百度EdgeBoard接入机器人案例
(一)案例介绍
声明
- ⚠️⚠️⚠️ 注意: 该案例为选配案例, 需要用户自行购买百度扩展板(DK-1A)
百度扩展板介绍
开发板型号: EdgeBoard DK-1A
开发板简介: EdgeBoard DK-1A是EdgeBoard系列的新一代开发板卡,除具有EdgeBoard系列特有的高性能AI推理性能,还提供包括40PIN等丰富的外设接口,方便用户进行产品的快速搭建及开发。
案例功能
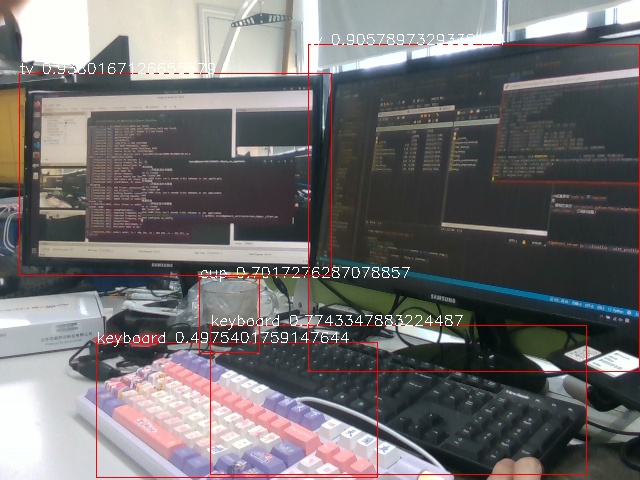
- 百度EdgeBoard(DK-1A)部署yolov3模型用于目标检测任务
- 百度EdgeBoard启动ros服务器,监听请求
- 机器上位机向百度EdgeBoard发送检测请求,并对返回结果进行语音播报
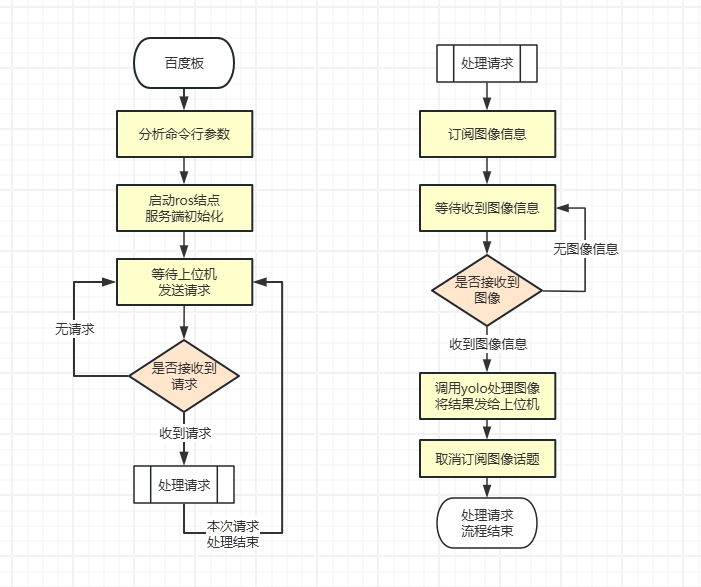
案例流程逻辑
- 参考本文档(二)百度EdgeBoard环境配置部分 配置百度EdgeBoard开发板环境
- 参考本文档(三)百度EdgeBoard模型部署部分 部署yolo目标检测模型
- 参考本文档(四)ROS通信系统配置部分 配置机器人上下位机及百度EdgeBoard开发板间的通信
- 参考本文档(五)启动流程示例部分 启动本案例程序
案例核心程序说明
edgeboard_service/scripts/upper_client.py
- 初始化机器人上位机客户端,通过语音触发, 发送请求
- 收到处理结果,分析结果,调用科大讯飞模型进行语音播报
edgeboard_service/yolov3-python/tools/edgeboard_server.py
- 初始化百度EdgeBoard服务端,监听请求
- 收到请求后,订阅图像话题,进行处理,将处理结果通过服务通信返回
- 上位机可以在
rqt_image_view中订阅/image_view/image_raw话题,查看图像处理结果 - 取消订阅图像话题,恢复监听状态,等待下一次请求
- 特点:仅在收到请求后进行一次图像处理,可以减少百度板的功耗,节省网络占用等
视频效果展示
(二)百度EdgeBoard环境配置
1.系统环境配置
方式一: 系统热更新
参考文档:
https://ai.baidu.com/ai-doc/HWCE/3lpxo3ayu#%E7%B3%BB%E7%BB%9F%E7%83%AD%E6%9B%B4%E6%96%B0
方式二: 重刷系统镜像
参考文档:
https://ai.baidu.com/ai-doc/HWCE/3lpxo3ayu#%E7%B3%BB%E7%BB%9F%E9%95%9C%E5%83%8F%E7%83%A7%E5%86%99
2.ROS开发环境配置
建议使用如下命令, 更换下载源并安装ros1的noetic版本
wget http://fishros.com/install -O fishros && . fishros
3.ROS功能包获取
方式一: 克隆上位机代码仓库
终端执行如下命令:
git clone https://gitee.com/leju-robot/kuavo_ros_application.git
方式二: 只复制所需的功能包
上位机代码仓库中, 本案例ROS功能包位置:
~/~/kuavo_ros_application/src/edgeboard_service
将edgeboard_service功能包复制到自己的ROS工作空间的src目录下即可
(三)百度EdgeBoard模型部署
部署yolo模型
1:安装opencv及推理工具PPNC
- 打开终端,执行以下命令安装opencv依赖库及EdgeBoard DK-1A推理工具PPNC。
sudo apt update
sudo apt install libopencv-dev -y
sudo apt install python3-opencv -y
sudo apt install ppnc-runtime -y
2:安装PaddlePaddle
- 打开终端,执行以下命令安装PaddlePaddle。
mkdir Downloads
cd Downloads
wget https://bj.bcebos.com/pp-packages/whl/paddlepaddle-2.4.2-cp38-cp38-linux_aarch64.whl
sudo pip install paddlepaddle-2.4.2-cp38-cp38-linux_aarch64.whl -i https://pypi.tuna.tsinghua.edu.cn/simple
3:安装依赖库。
- 在终端输入以下命令,进入yolov3-python目录,并安装依赖库:
cd src/edgeboard_service/yolov3-python
sudo pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
说明: 参数
-i https://pypi.tuna.tsinghua.edu.cn/simple表示此次使用清华源进行安装。由于网络原因,直接使用默认源安装可能会出现报错。同时yolov3的部署额外需要安装onnxruntime软件,终端输入:
sudo apt update
sudo apt install onnxruntime
4:配置config.json文件
- 若无更改,可略过此步骤
- 将模型生产阶段产生的model.nb、model.json、model.po、model.onnx模型文件传输至板卡,置于
yolov3-python/model文件夹 - model目录下修改config.json配置
{
"mode": "professional",
"model_dir": "./model",
"model_file": "model"
}
- 参数说明:
- mode: 固定为"professional"
- model_dir:传输至板卡的模型文件(model.json、model.nb、model.onnx、model.po)的目录
- model_file: 传输至板卡的四个模型文件的文件名,固定为model
5:运行推理代码。
- 确保当前位于yolov3-python目录下:
sudo python3 tools/infer_demo.py \
--config ./model/config.json \
--infer_yml ./model/infer_cfg.yml \
--test_image ./test_images/000000025560.jpg \
--visualize \
--with_profile
- 命令行选项参数如下:
- config: 上文建立的config.json的路径
- infer_yml: 模型导出时生成的infer_cfg.yml文件
- test_image: 测试图片路径
- visualize: 是否可视化,若设置则会在该路径下生成vis.jpg渲染结果,默认不生成
- with_profile: 是否推理耗时,若设置会输出包含前处理、模型推理和后处理的总耗时,默认不输出
6:查看推理结果。
- 在
src/edgeboard_service/yolov3-python目录下可以看到新增一个名为vis.jpg的推理结果文件。
部署其他模型
- 若需要部署其他模型, 可以自行参考官方文档:\ https://ai.baidu.com/ai-doc/HWCE/Olq3rvysr#%E6%A8%A1%E5%9E%8B%E6%8E%A8%E7%90%86
(四)ROS通信系统配置
概述
- 在夸父机器人的ROS通信系统中, 都是以下位机为ROS主机, 上位机为ROS从机
- 需先将机器人上位机, 机器人下位机, 百度EdgeBoard连接到同一局域网下, 确保三者能互相ping通
- 为了不破坏机器人本身的通信结构, 请严格按如下步骤进行操作, 不要修改其余内容
百度EdgeBoard
- 设置ROS_IP:
export ROS_IP=<百度EdgeBoard局域网IP>
- 设置ROS_MASTER_URI:
export ROS_IP=http://<机器人下位机局域网IP>:11311
机器人上位机
- 设置ROS_IP:
export ROS_IP=<机器人上位机局域网IP>
机器人下位机
- 不需要进行任何修改
(五)启动流程示例
⚠️ 注意: 该案例使用了科大讯飞的TTS模型。这个模型为收费模型,需要自行创建账号充值获取APPID, APISecret, API Key并将获取到的对应内容复制到程序对应位置,使用时机器人上位机要连接外网(能访问互联网)
- 该案例所使用的语音合成模型为讯飞语音合成(TTS)模型
- 访问:
https://console.xfyun.cn/services/tts,获取APPID,APISecret,APIKey - 将程序
~/kuavo_ros_application/src/edgeboard_service/scripts/tts_ws_python3_demo.py/tts_ws_python3_demo.py第139,140行的APPID,APISecret,APIKey替换成获取到的即可
- 访问:
launch启动文件参数说明
mode:选择启动哪一个文件mode:=server:百度板启动服务,程序仅在收到上位机请求后会订阅话题,处理完图像并返回信息后,将会关闭话题订阅,以此降低能耗mode:=client:上位机初始化客户端,发送一次请求,并收到返回信息后进行语音播报
仅设置
mode:=server时可选:visualize: 可视化选项,若设置为true,百度板会通过ros话题发布图像检测结果,且在指定路径下生成vis.jpg渲染结果with_profile: 是否终端显示模型推理耗时等信息,默认不显示
运行示例
机器人下位机:
- 若机器人未站立且未配置过H12遥控器服务:
- 在下位机新建一个终端
- 运行
roscore
百度Edge Board:
- 进入对应路径
cd kuavo_ros_application
- 启动服务端:
roslaunch edgeboard_service edgeboard_service.launch mode:=server visualize:=true with_profile:=true
- 注意:服务会保持持续开启状态,可多次处理请求
机器人上位机:
启动上位机程序
cd kuavo_ros_applicationsros1source /opt/ros/noetic/setup.bashsource devel/setup.bashroslaunch dynamic_biped load_robot_head.launch all_enable:=false
启动服务请求
cd kuavo_ros_applicationsource devel/setup.bashroslaunch edgeboard_service edgeboard_service.launch mode:=client- 语音输入
夸父夸父,机器人回应你好,我在. - 语音输入
你看到了什么?,机器人发送请求并语音播报结果
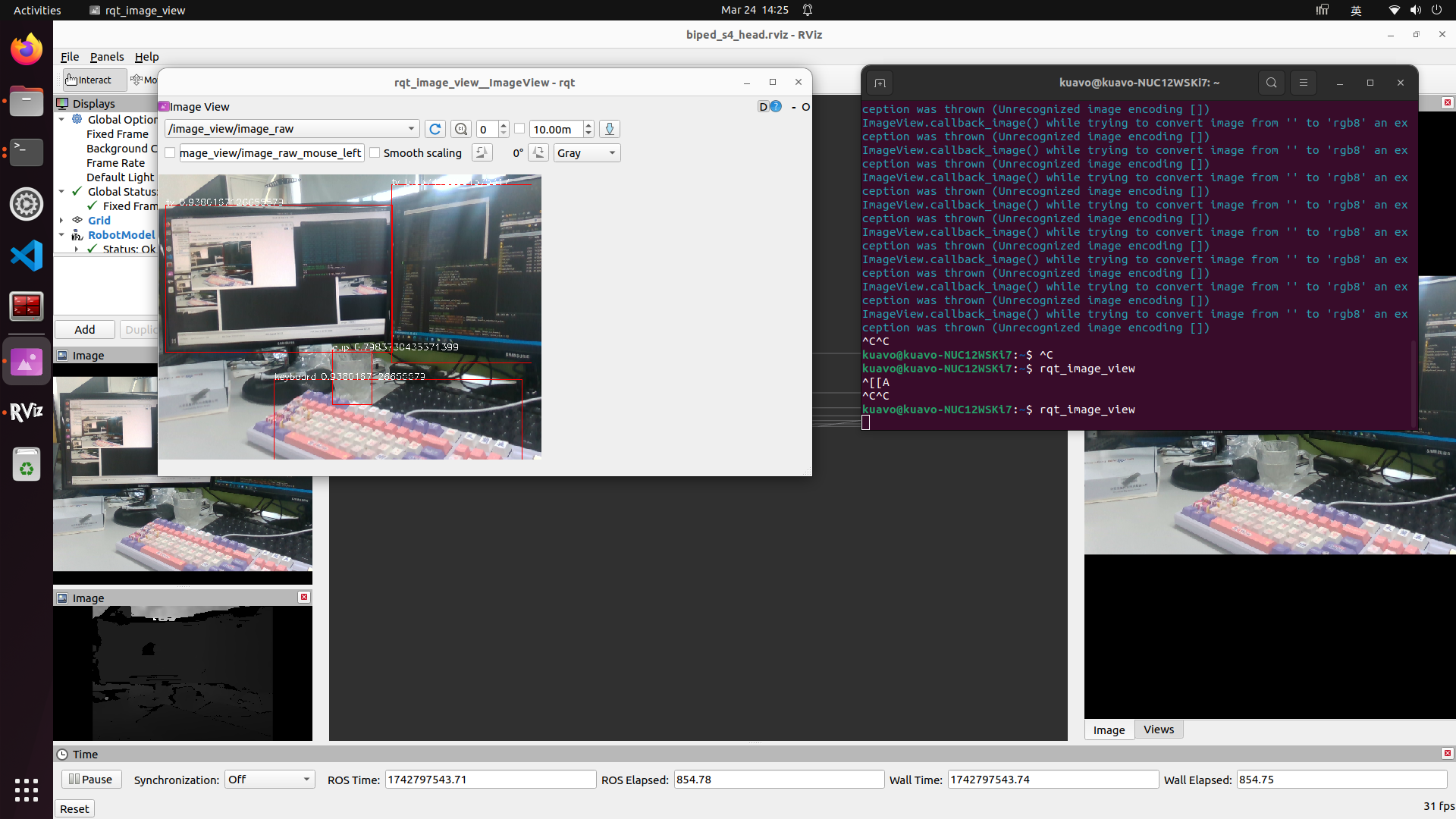
若想可视化图像处理结果:
- 百度板:
- 启动程序时参数设置
visualize:=true
- 启动程序时参数设置
- 机器人上位机:
- 在新终端执行
rqt_image_view - 订阅
/image_view/image_raw话题以查看图像处理结果
- 在新终端执行
- 百度板:
(六)运行效果
上位机客户端终端\
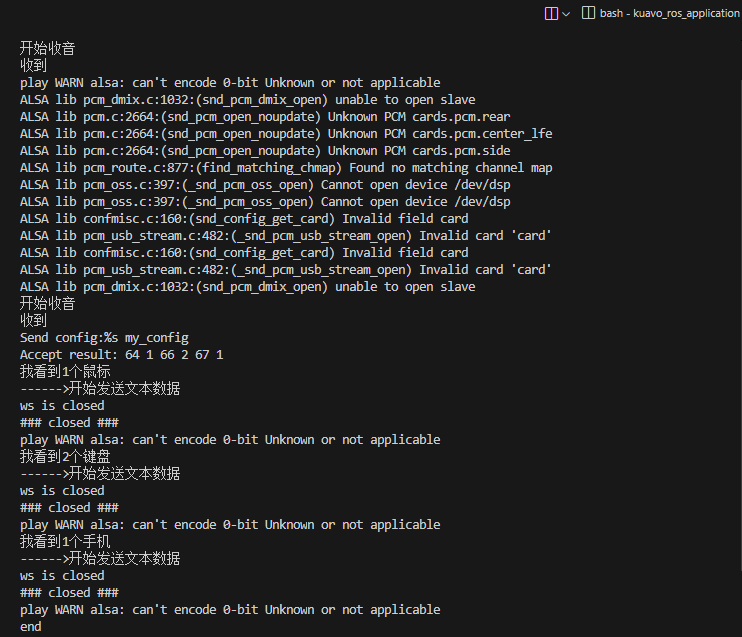
上位机语音输出内容
- 我看到一个鼠标
- 我看到两个键盘
- 我看到一个手机
百度板服务端终端\

图片处理结果示例\
上位机终端可视化示例\
百度板服务端代码流程图\