键盘控制案例
描述
使用键盘控制机器人的运动
使用键盘控制机器人手臂移动
示例代码
示例代码1:键盘控制机器人的运动及手臂移动(自由切换):
/home/lab/kuavo-ros-opensource/src/kuavo_sdk/scripts/keyboard_control/robot_keyboard_control.py
示例代码2:仅使用键盘控制机器人的运动:
/home/lab/kuavo-ros-opensource/src/kuavo_sdk/scripts/keyboard_control/move_keyboard_control.py
示例代码3:仅使用键盘控制机器人手臂移动:
/home/lab/kuavo-ros-opensource/src/kuavo_sdk/scripts/keyboard_control/arm_keyboard_control.py
以下均为
示例代码1的描述,若使用示例代码2/3,仅参考对应的部分即可
程序逻辑
程序初始化
程序启动时,初始化ROS节点,节点名称为simulated_joystick
创建一个SimulatedJoystick类的实例
订阅/stop_robot话题,用于接收停止机器人的信号
使用termios库设置键盘输入为非阻塞模式,以便实时读取键盘输入
手臂移动控制
读取传感器数据得到当前各关节角度,再通过fk正解,得到初始末端位姿
初始化程序参数,储存机器人的末端位姿期望信息
调用termios库设置键盘输入模式,实时读取键盘输入
手臂切换至控制模式二(外部控制)
发布/kuavo_arm_target_poses话题,用于控制手臂目标姿态
整机运动控制
- 发布/joy话题,用于发送模拟的遥控器信号
键盘输入处理
getKey函数:
使用select库监听键盘输入,设置超时时间为0.1秒
如果有键盘输入,读取单个字符并返回;否则返回空字符串
如果键盘输入ctrl+c 则恢复键盘的原始设置 并退出程序
update_joy函数:
手臂移动控制
根据键盘输入更新末端执行器
位置控制(XYZ)与姿态控制(RPY)的参数值整机运动控制
根据键盘输入更新模拟遥控器的状态(按钮和摇杆信号)
控制指令发布
主循环:
在run函数中,程序进入主循环,不断监听键盘输入。
手臂移动控制
自适应处理:
根据设定的末端位置,计算得出一个相对合理的末端姿态
自适应处理能确保在
自动控制末端姿态模式下,最大的可达空间。手动修改:
若处在
手动控制末端姿态模式下,则启用输入的角度参数。以
自适应处理得到的末端姿态为参照,进行二次旋转。将最后的结果作为最终参数发给ik进行求解
整机运动控制
如果有键盘输入,调用update_joy函数更新遥控器状态。
将更新后的遥控器信号(joy_msg)发布到/joy话题。
退出条件:
如果按下Ctrl-C,程序退出主循环。
如果接收到/stop_robot话题的消息,程序调用rospy.signal_shutdown关闭ROS节点。
程序退出
资源清理:
程序退出时,恢复键盘的原始设置,避免键盘输入异常。
参数说明
joystick_sensitivity:灵敏度,无单位.修改路径:
/home/lab/kuavo-ros-opensource/src/humanoid-control/humanoid_controllers/launch/joy/joy_control_sim.launch
编译
cd /home/lab/kuavo-ros-opensource
sudo su
catkin build kuavo_sdk motion_capture_ik kuavo_msgs humanoid_controllers
执行
启动机器人
cd kuavo-ros-opensource # 进入下位机工作空间
sudo su
source devel/setup.bash
# 仿真环境运行
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch
# 实物运行
roslaunch humanoid_controllers load_kuavo_real.launch启动ik逆解服务器
- 注意: 部分版本的ik逆解服务会在上一步启动机器人时自动启动,注意不要重复启动
- 判断方式: 终端输入
rosnode list | grep ik - 若已存在
/arms_ik_node, 则跳过此步 - 若不存在
/arms_ik_node, 则运行:cd kuavo-ros-opensource # 进入下位机工作空间
sudo su
source devel/setup.bash
roslaunch motion_capture_ik ik_node.launch
启动键盘控制案例
cd kuavo-ros-opensource # 进入下位机工作空间
sudo su
source devel/setup.bash
python3 src/kuavo_sdk/scripts/keyboard_control/robot_keyboard_control.py操作说明
初始为
键盘控制手臂模式按
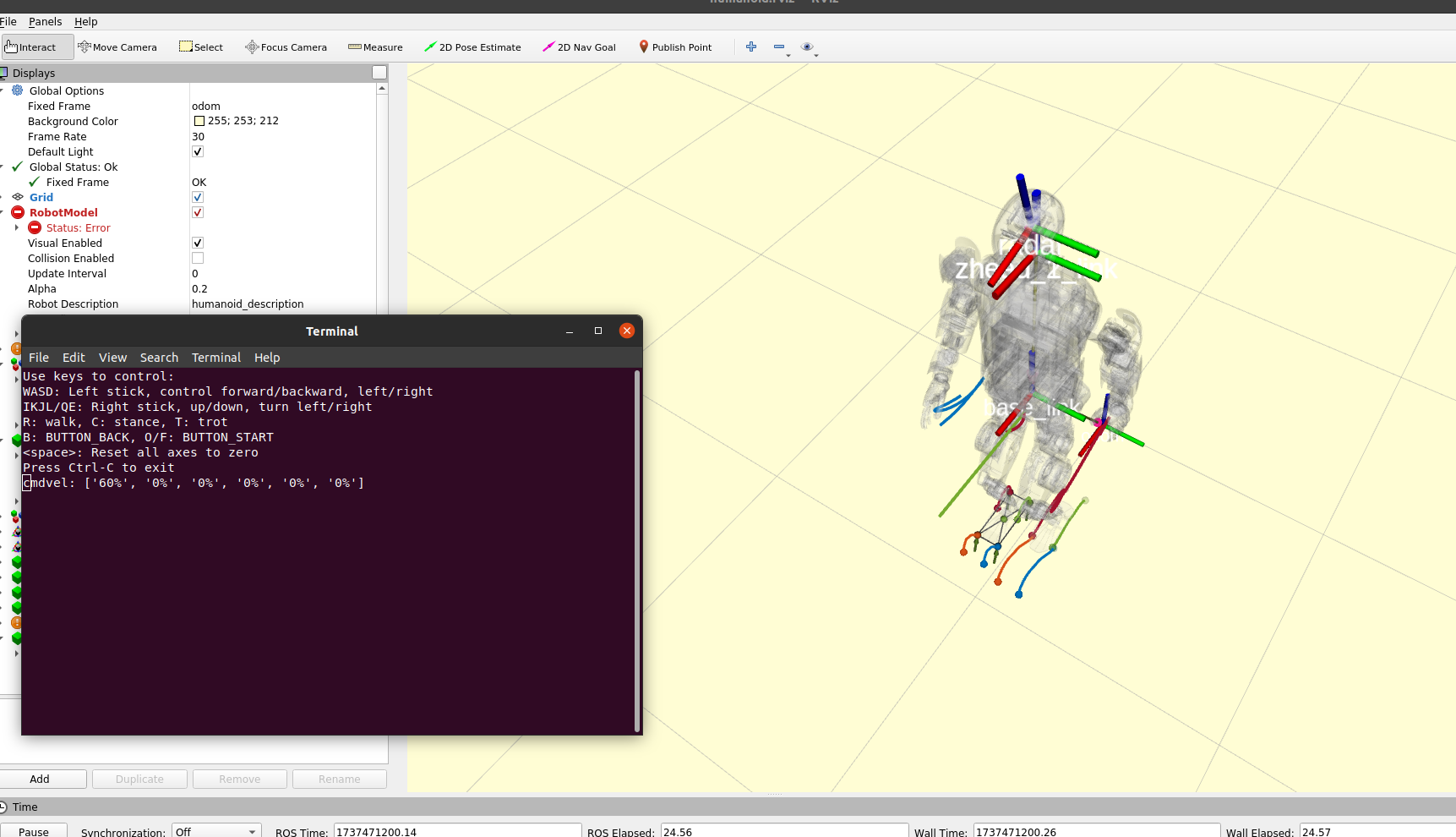
v在键盘控制手臂模式和键盘控制机器人移动模式间切换键盘控制机器人移动模式:
- 键盘
WASD为左操纵杆,控制前进/后退,左/右横移,每按动一次值增加或减小10%; - 键盘
IK和JL/QE为右操纵杆,控制上/下、左转/右转,每按动一次值增加或减小10%; - 键盘
R是walk(原地踏步);C是stance(原地站立); - 键盘空格是将左右操纵杆的输入重置为零。
- 键盘
键盘控制手臂模式:
根据键盘输入更新末端执行器
位置控制(XYZ)与姿态控制(RPY)的参数值:控制 X Y Z Roll Pitch Yaw 加 wdquij减 saeokl按
G切换控制模式,在手动控制和自动控制两者间切换位置控制(XYZ)的变化会相应修改self.eef_target_xyz的值姿态控制(RPY)的变化会相应修改self.eef_angle_manual的值
注:
self.eef_target_ypr的值为自动生成,不要手动修改Yaw的推荐赋值范围为负九十度 ~ 正九十度Pitch和Roll的推荐赋值范围为负三十度 ~ 正三十度
运行效果
键盘控制机器人移动:
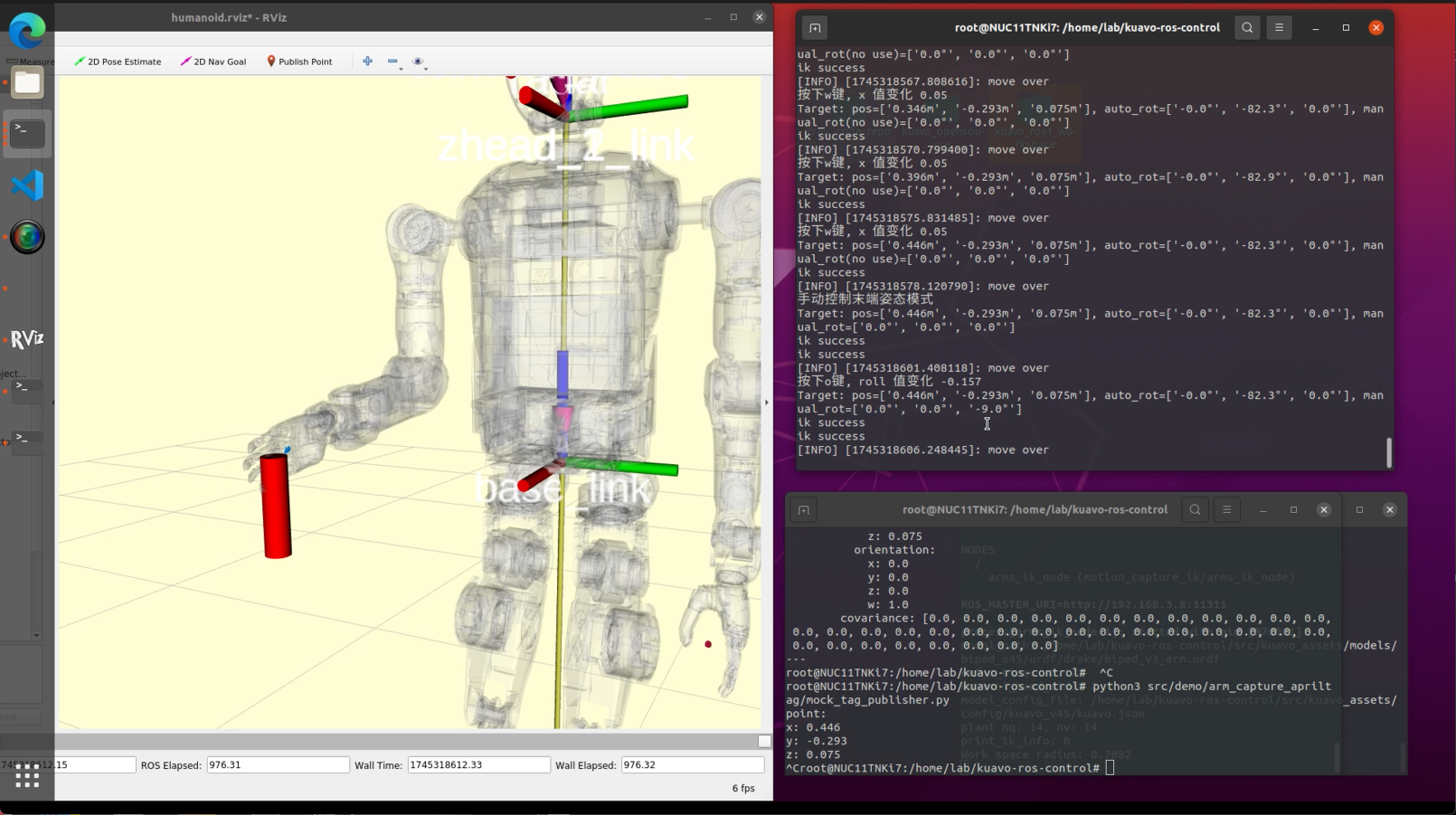
键盘控制手臂移动到指定位置:
键盘按
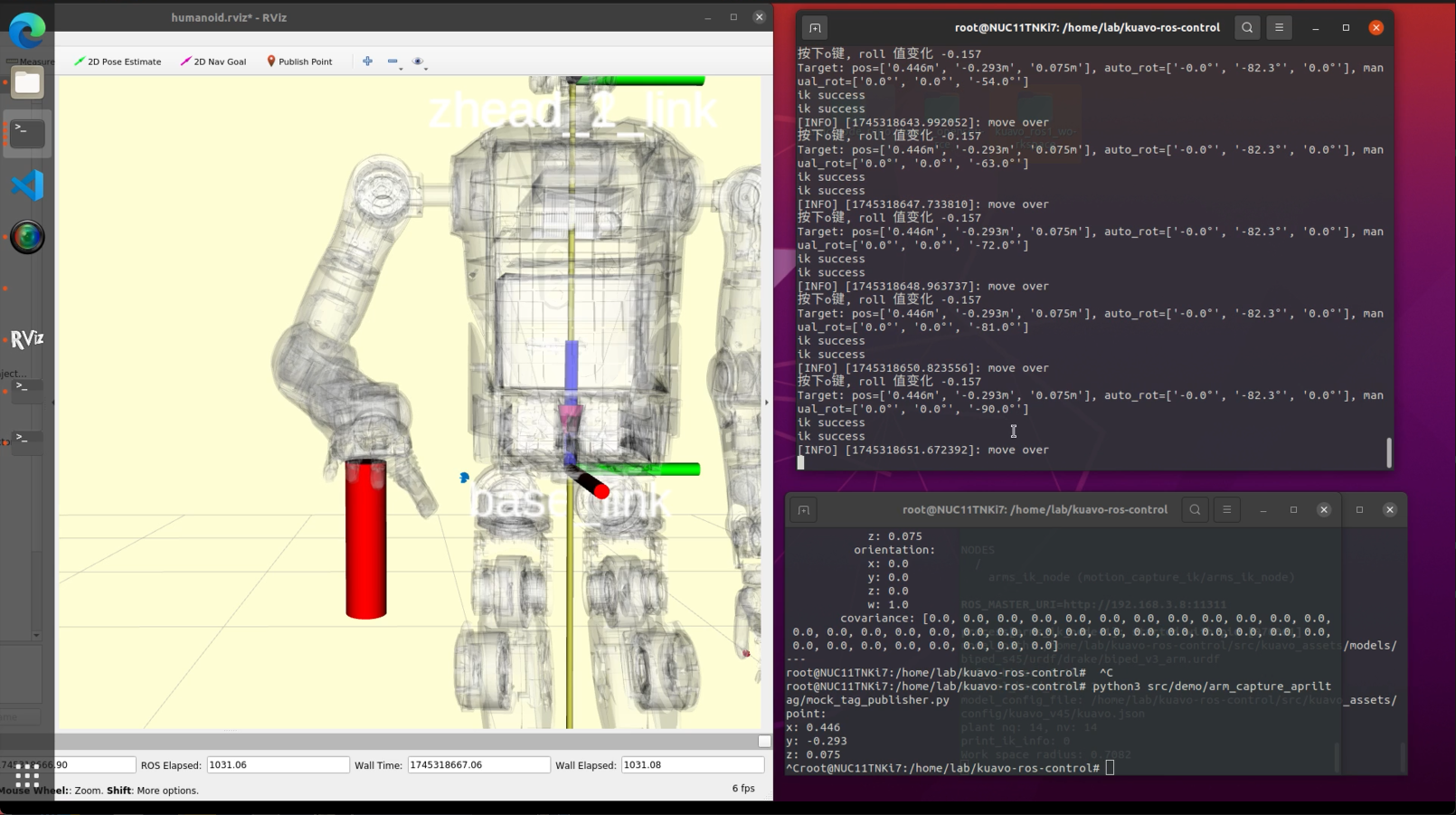
G切换至手动控制模式, 再控制手臂末端期望姿态绕新x轴旋转四十五度: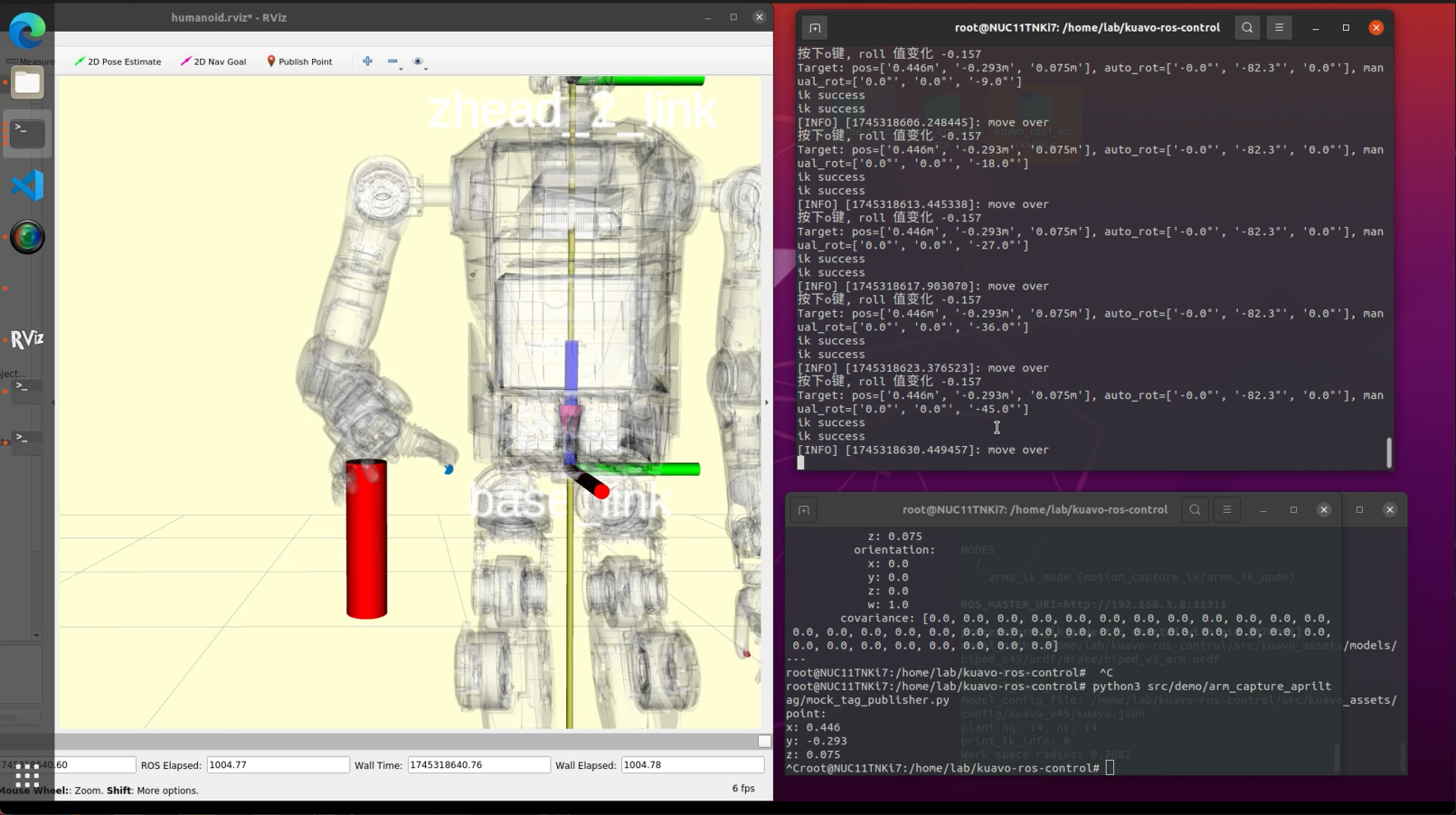
键盘控制手臂末端期望姿态绕新x轴旋转九十度: