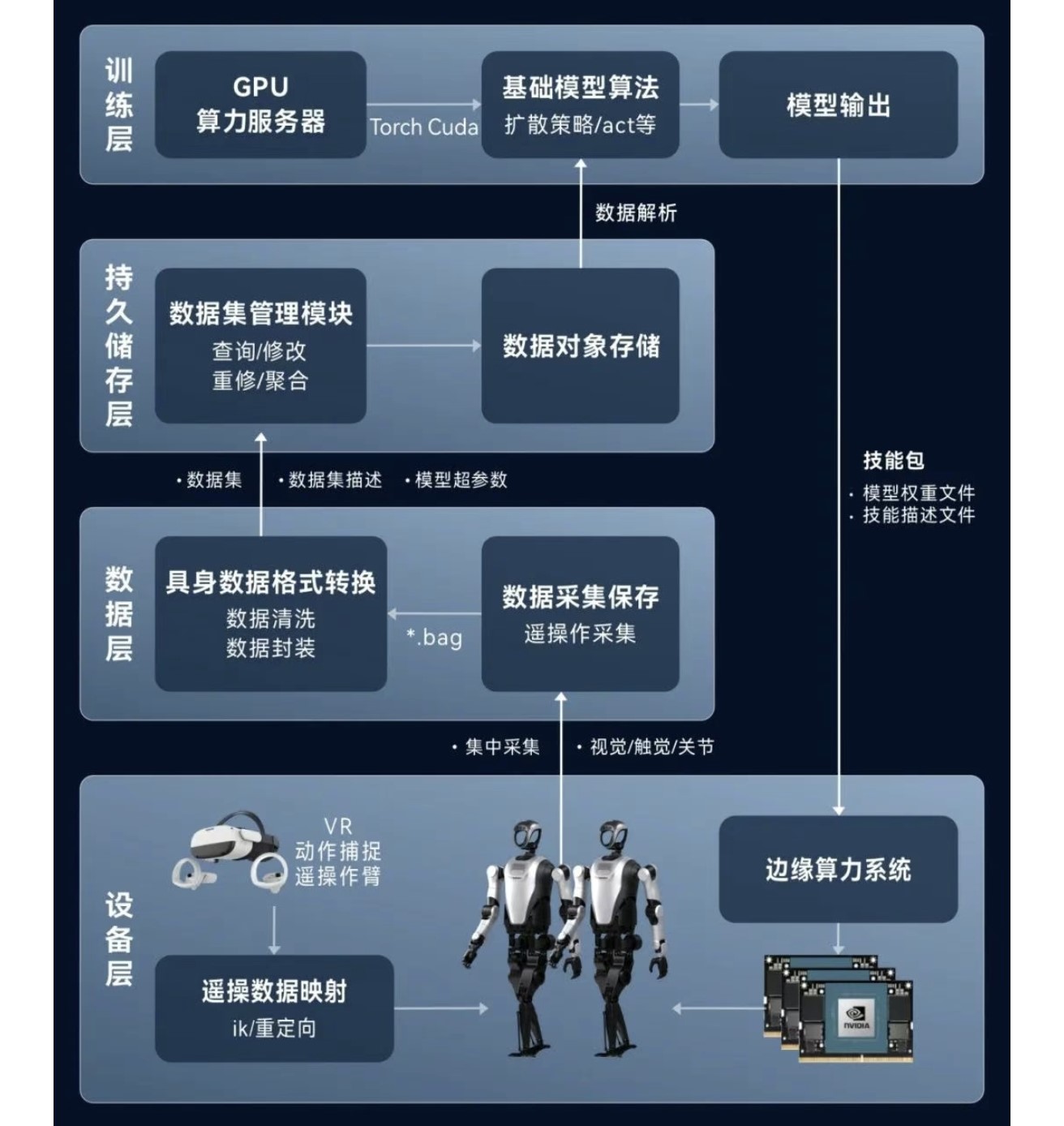
1. 架构
- 具身智能本体:KUAVO-4PRO 或 KUAVO-LB 人形平台,作为数据采集与模型部署的物理载体,适配多场景应用。
- 数据采集平台:覆盖数据采集全流程,从采集任务创建、采集配置、数据上传、数据导出、数据筛选,数据转换、数据管理,一站式解决数据获取难题。
- 模型训练与部署:搭载 NVIDIA Jetson AGX Orin 开发套件(算力高达 275 TOPS);提供高算力训练平台,支持边缘侧高效训练与部署,加速科研成果落地。
三者关系
具身智能本体负责采集真实场景数据;数据采集平台对数据进行标准化处理;模型训练与部署套件基于处理后的数据进行模型训练;并将训练好的模型重新部署至本体上。形成数据到模型的全链条闭环。
2. 核心优势
- 高性能具身智能本体:KUAVO-4PRO 与 KUAVO-LB 人形平台,提供物理执行能力与算力支持,满足多样化科研需求。
- 完善的数据采集平台:从数据采集到存储到数据标准化处理,全流程自动化处理,降低数据获取门槛,统一数据标准。
- 丰富的训练方案:提供多种预训练模型与训练框架,支持用户自定义训练任务,加速科研探索。
三、核心目标
1. 降低具身智能开发门槛
- 实现路径:通过完善的工具链,用户无需专业编程技能,即可完成数据采集转化、训练、部署全流程,助力开发具身智能模型。

2. 统一数据标准
- 实现路径:工具链内置数据标准化模块,确保采集数据的一致性与可复用性,打通本体、数据、训练、模型边界。
3.整合具身开发工具
- 实现路径:提供一站式开发平台,减少重复造轮子,驱动科研成果高效转化,加速具身智能科研进程。
四、组件详解
1. 具身智能本体
- KUAVO-4PRO 和 KUAVO-LB:双平台支持,支持多场景应用,满足复杂任务执行需求。
- 应用场景:工业巡检、服务机器人、科研实验等。
| 产品名称 | 简介 | 了解更多 |
|---|---|---|
| KUAVO 4PRO | 高性能具身本体,高仿真人形机器人,配备30自由度,专为高级研究与复杂工业应用(如装箱、搬运等)设计。 | 产品介绍 |
| KUAVO LB | 高灵活性轮式人形机器人,配备夹爪或多指灵巧手,理想用于教学演示与家庭服务等场景。 | 产品介绍 |
2. 全流程协作框架
采集管理一体化框架:整合数据采集、存储、筛选、存储、管理的代码框架。
kuavo_data_challenge 训练部署一体化框架:基于lerobot,整合模型训练、部署全流程代码,提供开箱即用的开发环境。用户无需编写底层训练/部署逻辑,仅需配置任务参数与数据路径,即可快速启动模型迭代,显著降低开发门槛与工程化成本。
3. 数据采集平台
- 数据采集工具:集成VR采集工具,支持自动采集、自动上传,提升数据采集效率。
- 数据转换工具:支持数据格式转换(RosBag转Lerobot),提升数据质量与可复用性。
- 云数据存储管理平台:支持数据上传、导出、筛选、管理,提升数据管理效率。
4. 模型训练与部署套件
- NVIDIA Jetson AGX Orin 开发套件:边缘侧算力高达 275 TOPS,支持实时数据处理与模型部署,确保系统高效运行。
- 多卡集群算力训练平台:集群架构,支持多卡集群训练,加速模型训练。