Kuavo机器人桌面软件使用手册
1: 本工具是一个可视化的机器人动作编辑软件,支持机械臂、手指和头部的动作编辑,可以直观地设计和预览机器人动作,并导出为可编辑的json动作文件。
2: 可以连接机器人以便实现下面功能(不连接机器人也可以编辑动作):机器人的wifi连接以及切换,下载日志分析定位问题,遥控器语音动作文件快速更换,以及代码版本管理功能
3:编辑完动作以后可以记住当前目录位置,直接导入设计好的动作,使用遥控器快捷键实现真实机器人演示(建议先仿真验证动作,在迁移到实机)
下载和安装
工具是Windows平台下的应用程序,下载exe文件即可使用。
- 下载地址为: Kuavo机器人桌面软件
- 下载完成后,双击exe文件,即可运行,运行打开后如下图所示:

动作设计
使用须知
- 电机的旋转方向和机器人的坐标系正方向一致,符合右手定则。用右手握住电机旋转轴,让拇指指向旋转轴的正方向(旋转轴正方向和机器人的坐标系正方向一致)其余四指的弯曲方向表示旋转的正方向。
- 时间轴上的帧率为100帧/秒
- 两个动作之间要有一定时间间隔,不然动作不能完成执行
- 建议在编辑前保存当前工作,避免意外丢失
- 动作设计时注意机械臂的运动范围限制,避免碰撞
- 工具界面说明:
- 右侧区域:3D机器人模型预览
- 头部时间轴:用于编辑关键帧
- 右下角:基础动作库
- 右上角工具栏:包含播放、保存等功能按钮
- 不连接机器人也可以编辑动作
机器人型号选择
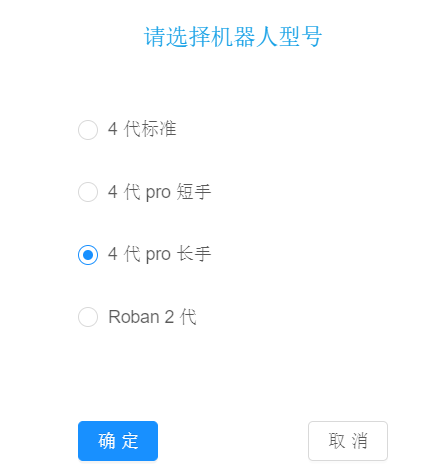
根据实际需要选择适合的版本,本案例为4pro短手示例,但对于不同机器人版本,操作不会发生变化
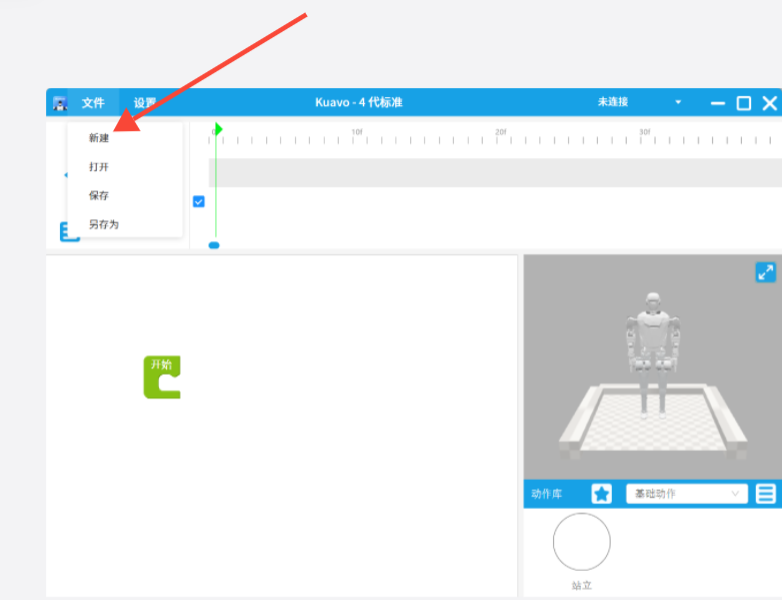
- 点击文件,然后点击新建即可选择机器人版本
手臂关节点编辑学习
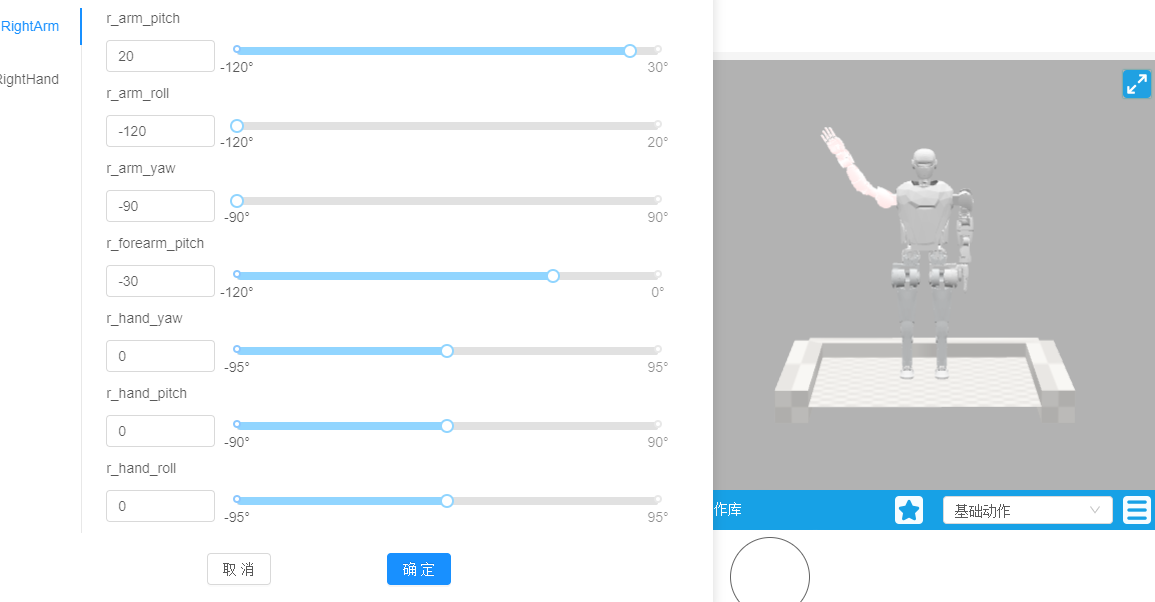
- 首先单击机器人手臂,左侧会弹出机器人可以编辑的关节点,如下图所示:
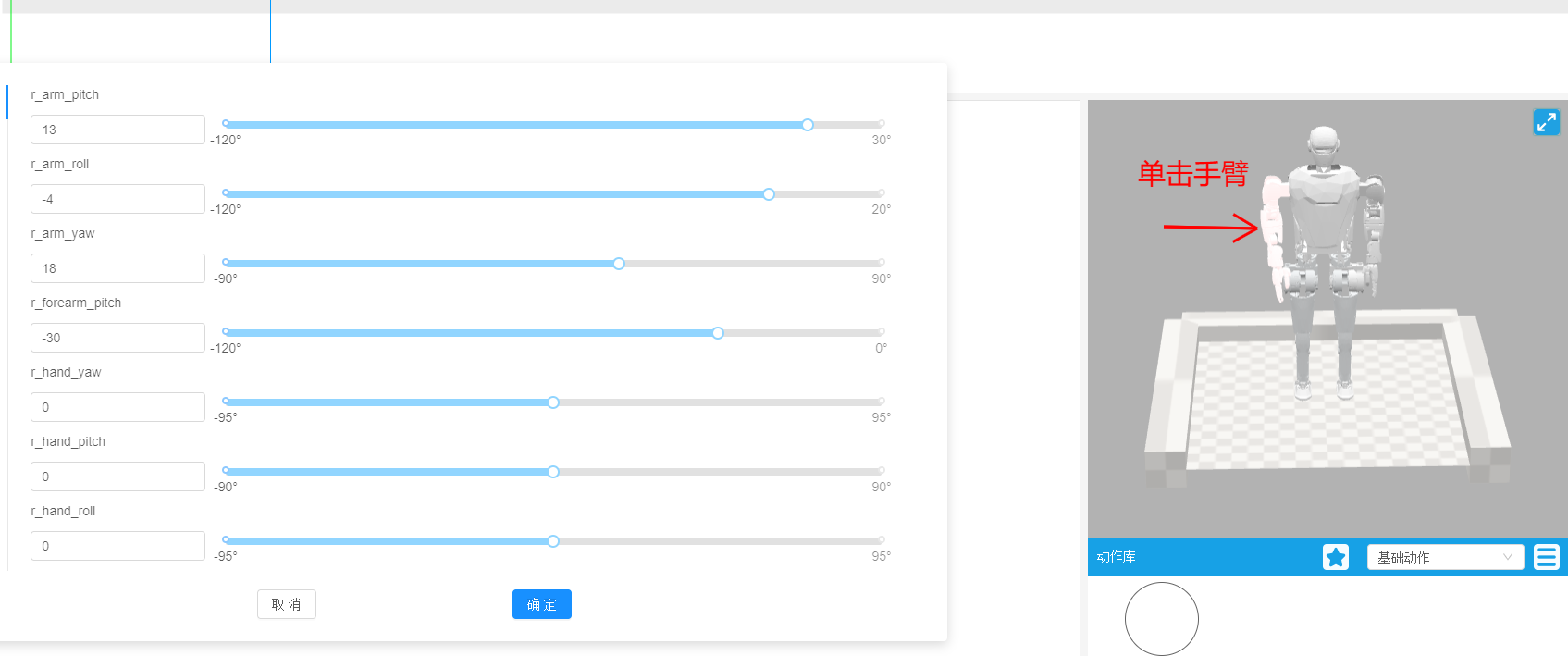
- 为了更直观地学习和编辑动作,在开始编辑前可以将各个关节的角度归零。这是因为在机械臂的坐标系中,一个关节的角度变化会影响其他关节的运动。当所有关节角度归零时,可以更清晰地观察和理解单个关节的独立运动效果,了解单个关节的转动情况后,可以开始编辑动作。
实际动作设计
机器人手臂的动作是由多个独立的关节动作组合而成的。每个关节的动作可以看作是一个子动作,这些子动作按照一定的顺序和逻辑组合在一起,形成一个完整的手臂动作。例如,挥手动作可以分解为肩关节的抬起、肘关节的弯曲和手腕的旋转等多个子动作。通过精确控制每个关节的运动,可以实现复杂的手臂动作。下面通过一个案例来说明如何设计挥手动作。
设置机械臂角度,然后点击确定:
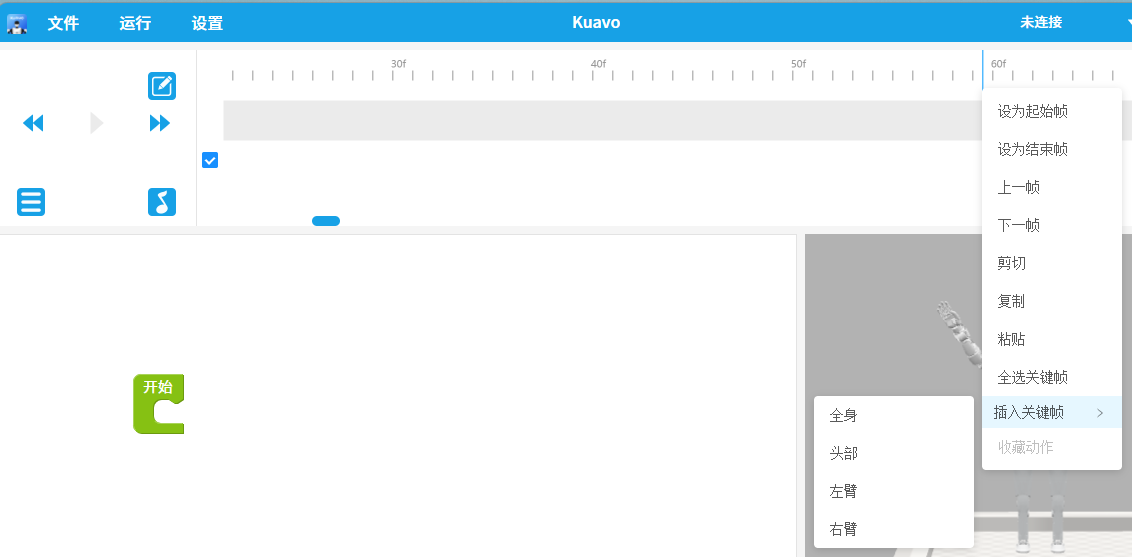
- 在约60帧位置右键鼠标,选择插入关键帧,然后点击全身:
- 此时再次右键,收藏动作亮起,点击收藏动作,将动作命名为挥手1:

- 此时右下角基础动作库中会多出一个动作:

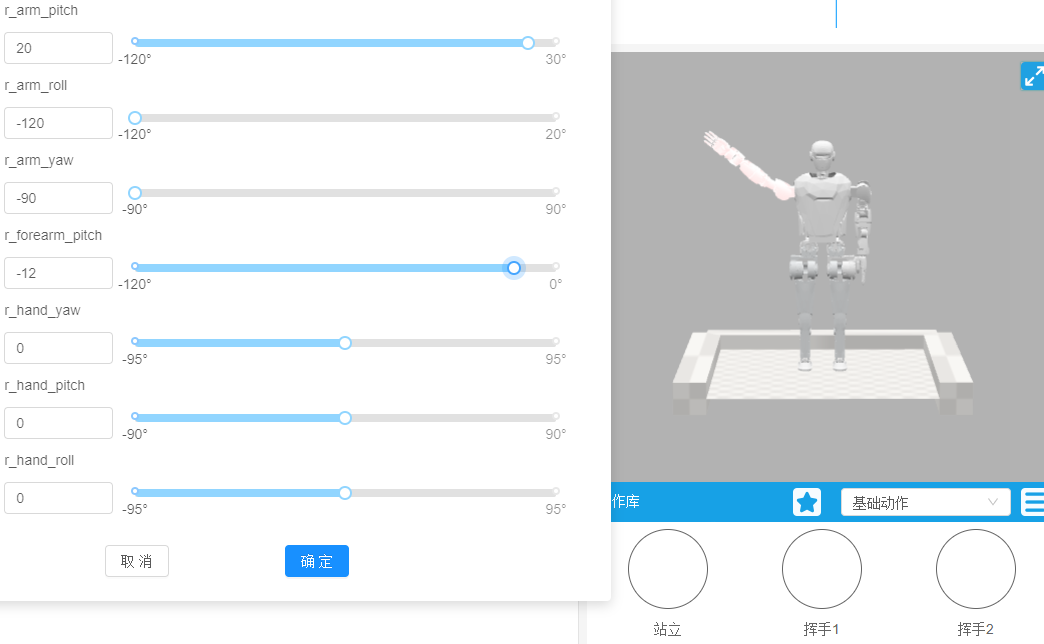
- 开始设计第二个子动作,操作流程同上,以下给出机械臂角度和关键帧数,具体操作步骤参考挥手1:
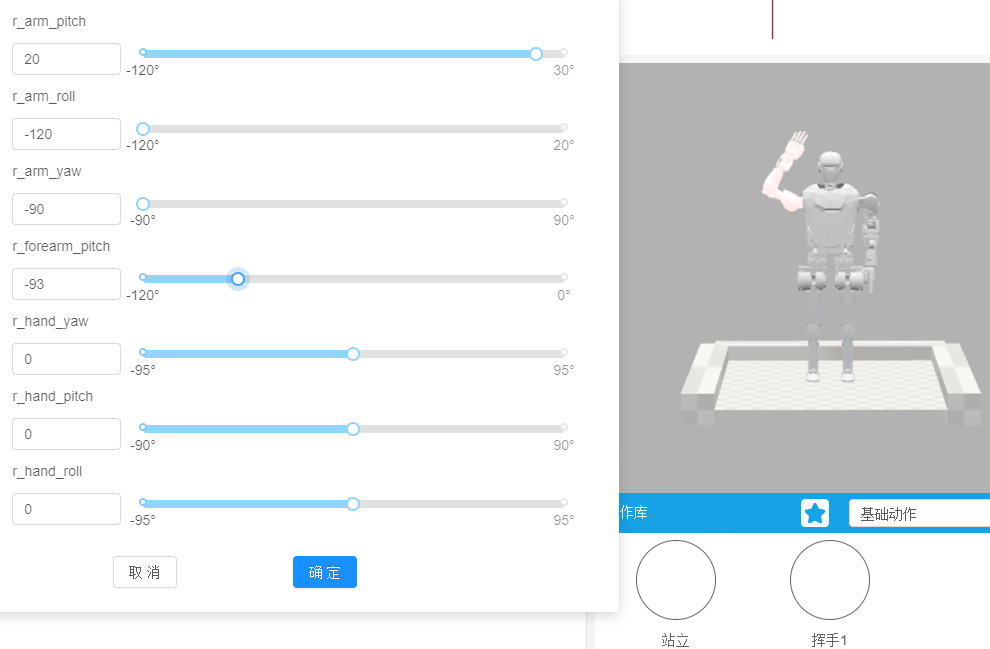
- 关键帧数155左右:

- 收藏动作,命名为挥手2。
- 现在开始设计第三个子动作,流程如上。角度:
- 关键帧数240:

- 收藏动作,命名为挥手3。
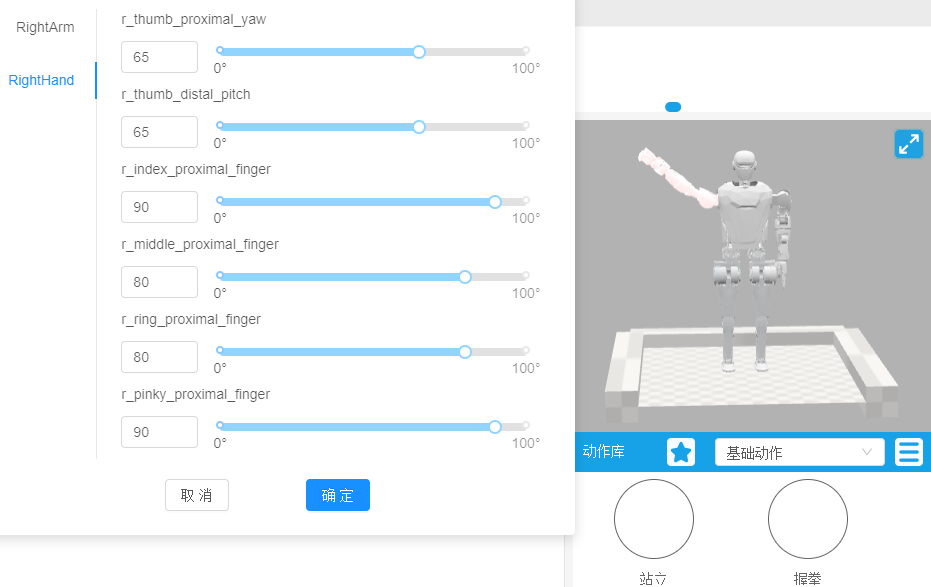
手指控制
工具还可以实现手指和头部的控制,和手臂的控制类似,手指的关节点一共只有6个,大拇指两个,其余手指只有一个关节点,头部只有两个关节点,所以头部和手指的控制相对简单。
接着上面的240帧,在320帧插入一个握拳动作,关节点角度如下:
头部控制
- 在380帧插入一个头部抬头动作,关节点角度如下:
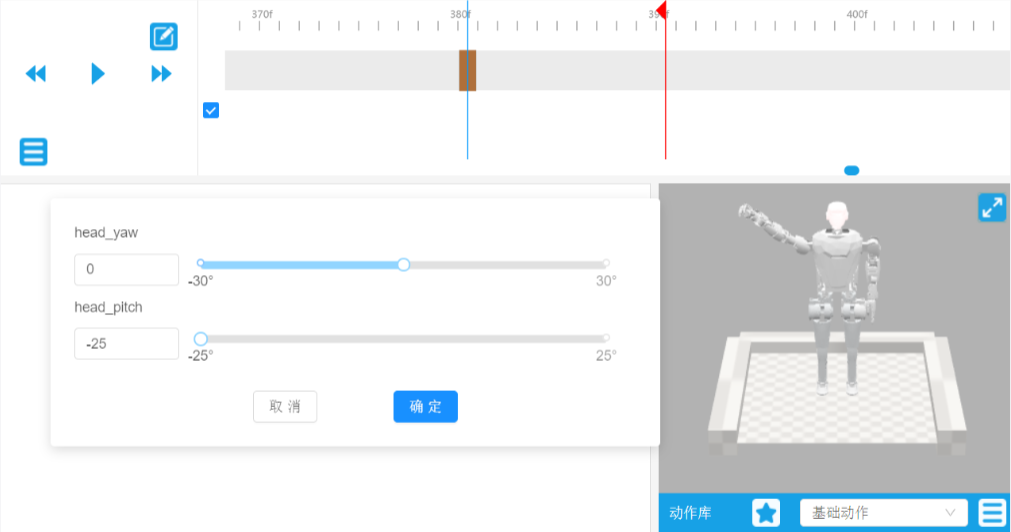
- 最后在最后一个动作帧右边一点,设置为结束帧,如图中红线所示:

- 现在点击播放按钮即可播放挥手握拳抬头动作。

- 单击下图按钮,然后点击生成模块,将模块命名为挥手握拳抬头:

- 此时在界面中会出现一个挥手模块握拳抬头模块,各个模块间可以相互组合。
- 再次单击下图按钮,然后点击导出动作,即可生成程序可以读取的.tact文件:
- 生成文件如下图所示:

连接机器人
如希望实现此功能,先在机器人下位机运行下面命令
sudo su
cd /home/lab/kuavo-ros-opensource/src/manipulation_nodes/planarmwebsocketservice/service/
chmod +x websocket_deploy_script.sh
./websocket_deploy_script.sh
# 等待上面成功运行,然后运行下面命令
cd /home/lab/kuavo-ros-opensource/tools/user_groups_tools/
chmod +x add_user_groups.sh
./add_user_groups.sh
热点连接和WIFI连接
- 热点连接是指Windows电脑连接上机器人发出的热点,热点名为下面格式(“机器人编号”+的热点):

WIFI连接是指机器人下位机连接WiFi和Windows连接WIFI是同一个
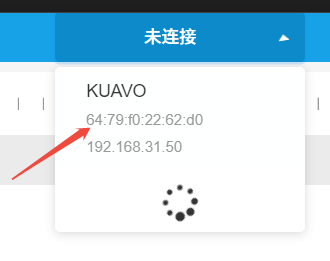
上面两种情况,实现其中一种即可,此时鼠标左键单击:

- 会弹出机器人广播的IP,点击即可连接:
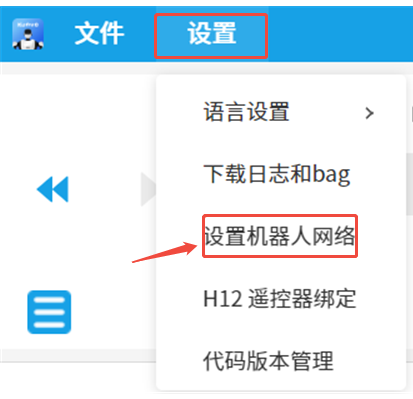
设置机器人网络
- 如果是第一次拿到机器人,可以选择先连接机器人热点,在选择设置然后设置机器人网络,切换到WIFI,Windows的热点也要对应更换为WIFI:
- 当然,如果此时通过WIFI连接的机器人,也可以通过设置网络切换机器人WiFi,但随后Windows的WIFI也要对应更换。
下载日志和rosbag
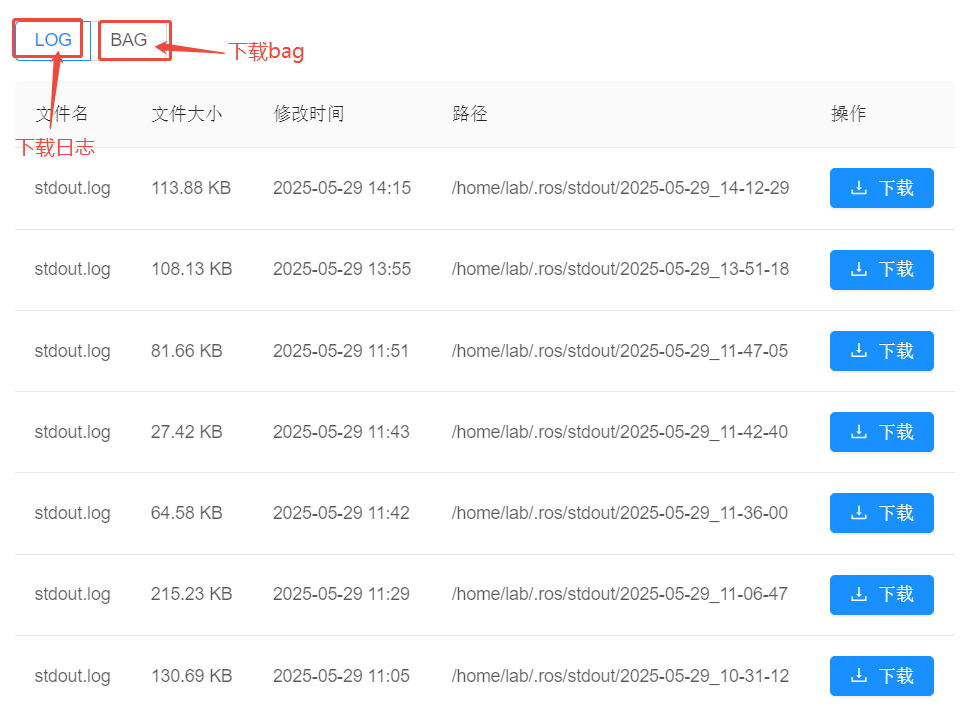
- 下载日志通常是机器人出现异常时才需要进行的操作,不管是日志或者rosbag都是根据时间排序,当机器人出现问题时先查看但前时间,方便后续提取下载日志和rosbag。
- 点击设置,然后点击下载日志和bag,找到对应时间的日志和bag即可,日志只会产生一份,但bag为防止太大,会在500M左右裁剪一次,所以bag有多个,下载时下载出问题相应时间段的即可。
H12遥控器语音动作配置
- 需要确保本身有遥控器控制语音动作功能,才能进行下面操作
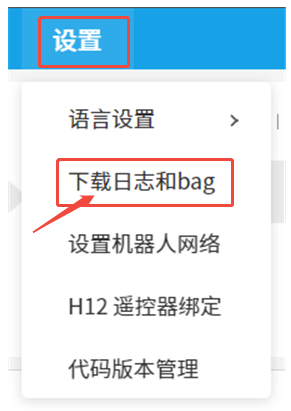
- 点击设置,然后点击h12遥控器绑定:

- 包含下面功能:语音动作恢复出厂设置(三套)、自定义语音动作文件导入
- 如需恢复出厂设置,直接点击即可,成功后有下面三套配套动作语音
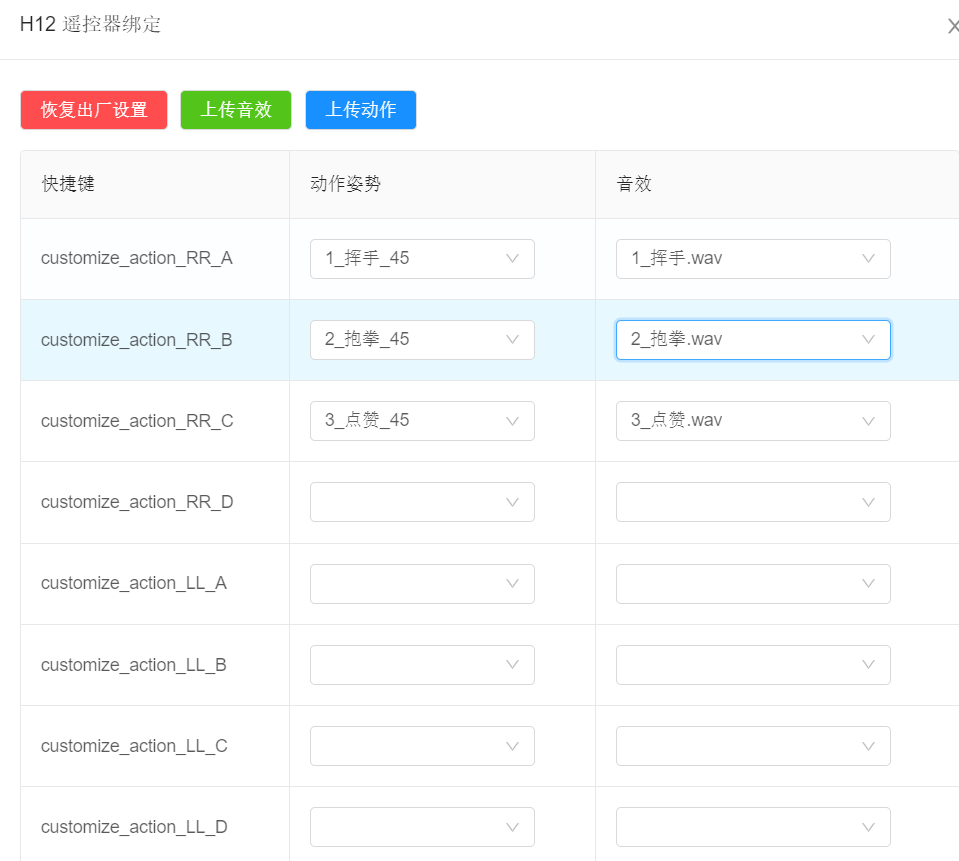
- 之前设计的动作此时已经可以用到,再提前准备好配套语音文件,导入语音动作文件,替换即可
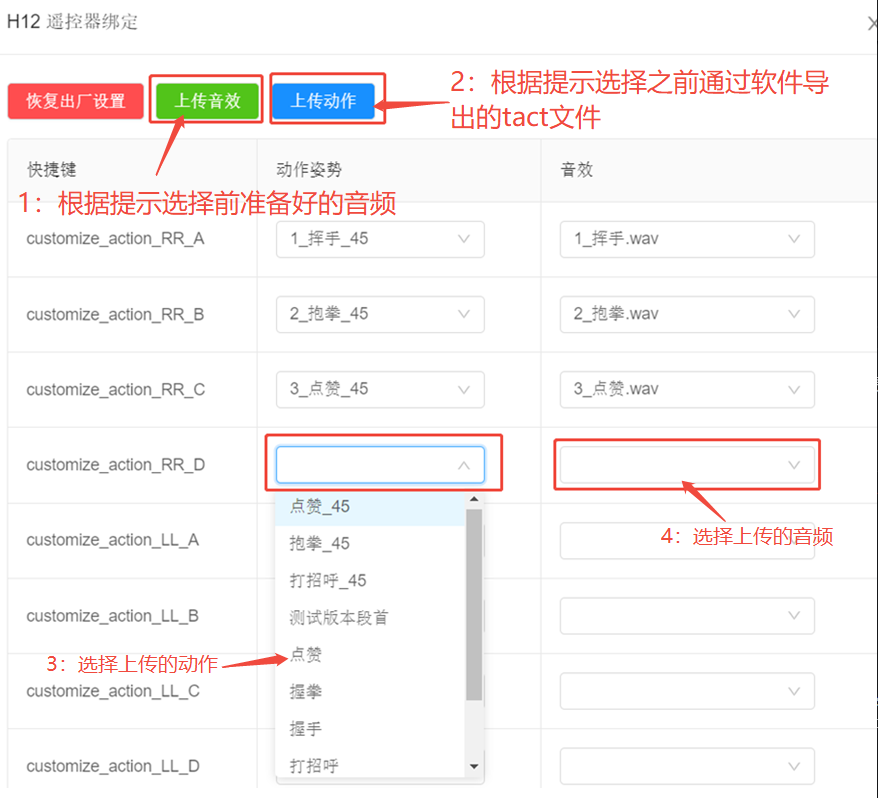
- 设置完成之后,点击确认即可

- 此时对应遥控器快捷键会有相应动作
在机器人打开时h12的E、F拨杆位于两边,RR_A代表把E、F都拨到最右边,然后按A就能播放对应动作和语音,而LL_D就是把E、F都拨到最左边,然后按D,其余动作语音也是同理,RR意思是right,LL意思是lift。
- E和F拨杆位置:

代码版本管理
注意事项
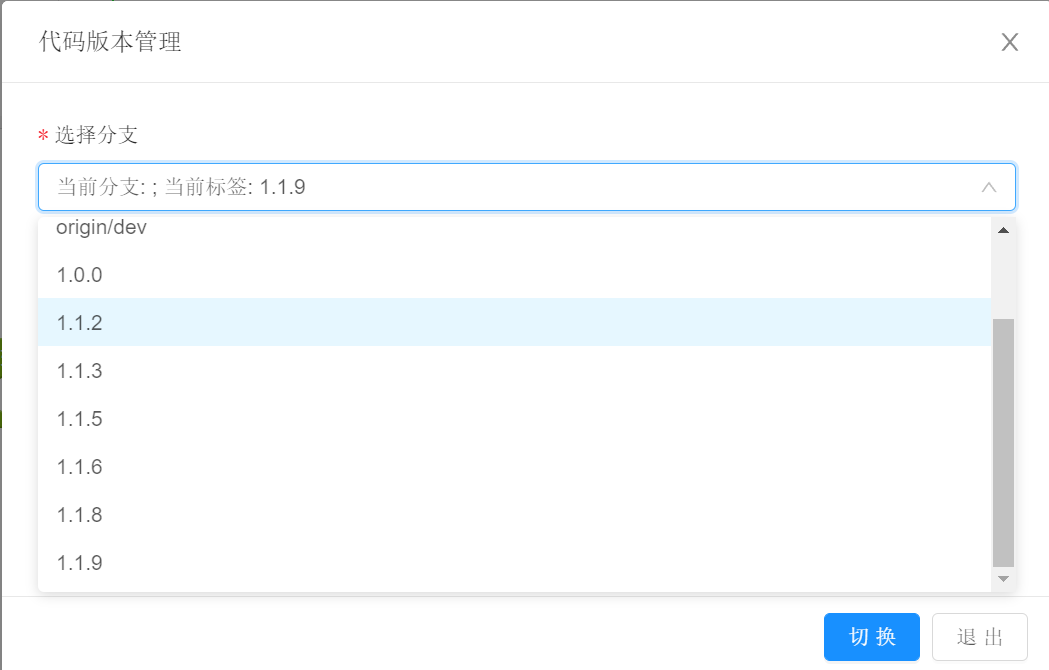
- 用户使用时只能选择tag进行切换, 否则可能会存在问题
- tag的标准格式为x.x.x , 推荐更新最新的版本
- 代码更新会自动覆盖之前的代码, 用户自己的代码需要自行备份
操作步骤
- 选择设置,然后选择代码版本管理,弹出下面界面,
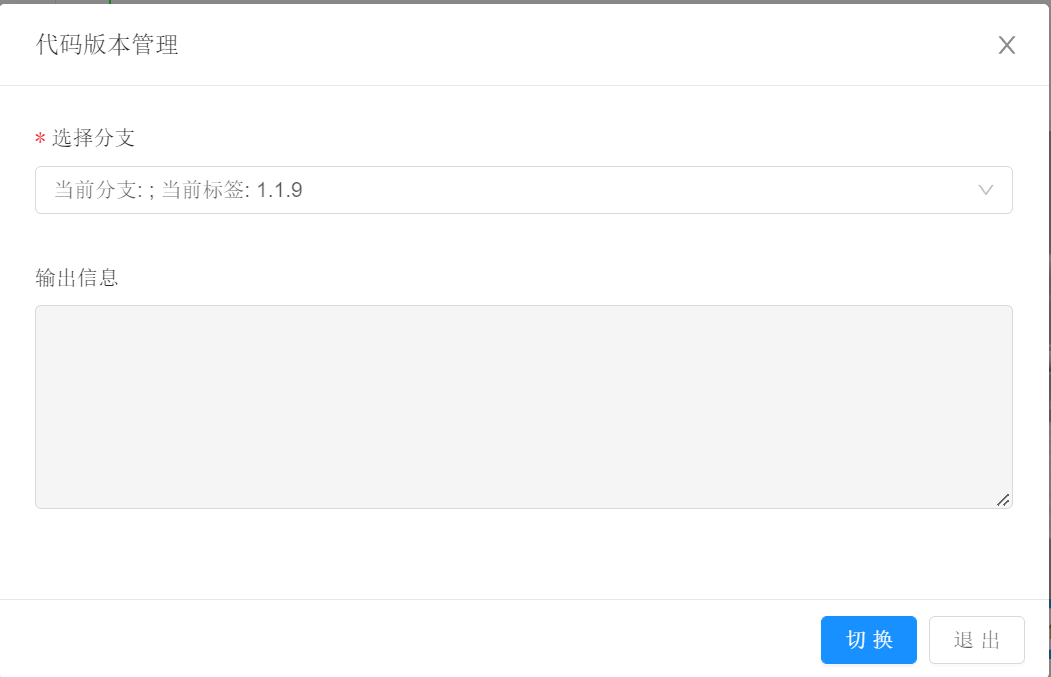
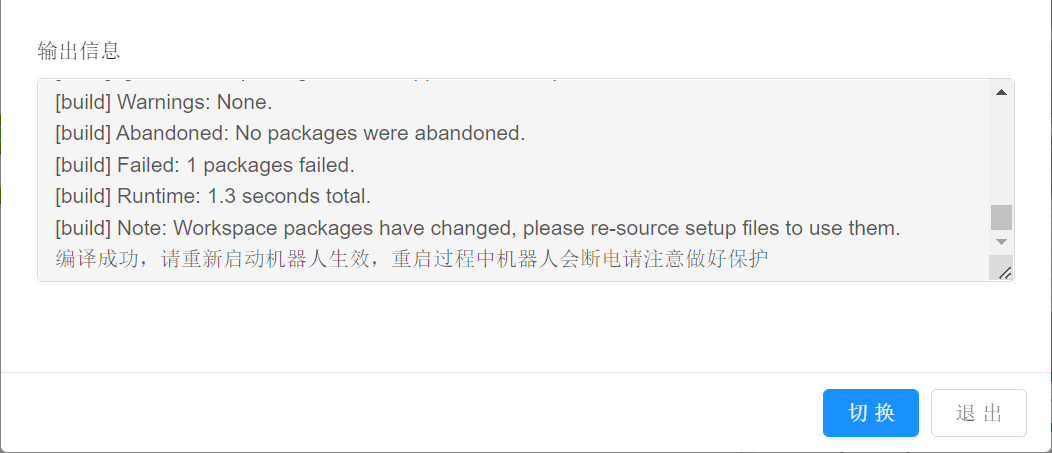
- 选择所需版本,点击切换,即可自动切换分支并编译代码
- 若输出信息正常,即为切换成功