二维码抓取水瓶案例
案例介绍
简介
- 机器人通过头部摄像头识别二维码,解算二维码的坐标信息,并通过ik逆解计算手臂关节角度进行抓取
功能说明
- 通过识别AprilTag标签,得到抓取目标在坐标系中的位置
- 自主判断左右手,并计算手臂末端期望位置与姿态
- 通过ik逆解服务,得到手臂各关节的目标角度
- 实现抓水、递水流程,过程流畅
流程逻辑
- 机器人低头,短暂延时后获取指定ID的AprilTag的平均数据
- 设置手臂运动模式为外部控制
- 松开手部,移动到准备姿态
- 计算ik求解参数,进行ik求解,使用ik结果进行移动
- 握紧手部,递水,松开手部,手臂复位,机器人抬头,流程结束
实机视频展示
准备
二维码准备(上位机)
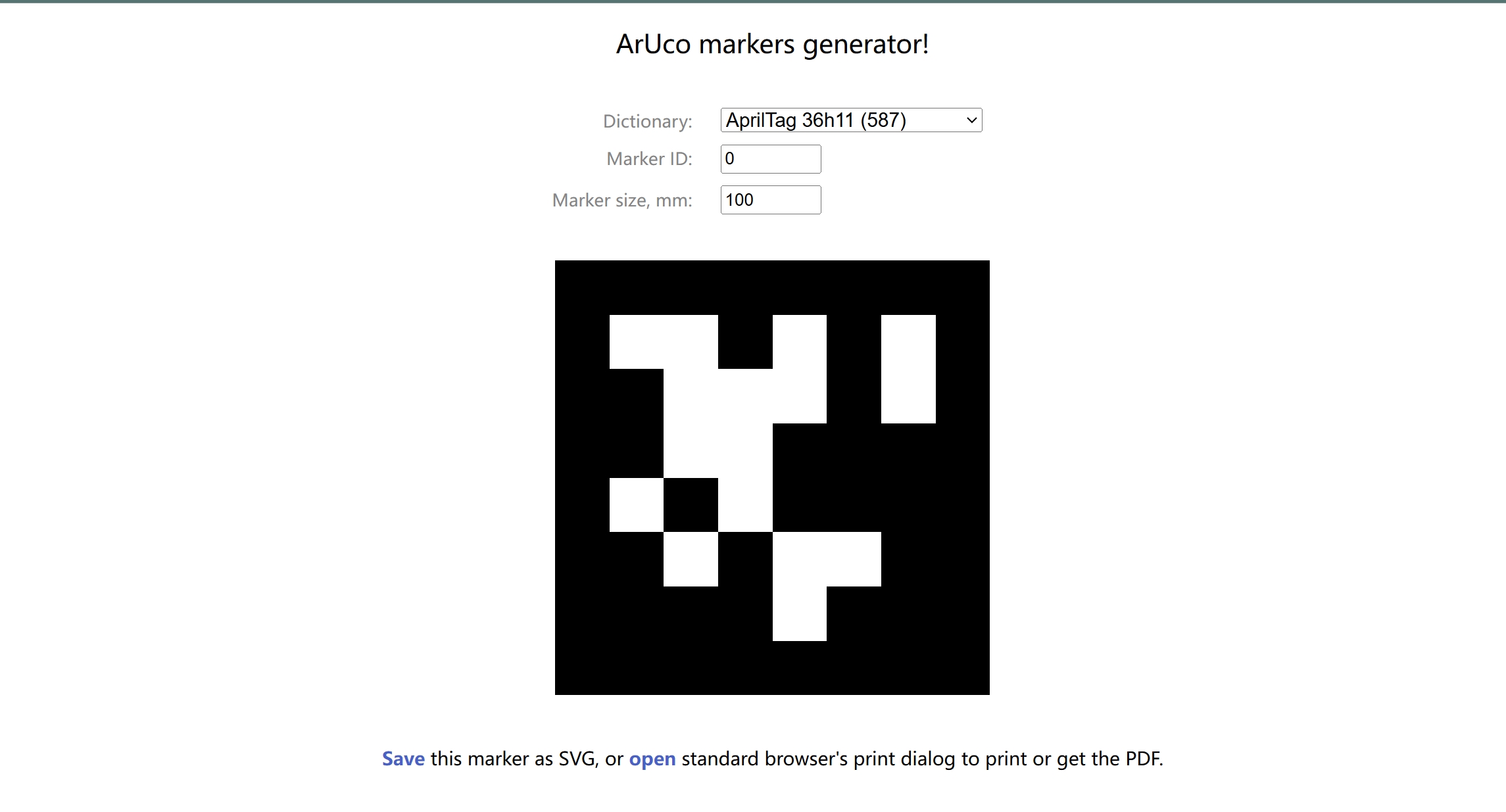
- 二维码下载
- 二维码下载网站
- 使用的二维码类型为apriltag,类型为36h11,id号与尺寸根据实际需要设置
- 调整配置文件(上位机)
- 配置文件位于
~/kuavo_ros_application/src/ros_vision/detection_apriltag/apriltag_ros/config/tags.yamlstandalone_tags:
[
{id: 0, size: 0.042, name: 'tag_0'},
{id: 1, size: 0.042, name: 'tag_1'},
...
]
- 注意:
- 这里的size要和打印的二维码大小一致(二维码大小可在前面提到的网站设置)
- 默认的抓取点在二维码正下方,因此二维码要贴在瓶盖上面
夹爪机器人配置检查(下位机)
- 若您的机器末端执行器为灵巧手,跳过此步骤即可
- 若您的机器末端执行器为夹爪, 需要检查下位机本地的
/home/lab/kuavo-ros-opensource/src/kuavo_assets/config/kuavo_v$ROBOT_VERSION/kuavo.json这个配置文件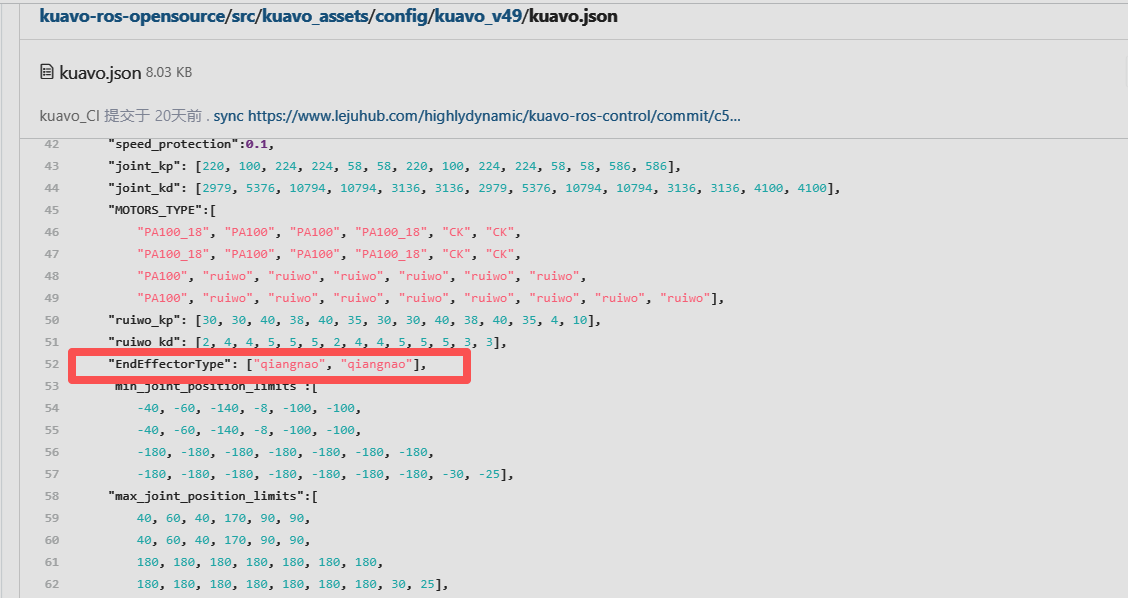
- 若图中红框内是
"qiangnao"需要改成"lejuclaw"
代码路径
- 路径:
/home/lab/kuavo-ros-opensource/src/demo/arm_capture_apriltag
代码编译
cd /home/lab/kuavo-ros-opensource #仓库目录
sudo su
catkin build kuavo_sdk
ros话题与服务
上位机
- 启动传感器,实时识别二维码并解算出其在机器人基坐标系的位置
- 发布
/robot_tag_info话题,传递信息
下位机
- 设置手臂运动模式
- 调用 ROS 服务
/arm_traj_change_mode,设置手臂运动模式为外部控制模式
- 启动ik逆解服务
- 计算ik逆解参数,调用 ROS 服务
/ik/two_arm_hand_pose_cmd_srv计算给定坐标与姿态的逆运动学解。 - 获取ik逆解结果: q_arm: 手臂关节值,(单位弧度)
- 控制机器人头部
- 发布到
/robot_head_motion_data话题 - 设置关节数据,包含偏航和俯仰角
- 控制机器人手部开合
- 发布到
/control_robot_hand_position话题 - 设置握紧或松开的关节角度
- 控制机器人夹爪开合
- 调用 ROS 服务
/control_robot_leju_claw - 设置夹爪开合的角度
- 获取二维码标签信息
- 从话题
/robot_tag_info接收到AprilTagDetectionArray消息 - 获取指定ID的AprilTag的平均位置(基于机器人基坐标系)
avg_off_horizontal对应x轴avg_off_camera对应y轴avg_off_vertical对应z轴
运行示例
启动参数
offset_start: 是否启动坐标偏移量- 参数输入
True:启用坐标偏移量,一般在实机中使用,以观察抓取效果 - 参数输入
False:不启用坐标偏移量,一般在仿真中使用,以观察求解效果
- 参数输入
坐标偏移量
- 主要参数:
offset_zz方向偏移量,默认默认的抓取点在二维码正下方,因此为负值temp_x_l temp_x_rx方向偏移量,左右都为负值temp_y_l temp_y_ry方向偏移量,均为正值,左加右减offset_anglez轴角度偏移量,在进行ik求解时,若觉得yaw角不符合预期,可适当增加或降低该值
- 调参说明:(以右手为例,机器人面朝方向为前方)
- 若抓取点偏上,则降低
offset_z的值,反之则调高 - 若抓取点偏右,则增大
temp_y_r的值,反之则降低 - 若抓取点偏前,则降低
temp_x_r的值,反之则调高
- 若抓取点偏上,则降低
- 参数位置:
arm_capture_apriltag.py文件,主函数中进行设置- 使用示例:
# offset_start="True"表示启用偏移量 否则不启用偏移量
if args.offset_start == "True":
# 偏向侧后边一点
offset_z=-0.10 # 抓取点位于标签正下方
temp_x_l=-0.035
temp_y_l=0.035
temp_x_r=-0.045
temp_y_r=0.035
else :
offset_z=0.00
temp_x_l=0.00
temp_y_l=0.00
temp_x_r=0.00
temp_y_r=0.00
# 角度偏移量(修正绕z轴的偏移角度)
offset_angle=1.00
欧拉角设定
- 使用示例:
quat=ToQuaternion(relative_angle*offset_angle, -1.57 , 0)eef_pose_msg.hand_poses.left_pose.quat_xyzw = [quat.x,quat.y,quat.z,quat.w]
- ToQuaternion参数:
- 偏航角yaw:通过当前手臂末端位置与目标手臂末端位置计算
- 俯仰角pitch:左右手均固定为负90度
- 横滚角度roll:左手为负、右手为正,以右手为例:经过测试设置负(0~20)效果会比较好
运行步骤
- SDK环境构建
- 执行
catkin build kuavo_sdk编译sdk功能包 - 执行
catkin build motion_capture_ik编译ik功能包
- 下位机 使机器人站立
- 仿真:
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch - 实物:
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true
- 下位机 启动ik求解服务
注意: 部分版本的ik逆解服务会在上一步启动机器人时自动启动,注意不要重复启动
判断方式: 终端输入
rosnode list | grep ik若已存在
/arms_ik_node, 则跳过此步若不存在
/arms_ik_node, 则运行:在lab目录下新开一个终端执行
cd /home/lab/kuavo-ros-opensource,执行
sudo su进入root用户,执行
source devel/setup.bash,执行
roslaunch motion_capture_ik ik_node.launch,cd kuavo-ros-opensource # 进入下位机工作空间
sudo su
source devel/setup.bash
roslaunch motion_capture_ik ik_node.launch
- 发送tag信息(
仿真运行和实机运行二选一,不要同时运行)
仿真运行 下位机启动tag信息mock工具- 新开一个终端执行
cd kuavo-ros-opensource, - 执行
sudo su进入root用户, - 执行
source devel/setup.bash, - 执行
python3 src/demo/arm_capture_apriltag/mock_tag_publisher.py
- 新开一个终端执行
实机运行 上位机启动传感器- 新开一个终端执行
cd kuavo_ros_application, - 执行
source /opt/ros/noetic/setup.bash切换到ros1环境 , - 如果是远程连接上位机桌面
- 若上位机为
i7,执行export DISPLAY=:1.0 - 若上位机为
ORIN-NX或AGX-Orin,执行export DISPLAY=:2.0
- 若上位机为
- 执行
source devel/setup.bash, - 根据实际机器人版本启动程序:
# 旧版4代, 4Pro
roslaunch dynamic_biped load_robot_head.launch
# 标准版, 进阶版, 展厅版, 展厅算力版
roslaunch dynamic_biped load_robot_head.launch use_orbbec:=true
# Max版
roslaunch dynamic_biped load_robot_head.launch use_orbbec:=true enable_wrist_camera:=true- 新开一个终端执行
- 检测下位机是否能收到标签信息
下位机执行rostopic list | grep tag- 如果存在
/robot_tag_info- 执行
rostopic echo /robot_tag_info - 观察是否存在标签的坐标信息
- 执行
- 注意事项:
- 如果在实物上运行,需测量得到的坐标信息是否准确
- 要启动下位机程序后,上位机才能检测到机器人各关节的角度,以计算出基于机器人坐标系的结果
- 下位机 启动二维码抓取流程
- 在lab目录下新开一个终端执行
cd /home/lab/kuavo-ros-opensource, - 执行
sudo su进入root用户, - 执行
source devel/setup.bash, - 机器人实物运行
- 执行
python3 src/demo/arm_capture_apriltag/arm_capture_apriltag.py --offset_start True
- 执行
- 机器人仿真运行
- 执行
python3 src/demo/arm_capture_apriltag/arm_capture_apriltag.py --offset_start False
- 执行
- 注1:若仿真环境卡顿,可适当增加延时,以确保机器人手臂每个动作都能执行到位,示例如下:
publish_arm_target_poses([1.5], [20.0, ...])修改为publish_arm_target_poses([3], [20.0, ...])time.sleep(2.5)修改为time.sleep(5)
- 注2:若使用夹爪
- 执行
python3 src/demo/arm_capture_apriltag/claw_capture_apriltag.py即可,参数含义与arm_capture_apriltag.py相同 - 本案例是使用灵巧手的机器开发的, 对夹爪的机器只是做了兼容适配, 用户若使用夹爪机器人复现此案例,需要额外自行对抓取前的"准备姿态"进行调整
- 执行
实机结果示例
- 准备姿态

- ik逆解移动

- 递水
