灵巧手手势使用案例
预设手势
/gesture/list:列出所有手势点击展开查看所有手势列表, 注意:如与服务接口返回不一致, 请以实际情况为准!
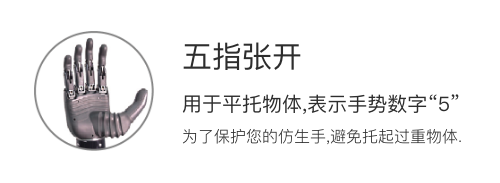
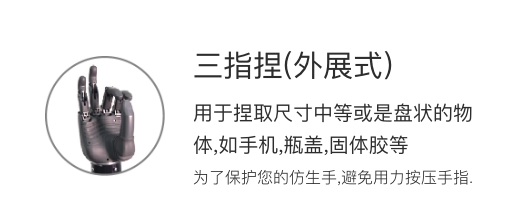
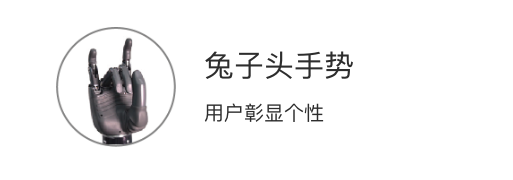
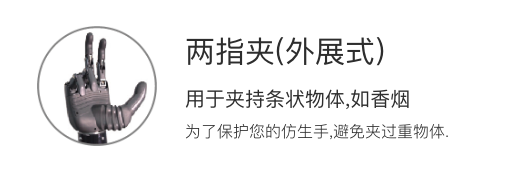
名称 名称 别名 描述 单指点(内收式) "finger-pointing-opposed" "number_1" 用于触动按钮开关、点击键盘、鼠标、指示方向。该手势也可用于表示数字“1” 单指点(外展式) "finger_pointing-unopposed" "number_8" 用于触动按钮开关,表示数字“8”。 两指夹(内收式) "two-finger-spread-opposed" "number_2", "victory" 用于夹持条状物体,如香烟,也可表示“胜利”、数字“2”。 两指夹(外展式) "two-finger-spread-unopposed" "hold-cigarette" 用于夹持条状物体,如香烟。 两指捏(外展式) "precision-pinch-unopposed" "ok","number_3" 用于捏取尺寸、重量较小的物体,表示“OK”。 两指捏(内收式) "precision-pinch-opposed" 用于捏取尺寸、重量较小的物体,如硬币、卡片、钥匙、固体胶、花生、葡萄。 鼠标手势 "mouse-control" 用于控制鼠标,选定该手势以后,仿生手形成对鼠标的包络。 兔指 "rock-and-roll" 用于彰显个性。 三指捏(外展式) "tripod-pinch-unpposed" 用于捏取尺寸中等或是盘状的物体,如手机,瓶盖,固体胶等。 三指捏(内收式) "tripod-pinch-opposed" "number_7" 捏取物体,表示手势数字七。 食指弹 "flick-index-finger" 用于利用电机和扭簧配合弹出食指。 中指弹 "flick-middle-finger" 用于利用电机和扭簧配合弹出中指。 托夹式(大拇指内收) "inward-thumb" "number_4" 多用于托碗、盘子等。表示手势数字四。 四指拿 "four-finger-straight" 用于端取碗或大直径的圆柱物体,物体不接触手心。 五指张开 "palm-open" "number_5" 用于平托物体,表示手势数字五。 握拳 "fist" 握持各类不同大小、形状的物体,如水杯、网球、球拍、苹果。 虎克提 "thumbs-up" "thumbs-up" 用于提取物体,如手提袋、包等。同时表达:真棒!点个赞! 侧边捏 "side-pinch" 用于拿接名片、捏物品等。 夹笔1 "pen-grip1" 用于夹普通笔、毛笔等写字。 夹笔2 "pen-grip2" 用于夹普通笔、毛笔等写字。 五指抓 "cylindrical-grip" "five-finger-grab" 用于抓取物体,手心不完全接触物体。 666 "shaka-sign" "number_6", "666" 表示数字六,同时也是网路用语666。 五指捏 "five-finger-pinch" 用于抓握物体。 两指侧捏 "two-finger-side-pinch" "pen-grip3" 利用食指侧边配合大拇指完成物品捏取。
手势图例
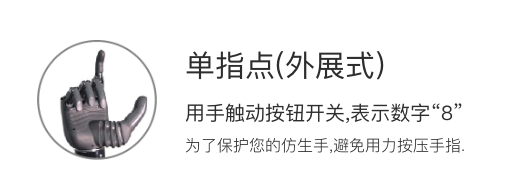
单指点(外展式)
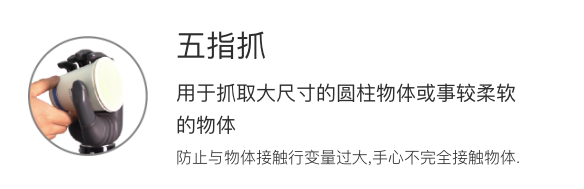
五指抓取
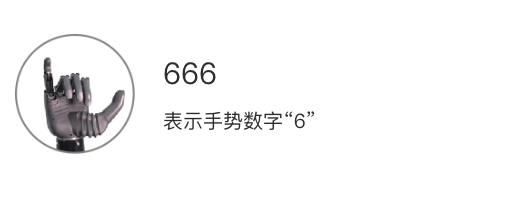
666手势
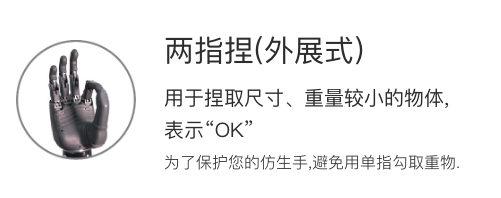
两只捏(外展式)
握拳
fist点赞
thumbs-up五指张开
三指捏
兔子头手势
二指夹(外展式)
执行预设手势
/gesture/execute服务- 该服务用于执行预设手势
- 请求值:
gesture_name预设的手势名称和hand_side选择要使用的手。 - 响应值:是否成功(bool类型)。
- 该服务用于抢占式执行预设的手势(假如有手势正在执行则会中断该执行),通过 gesture_names 来选择手势,手势名称可以通过
/gesture/list查看 - 警告:不要在使用
/control_robot_hand_position控制灵巧手的同时调用该接口, 否则会出现无法预料的效果.
查询是否有预设手势执行
/gesture/execute_state服务- 该服务用于查询是否有手势正在执行
- 请求值: 无。
- 响应值: 是否有预设手势执行(bool类型)。
示例代码
- 路径:
/home/lab/kuavo-ros-opensource/src/demo/examples_code/hand_gesture/gesture_client.py