数据采集案例
说明
- 数据采集方式为通过rosbag包录制目标需求的机器人信息话题,如相机图像、手臂位置轨迹等等
示例代码
- 路径:
/home/lab/kuavo-ros-opensource/src/demo/examples_code/record_data/rosbag_tool.py - 描述:该程序是一个用于录制和回放rosbag文件
关键函数说明
1 record_rosbag(config)
- 功能:录制 ROS bag 文件。
- 参数:
config:包含录制主题列表的字典。
- 流程:
- 创建保存路径。
- 生成文件名。
- 构建录制命令。
- 启动录制并等待用户中断。
- 保存录制结果。
2 playback_rosbag()
- 功能:回放 ROS bag 文件。
- 流程:
- 列出日期文件夹。
- 列出 bag 文件。
- 启动回放。
3 main()
- 功能:程序入口,显示主菜单并调用相应功能。
程序逻辑
初始化阶段
检查依赖:
- 程序首先检查是否安装了
questionary和rich库。 - 如果未安装,则通过
pip自动安装。
- 程序首先检查是否安装了
加载配置文件:
- 从
record_topics.json文件中加载需要录制的 ROS 主题列表。 - 配置文件路径为
record_topics_path,与脚本文件在同一目录下。
- 从
设置保存路径:
- 定义 ROS bag 文件的保存路径为
~/.log/vr_remote_control/rosbag。
- 定义 ROS bag 文件的保存路径为
主菜单
显示主菜单:
- 使用
questionary.select显示主菜单,提供两个选项:- 录制 VR 手臂数据和相机数据 ROSBAG
- 回放 VR 手臂数据和相机数据 ROSBAG
- 使用
用户选择操作:
- 根据用户选择,调用相应的功能函数(
record_rosbag或playback_rosbag)。
- 根据用户选择,调用相应的功能函数(
录制 ROS Bag 文件
准备录制路径:
- 获取当前日期,并创建对应的文件夹,如果文件夹已存在,则直接使用。
生成文件名:
- 使用当前时间戳生成唯一的 bag 文件名。
构建录制命令:
- 如果配置文件中指定了主题列表,则录制这些主题。
- 如果未指定主题,则录制所有主题(使用
-a参数)。
启动录制:
- 使用
subprocess.Popen启动rosbag record命令。 - 录制过程中,用户可以通过
Ctrl+C停止录制。
- 使用
保存录制结果:
- 录制完成后,程序会输出保存路径。
回放 ROS Bag 文件
选择日期文件夹:
- 列出
~/.log/vr_remote_control/rosbag目录下的所有日期文件夹。 - 用户选择一个日期文件夹。
- 列出
选择 bag 文件:
- 列出所选日期文件夹中的所有
.bag文件。 - 用户选择一个 bag 文件。
- 列出所选日期文件夹中的所有
启动回放:
- 使用
subprocess.Popen启动rosbag play命令。 - 回放过程中,程序会输出回放文件的路径。
- 使用
JSON配置文件说明
# 当前录制的话题如下
# "record_topics": [
# "/kuavo_arm_traj",
# "/control_robot_hand_position",
# "/robot_head_motion_data",
# "/camera/depth/image_rect_raw",
# "/camera/depth/camera_info",
# "/camera/depth/color/points",
# "/camera/color/image_raw",
# "/camera/color/camera_info",
# "/camera/aligned_depth_to_color/image_raw",
# "/camera/aligned_depth_to_color/camera_info"
# ],
配置录制话题有哪些的 json 文件在 /home/lab/kuavo-ros-opensource/src/demo/examples_code/record_data/record_topics.json 中
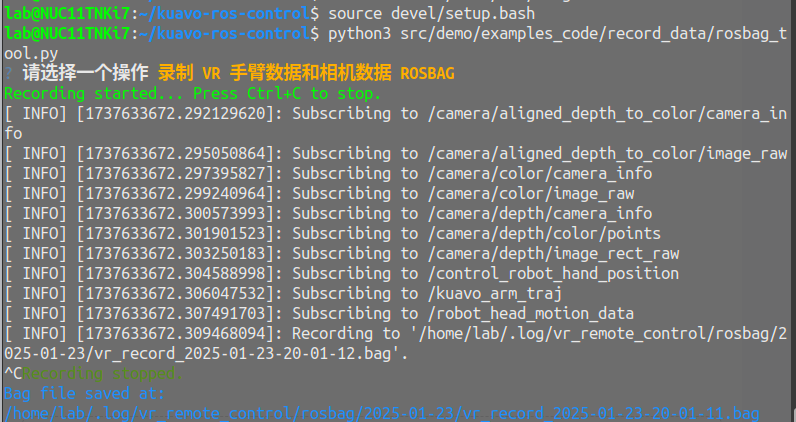
执行及效果
启动
先启动想录制的话题相关程序
cd kuavo-ros-opensource
source devel/setup.bash
python3 src/demo/examples_code/record_data/rosbag_tool.py采集效果