H12遥控器使用开发案例
1. 部署流程
执行部署脚本
⚠️ 注意: h12pro 遥控器的程序以及机器人程序,vr 程序都会使用部署时的 ROS_MASTER_URI 与 ROS_IP,请确保部署时的 ROS_MASTER_URI 与 ROS_IP 正确。确认ROS主从通信正确后再进行部署
1.1 下位机部署
cd /home/lab/kuavo-ros-opensource
cd /home/lab/kuavo-ros-opensource/src/humanoid-control/h12pro_controller_node/scripts
sudo su
./deploy_autostart.sh执行后,会自动安装依赖,并启动 h12pro 遥控器程序。
1.2 上位机部署
cd ~/kuavo_ros_application
cd ~/kuavo_ros_application/src/ros_audio/kuavo_audio_player/scripts
./deploy_autostart_h12pro.sh执行后会自动编译功能包,将h12遥控播放语音动作的服务设置为开机自启动并启动。根据终端中的提示选择y或n。
- H12PRO 遥控器服务管理
ocs2_h12pro_monitor服务位于下位机集成了遥控器节点和监控功能,会根据系统状态自动管理遥控器程序的启停。当用户手动启动机器人程序时,h12pro 遥控器程序会自动下线。开启服务:
sudo systemctl start ocs2_h12pro_monitor.service关闭服务:
sudo systemctl stop ocs2_h12pro_monitor.service开机自启动:
sudo systemctl enable ocs2_h12pro_monitor.service关闭开机自启动:
sudo systemctl disable ocs2_h12pro_monitor.service查看服务日志:
sudo journalctl -u ocs2_h12pro_monitor.service -fstart_h12pro_play_node服务位于上位机,将h12遥控器播放语音的相关服务设置成开机自启动。
- 查看机器人程序运行 LOG
sudo su
tmux attach -t humanoid_robot
- 检查遥控器数据是否正常
cd /home/lab/kuavo-ros-opensource
source devel/setup.bash
rostopic echo /h12pro_channel
- 注意事项
- 由于
ocs2_h12pro_monitor服务 priority 比较低, 如果用户手动启动roslaunch humanoid_controllers load_kuavo_real.launch程序时,ocs2_h12pro_node程序将会自动下线,直到用户结束机器人程序后,ocs2_h12pro_node程序才会自动重新上线。 - 存在可能用户结束机器人程序后,
ocs2_h12pro_node仍然没有上线或者没响应,请先pkill ros或者sudo pkill ros结束所有 ros 进程后,再重新启动sudo systemctl restart ocs2_h12pro_monitor.service服务。 - 如果使用的是遥控器外接模块(一个接着遥控器接收器的 USB 的设备)去接收器遥控器的数据,请在机器人上电后大概20-30秒后,再将外接模块插到机器人上。
- 如果重启机器人 NUC 后,遥控器数据无法正常接收,请热插拔外接模块后再试。
2. 状态机概述
- 基本状态
initial: 初始状态(机器人 NUC 开机, 程序未启动状态)calibrate: 校准状态(启动机器人程序带上校正参数的状态)ready_stance: 准备姿态(启动机器人程序后,尚未站立的状态)stance: 站立姿态walk: walk 状态vr_remote_control: VR 遥控器控制状态
状态转换流程图
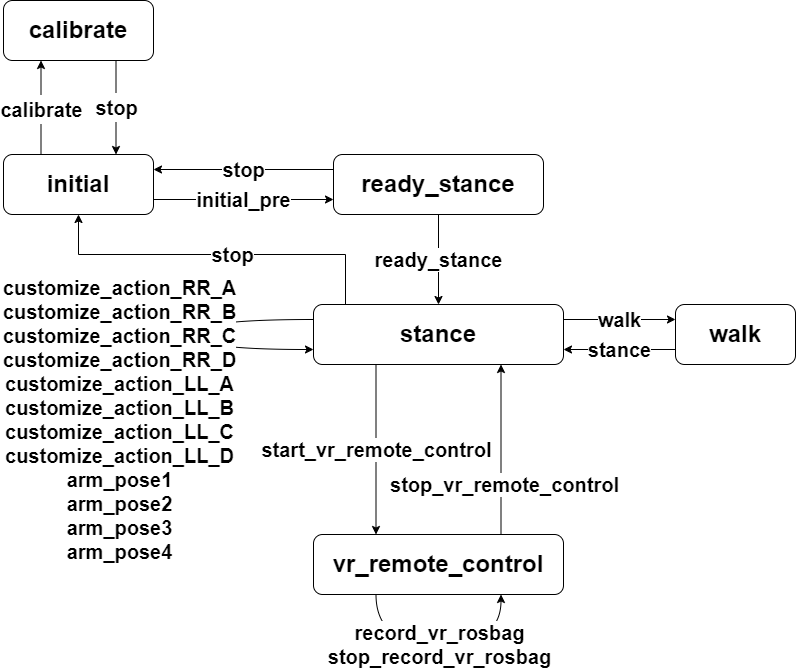
Source表示当前机器人状态,上图中线段的起点Trigger表示触发状态转换,上图中线段上的文字Dest表示机器人目标状态,上图中线段箭头的终点
状态转换如下:
从 initial 状态:
initial_pre-> ready_stancecalibrate-> calibrate
从 ready_stance 状态:
ready_stance-> stancestop-> initial
从 stance 状态:
walk-> walkarm_pose1/2/3/4-> stance (手臂姿态控制)customize_action_RR/LL_A/B/C/D-> stance (播放语音和动作)stop-> initialstart_vr_remote_control-> vr_remote_control
从 walk 状态:
stance-> stancestop-> initial
从 vr_remote_control 状态:
stop_vr_remote_control-> stancestop-> initialrecord_vr_rosbag-> vr_remote_controlstop_record_vr_rosbag-> vr_remote_control
3. 遥控器配置
按键示意图
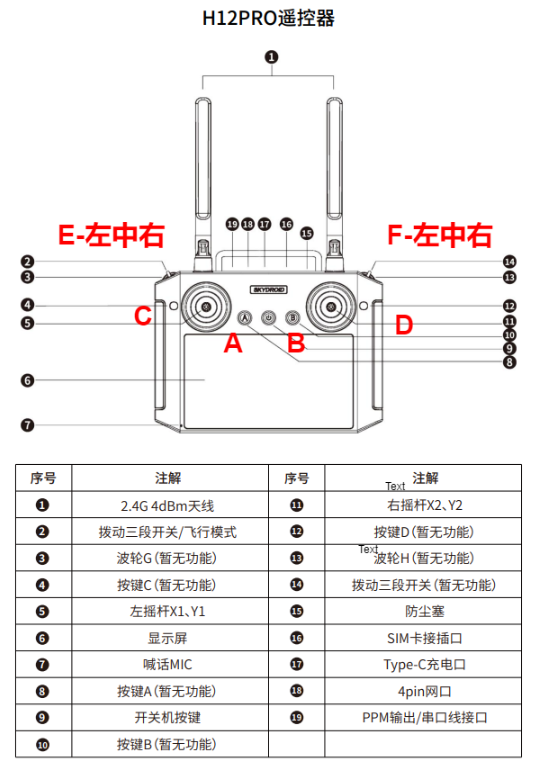
状态转换按键组合
- Initial (机器人 NUC 开机, 程序未启动状态) 状态转换
| 目标状态 | 按键组合 | 开关位置 |
|---|---|---|
| ready_stance | C_PRESS | E_LEFT + F_RIGHT |
| calibrate | D_PRESS | E_LEFT + F_RIGHT |
- Ready_stance (启动机器人程序后,尚未站立的状态) 状态转换
| 目标状态 | 按键组合 | 开关位置 |
|---|---|---|
| stance | C_PRESS | E_LEFT + F_RIGHT |
| initial | C_LONG_PRESS + D_LONG_PRESS | 任意 |
- Calibrate (启动机器人程序带上校正参数的状态)状态转换
| 目标状态 | 按键组合 | 开关位置 |
|---|---|---|
| initial | C_LONG_PRESS + D_LONG_PRESS | 任意 |
- Stance 状态转换
| 目标状态 | 按键组合 | 开关位置 |
|---|---|---|
| walk | A_PRESS | E_MIDDLE + F_MIDDLE |
| arm_pose1 | A_PRESS | E_RIGHT + F_LEFT |
| arm_pose2 | B_PRESS | E_RIGHT + F_LEFT |
| arm_pose3 | C_PRESS | E_RIGHT + F_LEFT |
| arm_pose4 | D_PRESS | E_RIGHT + F_LEFT |
| customize_action_RR_A | A_PRESS | E_RIGHT + F_RIGHT |
| customize_action_RR_B | B_PRESS | E_RIGHT + F_RIGHT |
| customize_action_RR_C | C_PRESS | E_RIGHT + F_RIGHT |
| customize_action_RR_D | D_PRESS | E_RIGHT + F_RIGHT |
| customize_action_LL_A | A_PRESS | E_LEFT + F_LEFT |
| customize_action_LL_B | B_PRESS | E_LEFT + F_LEFT |
| customize_action_LL_C | C_PRESS | E_LEFT + F_LEFT |
| customize_action_LL_D | D_PRESS | E_LEFT + F_LEFT |
| start_vr_remote_control | A_LONG_PRESS | 任意 |
| initial | C_LONG_PRESS + D_LONG_PRESS | 任意 |
| toggle_head_control | B_PRESS | E_MIDDLE + F_RIGHT |
- Walk 状态转换
| 目标状态 | 按键组合 | 开关位置 |
|---|---|---|
| stance | D_PRESS | E_MIDDLE + F_MIDDLE |
| initial | C_LONG_PRESS + D_LONG_PRESS | 任意 |
- VR_remote_control 状态转换
| 目标状态 | 按键组合 | 开关位置 |
|---|---|---|
| stance | B_LONG_PRESS | 任意 |
| initial | C_LONG_PRESS + D_LONG_PRESS | 任意 |
| record_vr_rosbag | C_PRESS | 任意 |
| stop_record_vr_rosbag | D_PRESS | 任意 |
NOTE
- 遥控器按键组合中,长按(LONG_PRESS)表示按键按下后持续保持按下状态,直到听到遥控器发出 “滴” 的一声
- 在Stance状态下
arm_pose这4组目标状态仅支持自定义播放动作,其动作文件存放在/home/lab/.config/lejuconfig/action_files路径下,文件名格式为arm_pose1.tact,arm_pose2.tact,arm_pose3.tact,arm_pose4.tact - 手臂动作做完后,假设手臂没有回到初始位置,可以通过 E中+F中+D键,将手臂回到初始位置
- 在Stance状态下
customize_action这8组目标状态支持自定义播放语音和动作,需修改下位机路径为/home/lab/kuavo-ros-opensource/src/humanoid-control/h12pro_controller_node/config/customize_config.json的配置文件中对应目标状态的arm_pose_name动作文件的文件名(不加后缀)以及music_name音频文件名(加后缀) - 上位机为
WNUC12WSKI70000将对应的音频文件放到上位机路径为/home/kuavo/.config/lejuconfig/music文件夹中 - 上位机为
AGX-Orin/ORIN-NX将对应的音频文件放到下位机路径为/home/lab/.config/lejuconfig/music文件夹中 - tact动作文件放到下位机路径为
/home/lab/.config/lejuconfig/action_files文件夹中 - 若是需要使用遥控器执行python程序,可按下面的方式修改
/home/lab/kuavo-ros-opensource/src/humanoid-control/h12pro_controller_node/config/customize_config.json
"customize_action_LL_A": {
"type": "shell",
"command": "python3 /home/lab/.../~.py"
},
上述操作完成后需要关机重启机器人
进入 VR 遥控遥操作状态后,遥控器将不再响应遥控器按键组合(除了紧急停止按键组合和退出 VR 遥控遥操作按键组合),直到退出 VR 遥控遥操作状态
VR 录制的 rosbag 文件存放在
~/.log/vr_remote_control/rosbag路径下, 按照日期和时间命名VR 录制指定的话题配置文件存放在
/home/lab/kuavo-ros-opensource/src/humanoid-control/h12pro_controller_node/config/record_topics.json路径下指定录制的话题如下:
/kuavo_arm_traj#手臂关节值/control_robot_hand_position#手指/robot_head_motion_data#头部深度相机
/camera/depth/image_rect_raw# 深度相机图像/camera/depth/camera_info# 深度相机内参(由realsense出厂前设置标定好)/camera/depth/color/points# 带有深度的RGB点云(Point2D)
RGB相机
/camera/color/image_raw# RGB相机图像/camera/color/camera_info# RGB相机内参(由realsense出厂前设置标定好)
深度对齐RGB相机
/camera/aligned_depth_to_color/image_raw# 深度对齐RGB后的深度图像/camera/aligned_depth_to_color/camera_info# 深度对齐RGB后的相机内参
- 摇杆配置
摇杆支持在以下状态使用:
- stance
- walk
左摇杆
- 垂直方向: X轴移动
- 水平方向: Y轴移动
右摇杆
- 垂直方向: 躯干高度控制
- 水平方向: 旋转控制
紧急停止
- 组合键: C_LONG_PRESS + D_LONG_PRESS
- 适用状态: 所有状态(除了 initial 状态)
- 假如在站立状态下触发停止,机器人会先下蹲再停止