故障排查
硬件
一、EC 主站无法运行
找不到从站:
- 检查 XML 文件: 确认使用了正确的 XML 配置文件,该文件定义了 EtherCAT 网络的拓扑结构。
- 检查 EtherCAT 网线: 检查网线连接是否牢固,是否存在断开或接触不良的情况。可以尝试更换线材,如果更换后还是显示断连,则可能为驱动器插座损坏,需要更换驱动器
DCM out (超时):
- 程序卡死: 检查程序是否存在死循环或阻塞,导致进程卡死。
- CPU 内核隔离: 确认已进行 CPU 内核隔离,避免其他进程干扰实时控制程序。
- 程序版本: 确认使用的是最新版本的程序,老版本程序可能存在已知的 bug。
通讯丢帧:
- 网线连接: 检查网线连接是否牢固可靠。
- 网线质量: 使用高质量的 EtherCAT 网线,避免劣质网线导致的通讯问题。
- 驱动器座子虚焊: 检查驱动器座子是否存在虚焊。
- 驱动器座子: 检查驱动器座子是否存在机械性损伤或接触不良。
软件
一、docker 编译报错
- catkin build humanoid_humanollers报关于motion_capture_ik相关的错:
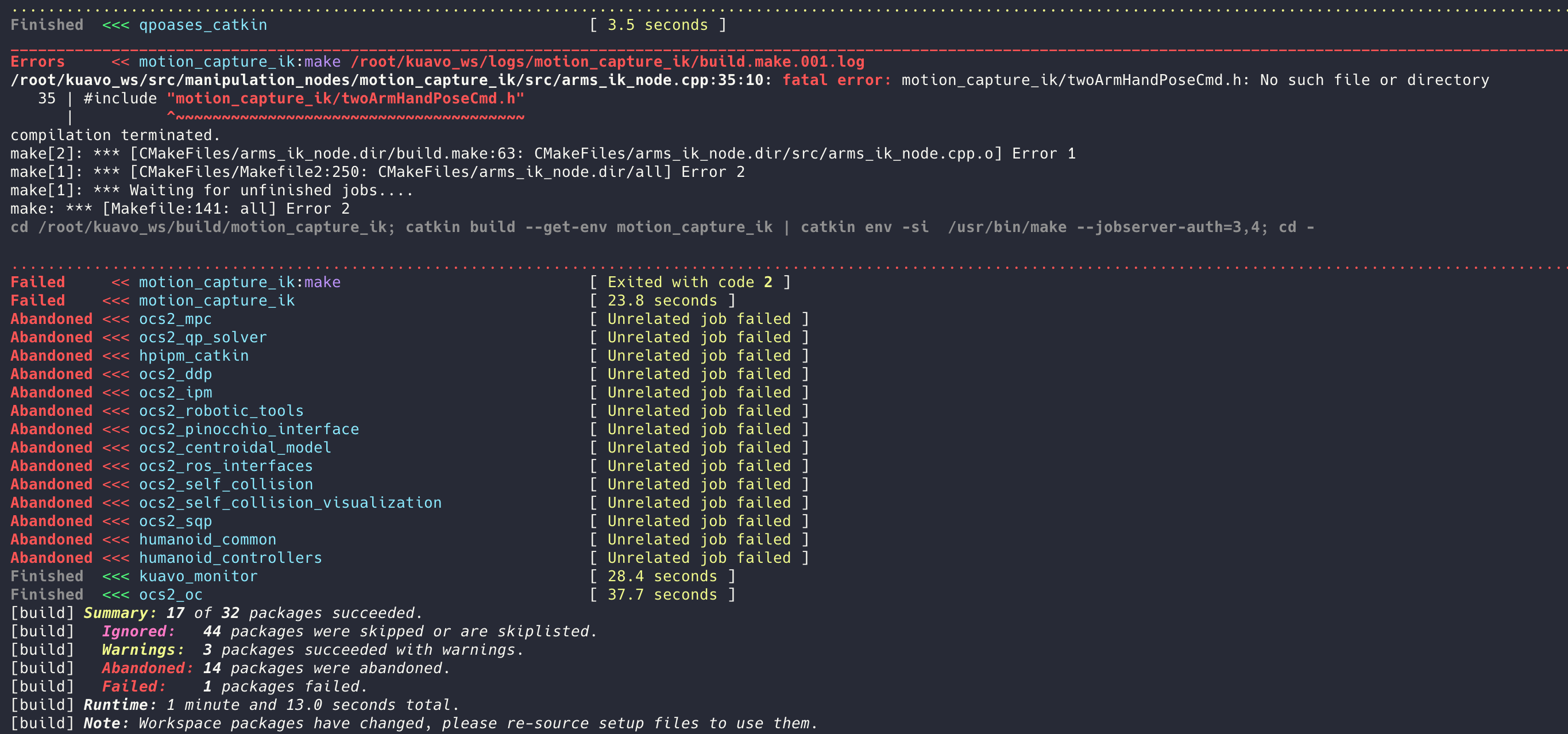
catkin build motion_capture_ik 单独编译这个功能包
- 报关于缺少.so文件的错
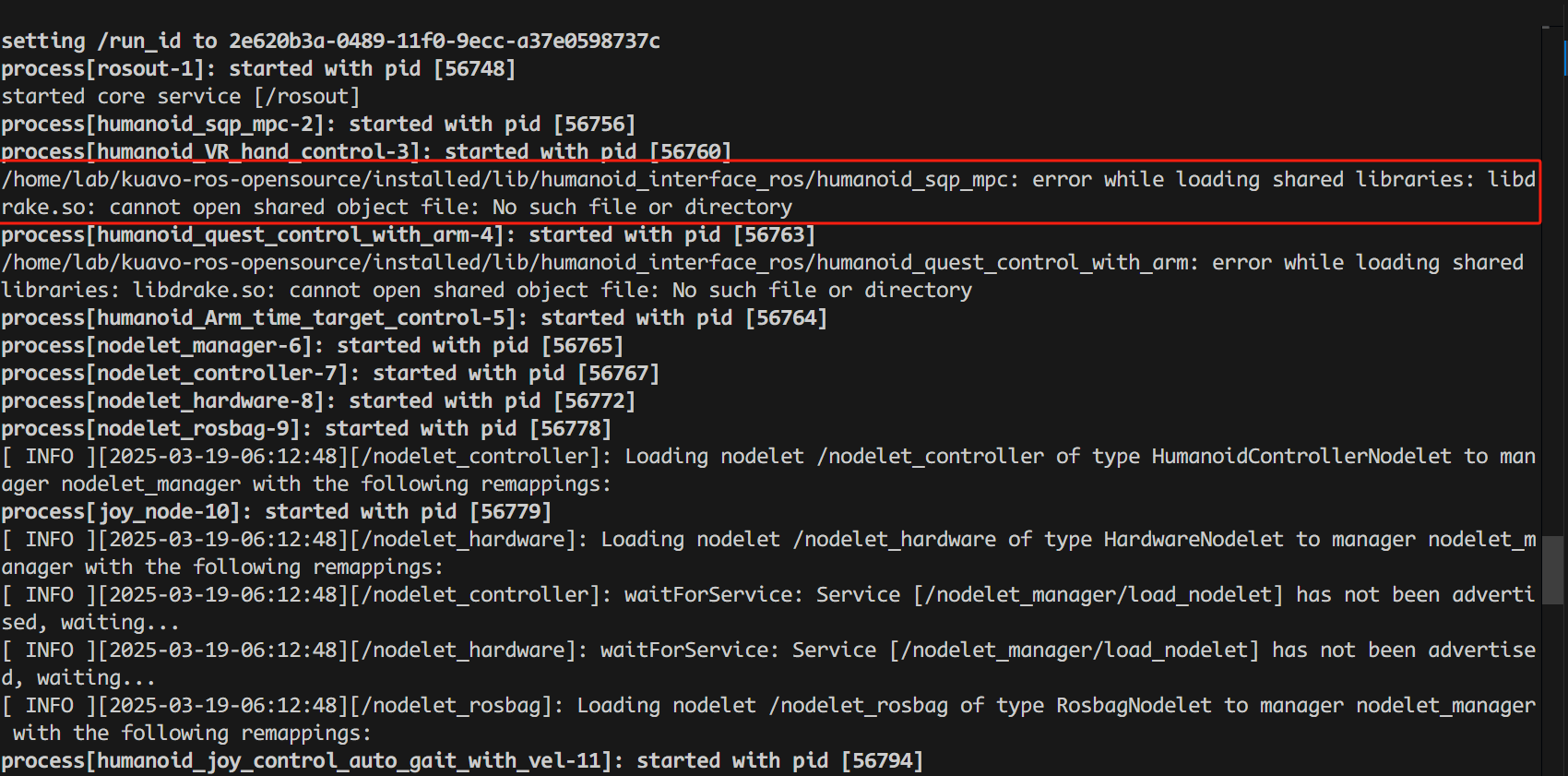
执行echo 'export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/drake/lib' >> ~/.zshrc && source ~/.zshrc(如果是bash环境就修改bashrc)
- catkin build humanoid_humanollers报关于gazebo_sim相关的错:
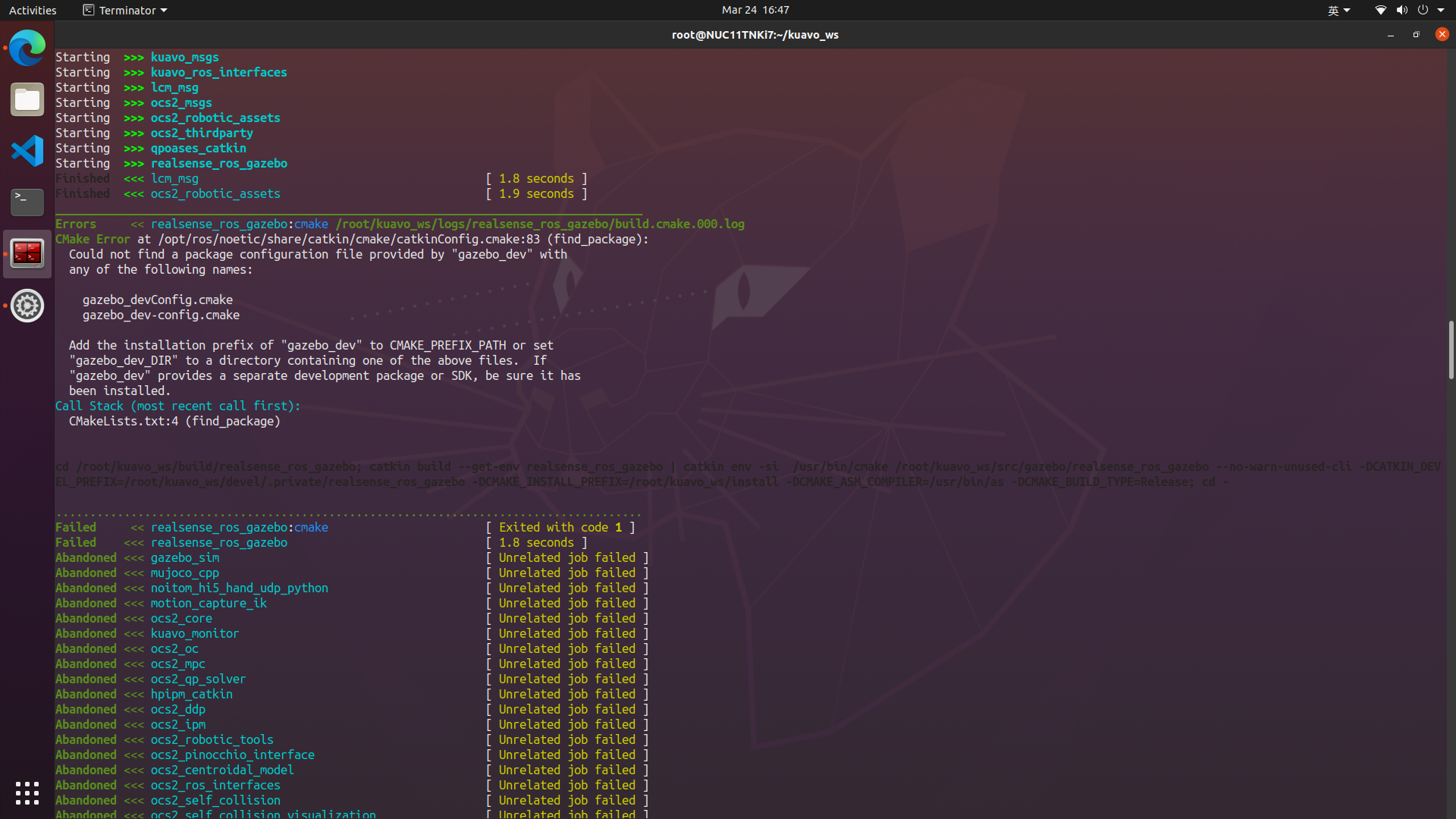
sudo apt-get update
sudo apt-get install ros-noetic-gazebo-dev
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
catkin build realsense_ros_gazebo
catkin build humanoid_controllers
- catking config工作空间不对
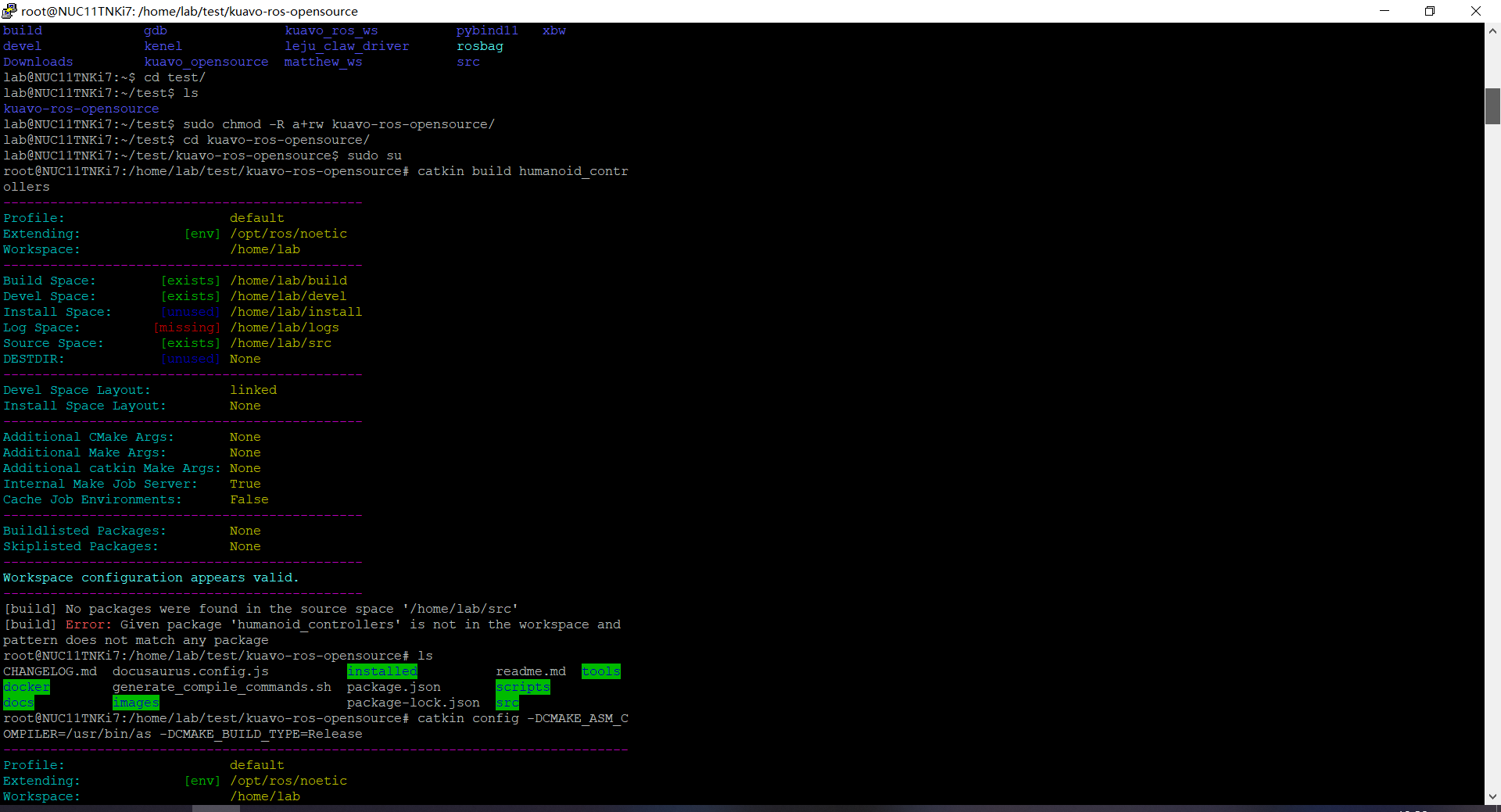
/home/lab/.catkin_tools改成.catkin_tools.bak
- 编译时出现humanoid_interface依赖报错
#运行下面命令
source installed/setup.zsh
catkin build humanoid_controllers
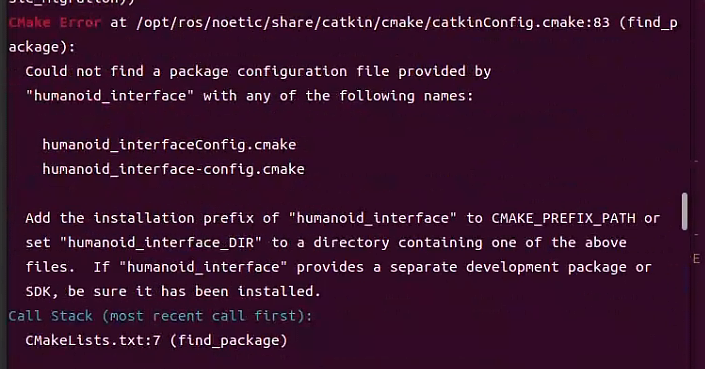
- 桌面软件工具无法连接机器人时,可以先尝试关掉电脑防火墙

情况是如上图,按照文档操作后,长时间加载,不能连接到机器人。
二、上位机
- load_robot_head.launch报错:

拉取master分支最新的commit
#确保目前处于master分支
git fetch
git pull
source /opt/ros/noetic/setup.bash
catkin build apriltag_ros
catkin build
- 上位机为AGX时,编译kuavo-ros-application代码仓库关于vision_msgs的报错:
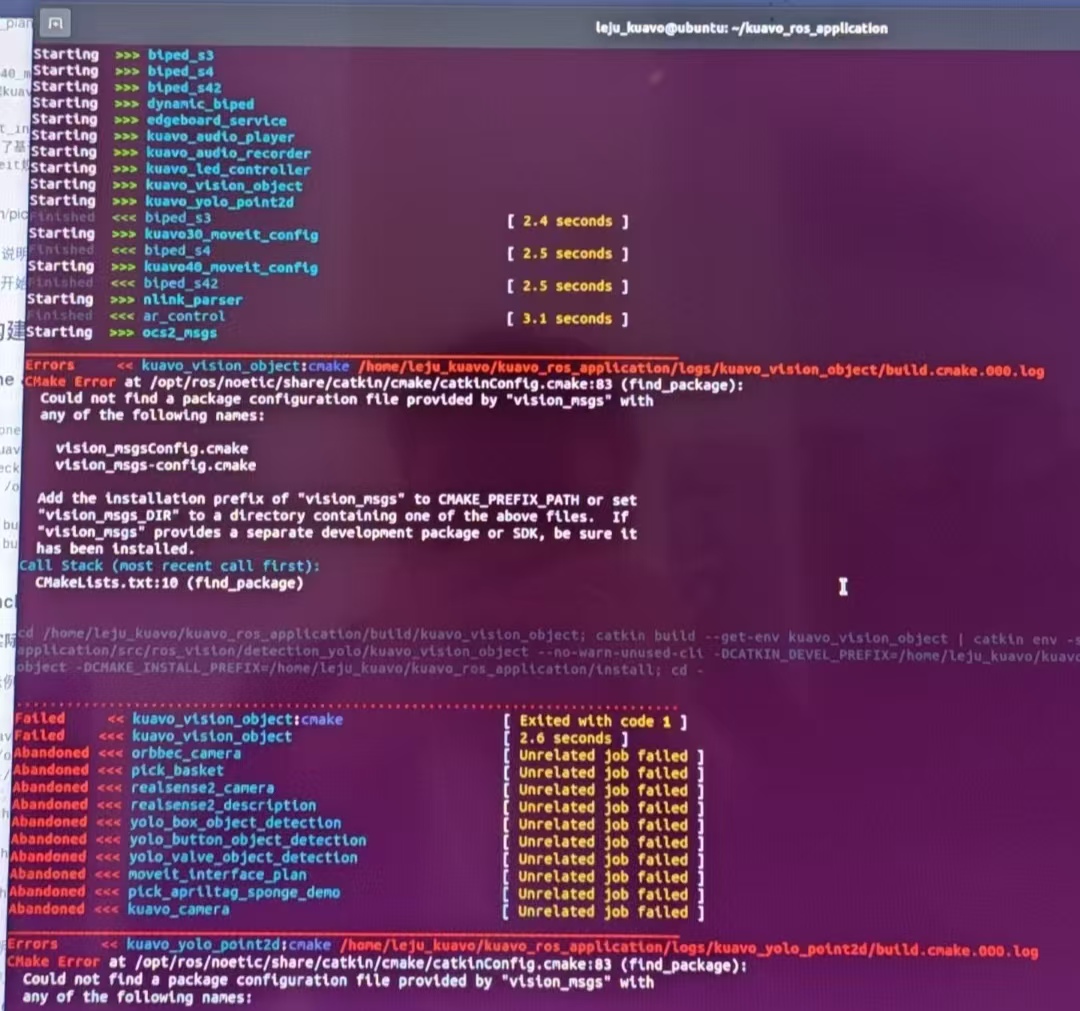
sudo apt install ros-noetic-vision-msgs
catkin build apriltag_ros
catkin build
- 上位机打开rviz,无雷达数据:
- 终端输入
ifconfig, 检查是否连接了192.168.1.xx网段的wifi
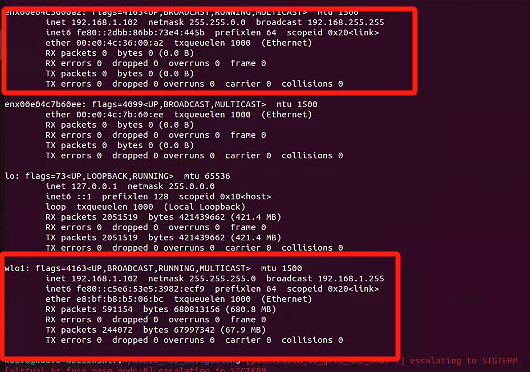
- 如果有, 需要断开.1网段的wifi, 连接其他非.1网段的wifi
三、下位机
- 仿真环境启动中机器人前倾摔倒的故障排查
问题描述: 在运行 MuJoCo / Isaac / Gazebo 仿真器时,机器人可能出现前倾摔倒的现象。此问题可能与 CPU 线程数有关。
解决步骤:
检查系统的 CPU 线程数: 终端中输入
lscpu如果输出中的 CPU(S) 数值小于 18,表示系统的 CPU 线程数不足,可能导致仿真器运行时分配给仿真任务的计算资源不足,进而影响机器人控制的稳定性,导致机器人摔倒。修改对应仿真器源码: 例如
/home/lab/kuavo-ros-opensourcesrc/humanoid-control/humanoid_controllers/launch/load_kuavo_mujoco_sim.launch文件: 在文件中搜索18,找到以下配置项:launch-prefix="taskset -c 12"删除掉图片中框起来的部分即可。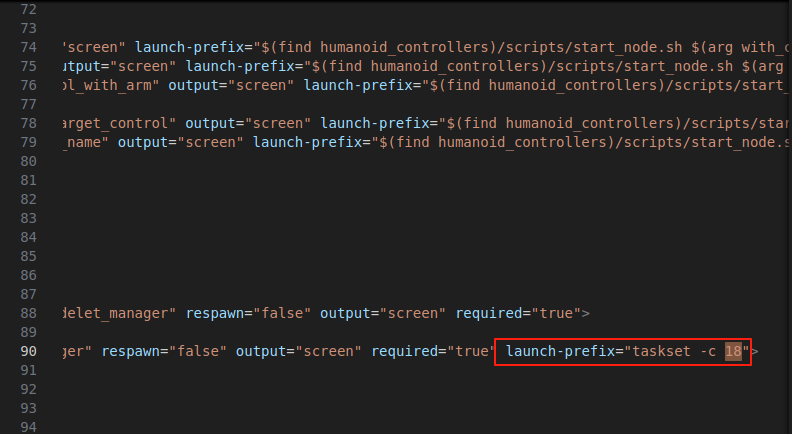
轮臂
一、软件
- 使用roslaunch humanoid_controllers load_kuavo_real.launch joystick_type:=h12启动机器人,手臂抖动伴随异响:
解决方式:将/kuavo-ros-opensource/src/humanoid-control/humanoid_controllers/config/kuavo_v45/mpc/下的文件task.info,
将 参数值改成1,重启机器人,再次进行编译后用
参数值改成1,重启机器人,再次进行编译后用
roslaunch humanoid_controllers load_kuavo_real.launch only_half_up_body:=true joystick_type:=h12
命令启动,手臂抖动问题消失,无其他报错,能够调用手臂轨迹规划案例。