手臂动作编辑工具使用手册
本工具是一个可视化的机器人动作编辑软件,支持机械臂、手指和头部的动作编辑,可以直观地设计和预览机器人动作,并导出为可编辑的json动作文件。
描述
工具用于实现机器人机械臂的一些常规动作预设,生成对应帧的关节角度数据,并保存为.tact文件,后续可以通过程序调用,生成的动作可以有很多,如挥手、欢迎、招手等。
下载和安装
工具是Windows平台下的应用程序,下载exe文件即可使用。
- 下载地址为: 手臂编辑工具
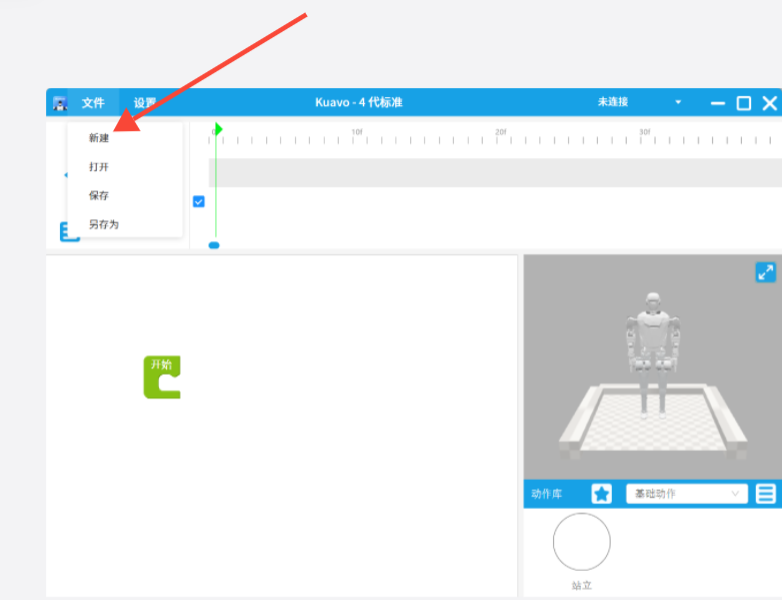
- 下载完成后,双击exe文件,即可运行,运行打开后如下图所示:

使用
使用须知
- 电机的旋转方向和机器人的坐标系正方向一致,符合右手定则。用右手握住电机旋转轴,让拇指指向旋转轴的正方向(旋转轴正方向和机器人的坐标系正方向一致)其余四指的弯曲方向表示旋转的正方向。
- 时间轴上的帧率为100帧/秒
- 建议在编辑前保存当前工作,避免意外丢失
- 动作设计时注意机械臂的运动范围限制,避免碰撞
- 工具界面说明:
- 右侧区域:3D机器人模型预览
- 头部时间轴:用于编辑关键帧
- 右下角:基础动作库
- 右上角工具栏:包含播放、保存等功能按钮
机器人型号选择
根据实际需要选择适合的版本,本案例为4pro短手示例,但对于不同机器人版本,操作不会发生变化
- 点击文件,然后点击新建即可选择机器人版本
手臂关节点编辑学习

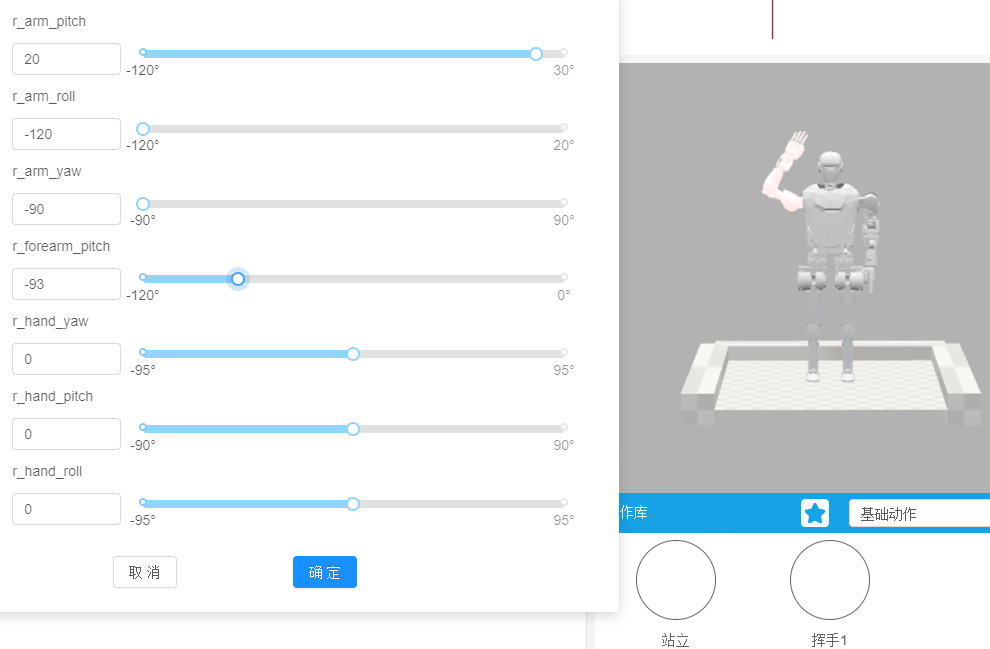
- 首先单击机器人手臂,左侧会弹出机器人可以编辑的关节点,如下图所示:
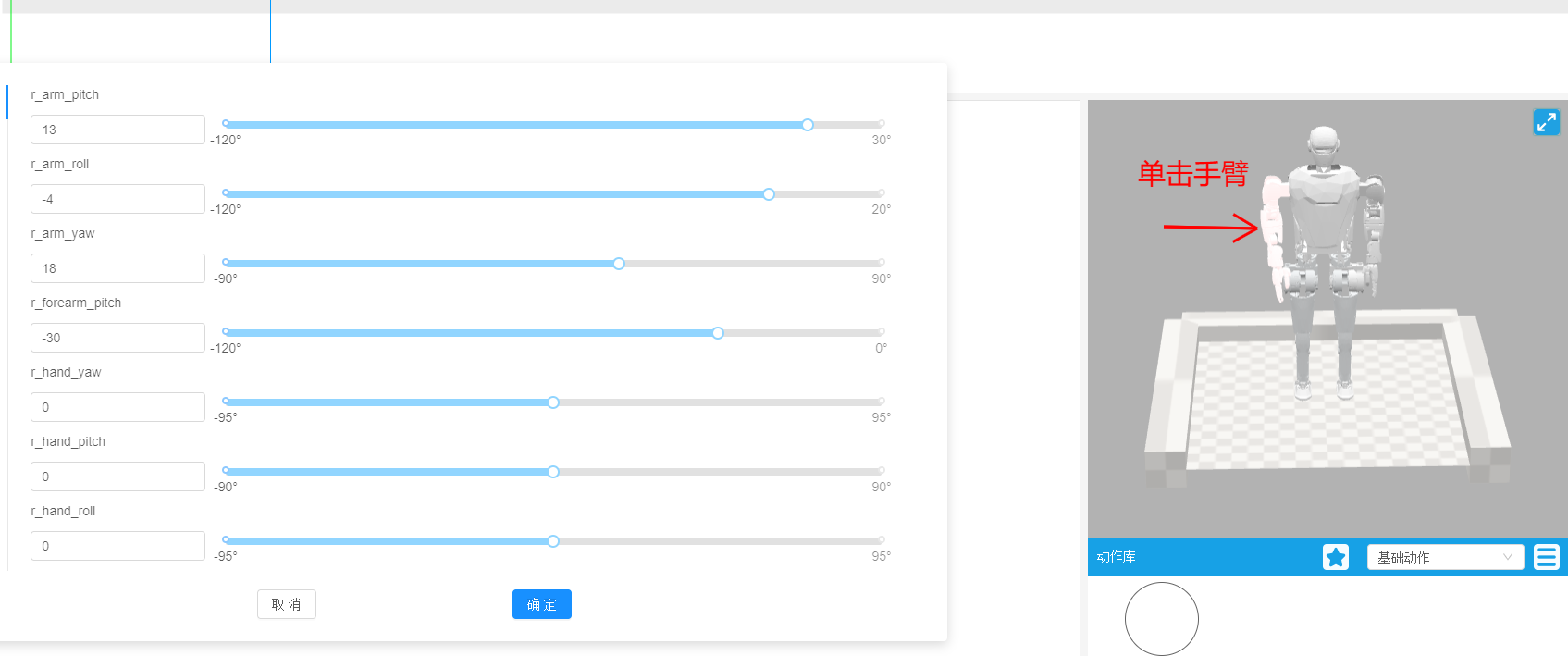
- 为了更直观地学习和编辑动作,在开始编辑前可以将各个关节的角度归零。这是因为在机械臂的坐标系中,一个关节的角度变化会影响其他关节的运动。当所有关节角度归零时,可以更清晰地观察和理解单个关节的独立运动效果,了解单个关节的转动情况后,可以开始编辑动作。
实际动作设计
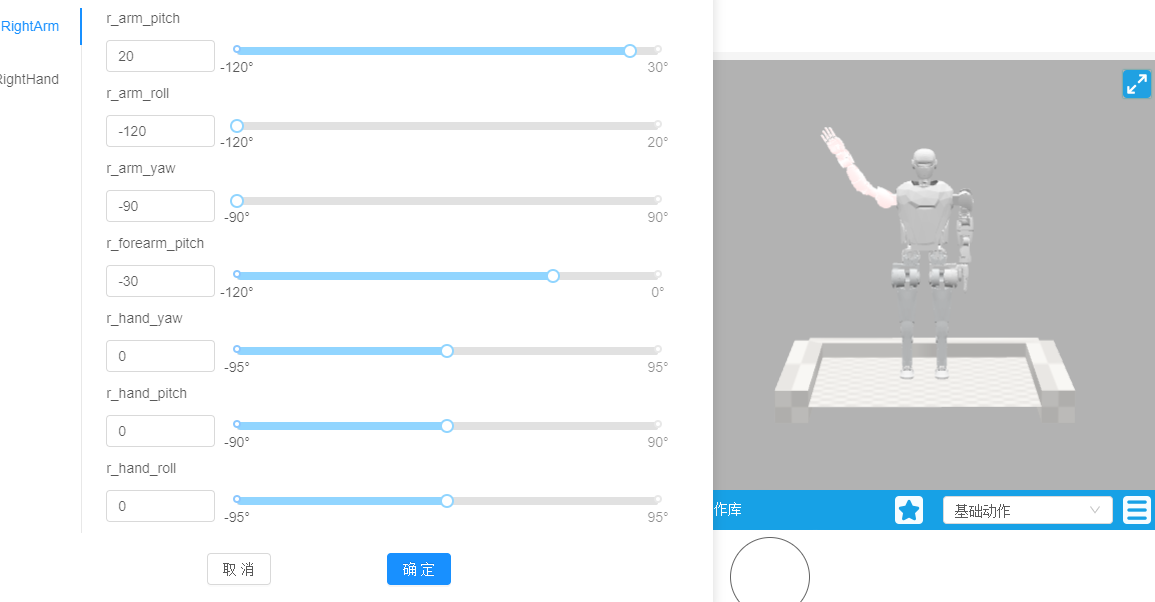
机器人手臂的动作是由多个独立的关节动作组合而成的。每个关节的动作可以看作是一个子动作,这些子动作按照一定的顺序和逻辑组合在一起,形成一个完整的手臂动作。例如,挥手动作可以分解为肩关节的抬起、肘关节的弯曲和手腕的旋转等多个子动作。通过精确控制每个关节的运动,可以实现复杂的手臂动作。下面通过一个案例来说明如何设计挥手动作。
设置机械臂角度,然后点击确定:
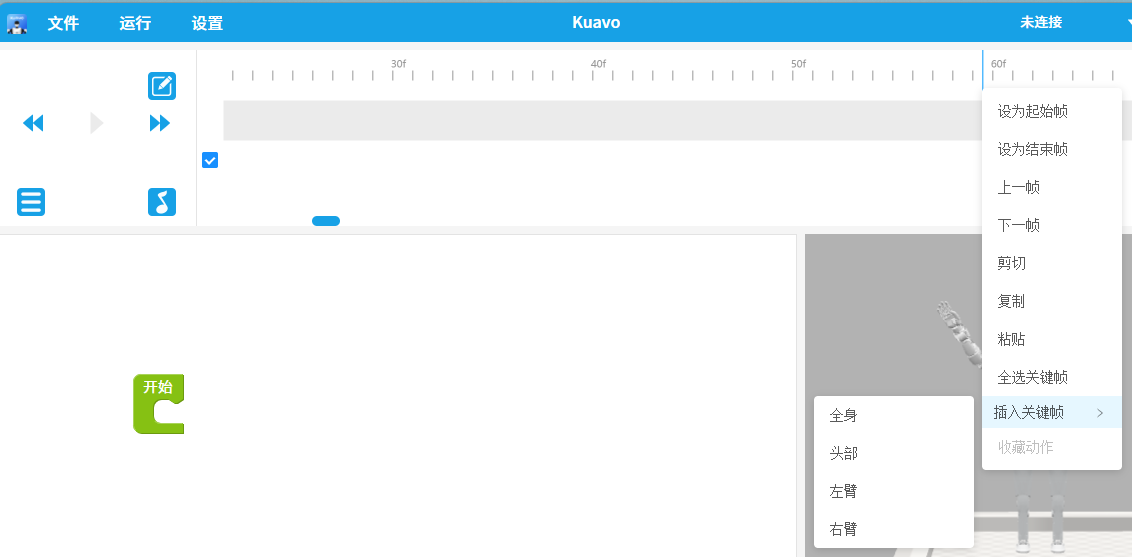
- 在约60帧位置右键鼠标,选择插入关键帧,然后点击全身:
- 此时再次右键,收藏动作亮起,点击收藏动作,将动作命名为挥手1:

- 此时右下角基础动作库中会多出一个动作:

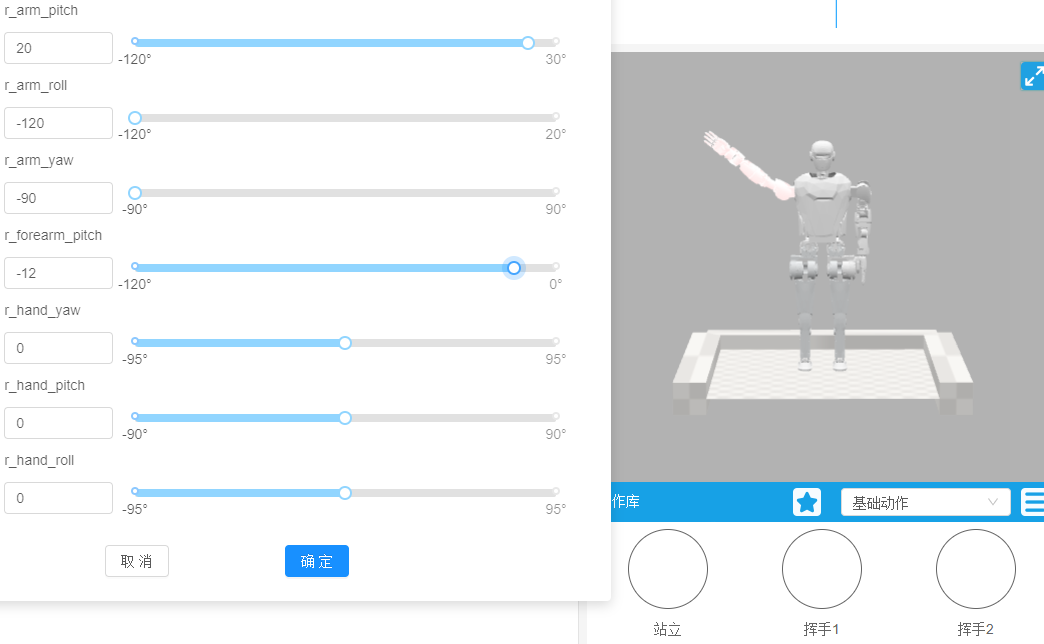
- 开始设计第二个子动作,操作流程同上,以下给出机械臂角度和关键帧数,具体操作步骤参考挥手1:
- 关键帧数155左右:

- 收藏动作,命名为挥手2。
- 现在开始设计第三个子动作,流程如上。角度:
- 关键帧数240:

- 收藏动作,命名为挥手3。
手指控制
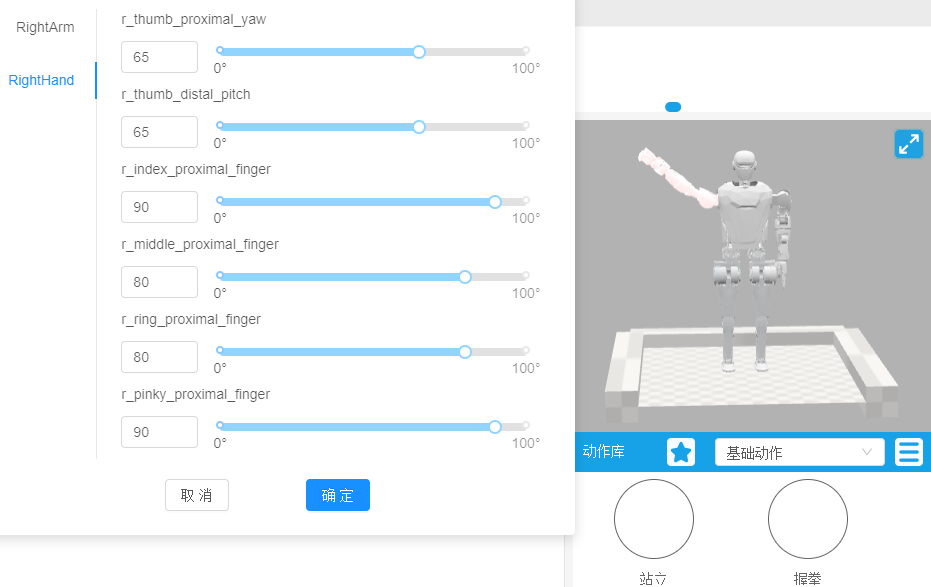
工具还可以实现手指和头部的控制,和手臂的控制类似,手指的关节点一共只有6个,大拇指两个,其余手指只有一个关节点,头部只有两个关节点,所以头部和手指的控制相对简单。
接着上面的240帧,在320帧插入一个握拳动作,关节点角度如下:
头部控制
- 在380帧插入一个头部抬头动作,关节点角度如下:
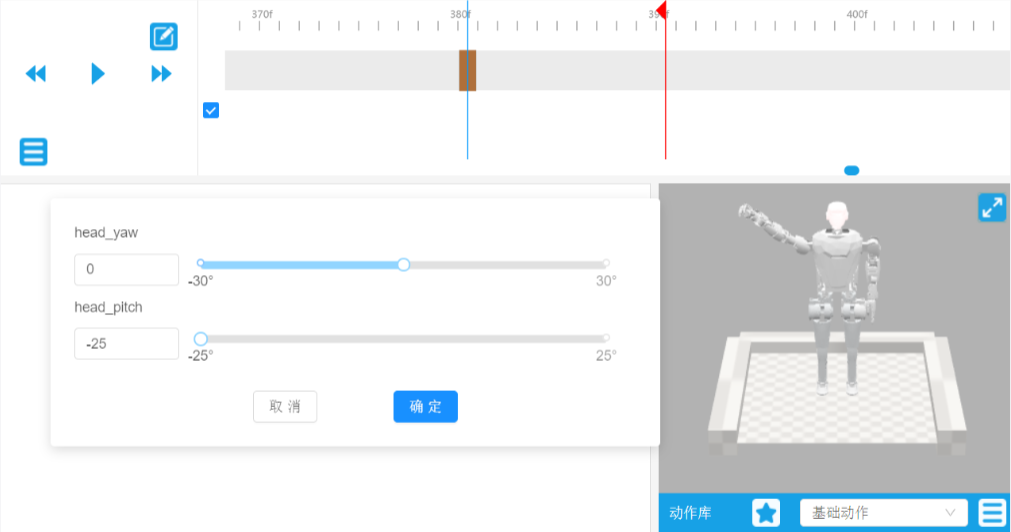
- 最后在最后一个动作帧右边一点,设置为结束帧,如图中红线所示:

- 现在点击播放按钮即可播放挥手握拳抬头动作。

- 单击下图按钮,然后点击生成模块,将模块命名为挥手握拳抬头:

- 此时在界面中会出现一个挥手模块握拳抬头模块,各个模块间可以相互组合。
- 再次单击下图按钮,然后点击导出动作,即可生成程序可以读取的.tact文件:
- 生成文件如下图所示:

应用
- 将生成的.tact文件复制到指定路径:
<kuavo-ros-opensource>/src/demo/examples_code/hand_plan_arm_trajectory/action_files - 修改配置文件:
- 打开
<kuavo-ros-opensource>/src/demo/examples_code/hand_plan_arm_trajectory/robot_comprehensive_demo.py - 更新文件路径:
file_path = rospy.get_param('~tact_file', './action_files/你的动作文件名.tact')
- 打开
- 注意事项:
- 手臂、手指、头部控制使用不同的话题
- 运行前确保机器人处于安全位置