KUAVO 软件出厂文档

概述
文档用于描述 KUAVO 出厂时软件部分需要完成的工作。
型号支持
| 型号 | 支持情况 |
|---|---|
| KUAVO 4.0 | 支持 |
| KUAVO 4.2 pro | 支持 |
硬件检查清单
- NUC 镜像烧录完成
- 电机安装完成
- 末端执行器安装完成
- IMU 传感器安装完成
- H12PRO 遥控器对频完成(可选)
- QUEST 3 设备已经安装了 KUAVO_HAND_TRACK APP
详细操作步骤
IMU 配置
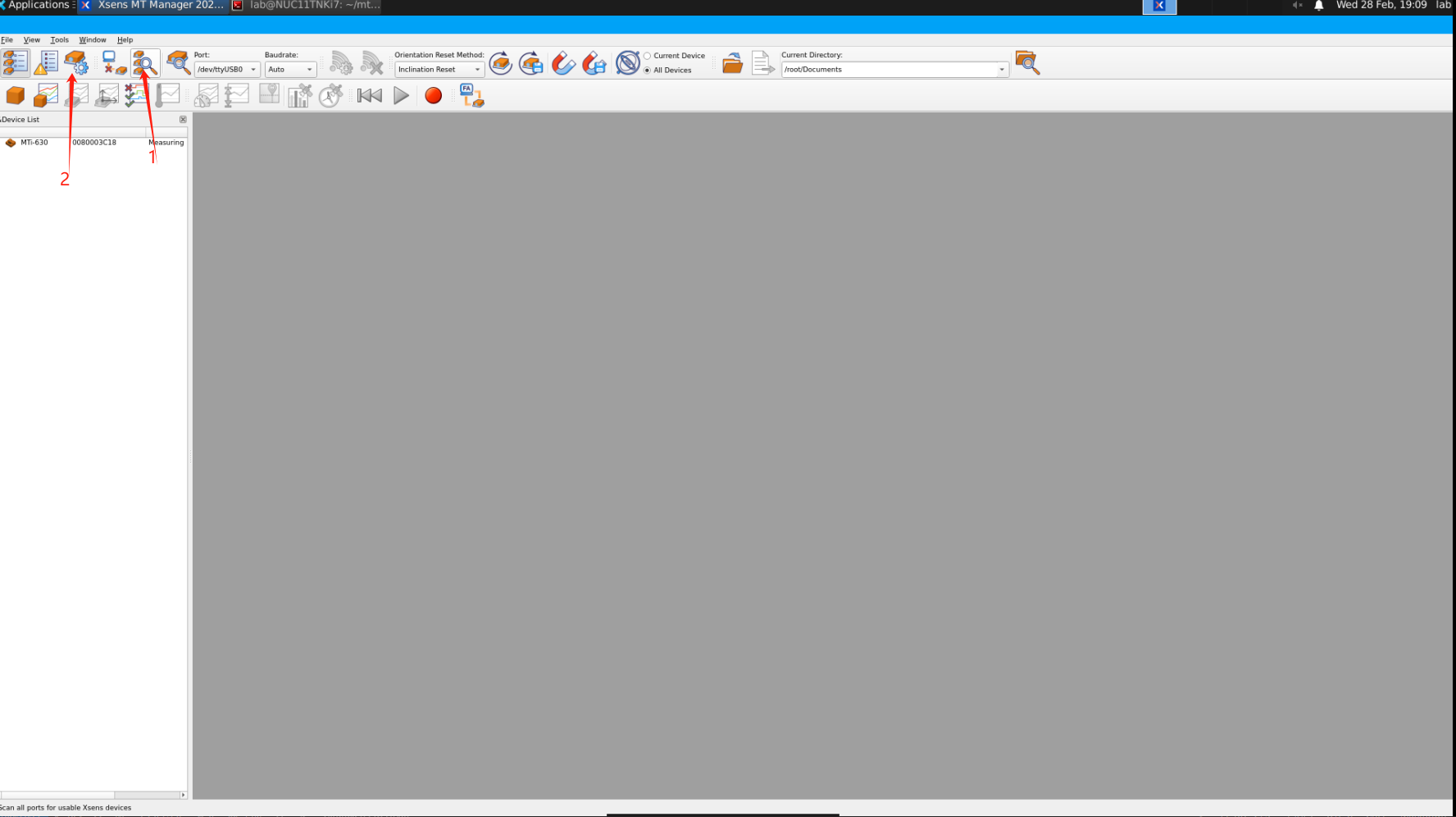
- 使用显示器连接 NUC 后,打开 MT manager 配置 IMU 传感器
cd ~/mtmanager/linux-x64/bin
sudo ./mtmanager
- 扫描 IMU 设备,如下图
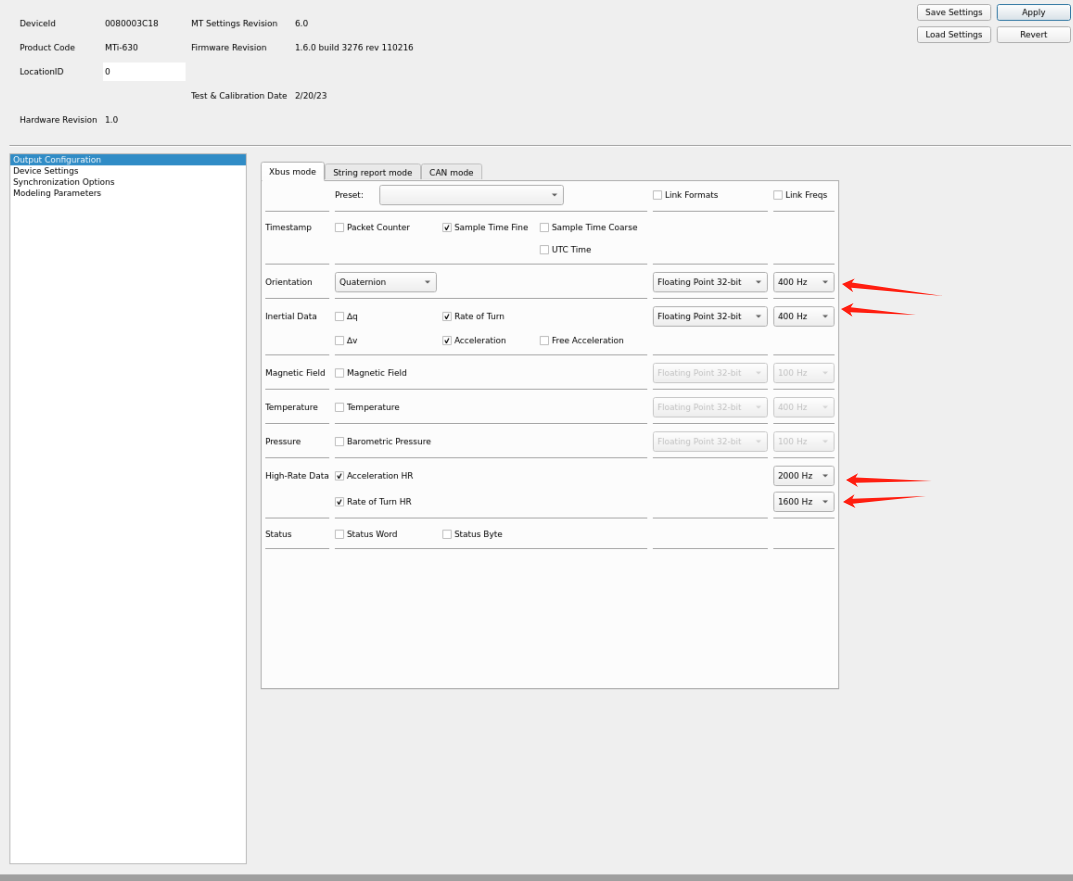
- 配置 IMU,加速度为2000Hz,角速度为1600Hz,四元数为400Hz,如下图
- 配置波特率为2M,如下图
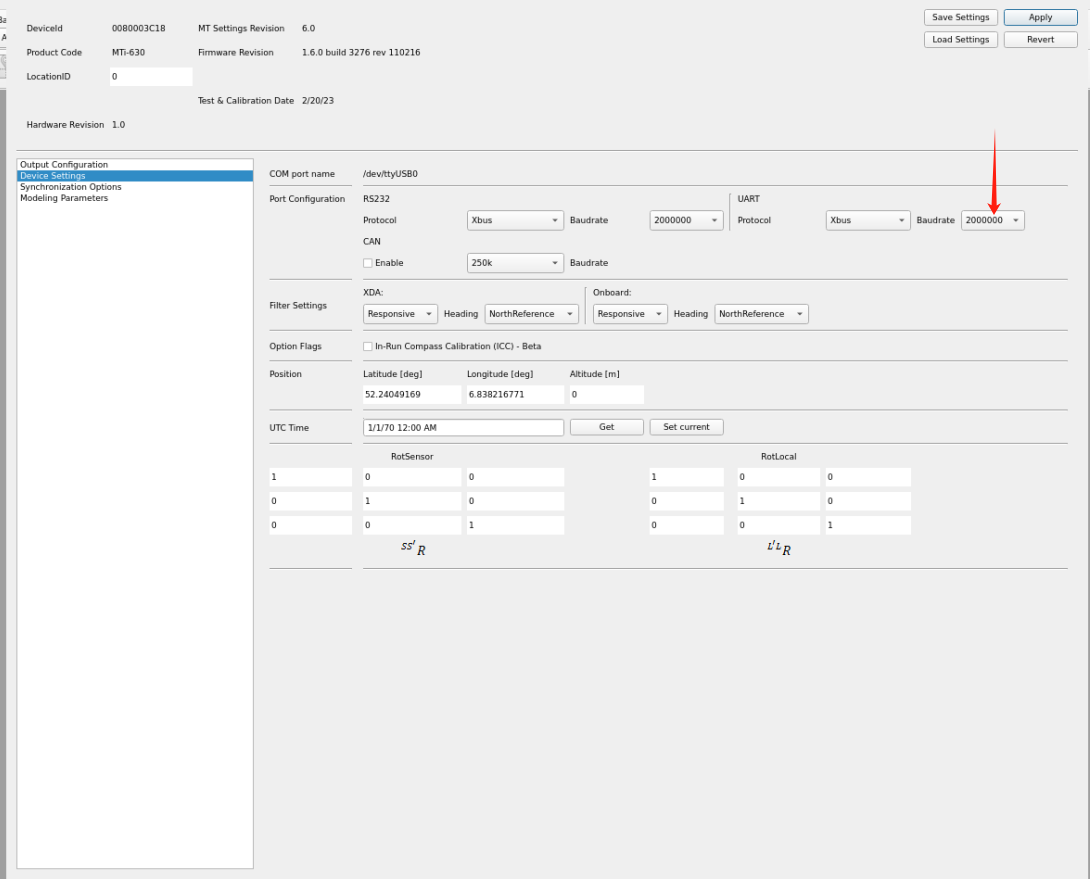
- 点击
Apply
配置PIP CONFIG
新建终端
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip config set global.trusted-host pypi.tuna.tsinghua.edu.cn
pip config set install.trusted-host pypi.tuna.tsinghua.edu.cn
机器人程序准备
- 拉取代码 新建终端
cd ~
git clone --depth=1 https://gitee.com/leju-robot/kuavo-ros-opensource.git --branch dev
cd kuavo-ros-opensource
git reset --hard 5698976c89af62e884eac8ad76ad6d38473a2060 #切到指定提交 2024-11-29
新建终端
cd ~
sudo rm -rf kuavo_opensource && git clone https://gitee.com/leju-robot/kuavo_opensource.git --branch master --depth=1
- 确认机器人版本号
新建终端
例如机器人版本号为 4.2pro
echo 'export ROBOT_VERSION=42' >> ~/.bashrc # 设置机器人版本号
sudo su
echo 'export ROBOT_VERSION=42' >> ~/.bashrc # 设置机器人版本号到root用户
- 设置机器人重量(如果机器人重量有修改,需要重新执行一次)
新建终端,分别两次复制执行
rm -rf ~/.config/lejuconfig/TotalMassV${ROBOT_VERSION} # 删除旧的重量文件
read -p "请输入机器人重量(kg): " robot_mass # 询问用户输入重量
echo $robot_mass > ~/.config/lejuconfig/TotalMassV${ROBOT_VERSION} # 设置新的重量
echo "已将机器人重量设置为 ${robot_mass}kg"
- 设置机器人驱动板类型
- 使用 VSCODE 连接机器人
- 打开文件
~/.config/lejuconfig/EcMasterType.ini(如果文件不存在,则新建) - 如果类型为
elmo,则设置为elmo,如果类型为优达,则设置为youda
- 编译 新建终端
cd ~/kuavo-ros-opensource
sudo su
catkin config -DCMAKE_ASM_COMPILER=/usr/bin/as -DCMAKE_BUILD_TYPE=Release
source installed/setup.bash
catkin build humanoid_controllers
配置手臂电机配置文件
修改 ~/.config/lejuconfig/config.yaml 文件中的 negtive_address 参数,如下所示
negtive_address:
- [0x0D, 0x02, 0x04, 0x08, 0x0A, 0x0B, 0x09]
配置灵巧手
新建终端
cd ~/kuavo_opensource/tools/check_tool
python3 Hardware_tool.py
输入 b 加回车 配置灵巧手 usb udev 规则
输入 c 加回车 测试灵巧手(如果没反应,需要重启 NUC 使得 udev 规则生效)
电机运动方向确认
⚠️ 所有电机运动均符合右手定则(右手握住参考物体,大拇指指向参考轴正方向,四指弯曲的方向表示旋转或环绕方向。)
0秒开始时腿部电机正向运动示意
31秒开始手臂电机正向运动示意
58秒开始头部电机正向运动示意
检测手臂电机运动方向
新建终端
cd ~/kuavo_opensource/tools/check_tool
python3 Hardware_tool.py
输入 e 加回车,瑞沃电机辨识方向
然后输入 1 到 14 选择手臂电机,观察电机运动方向是否符合kuaov_关节正方向运动, 如果符合,则输入 no 加回车, 如果不符合,则输入 yes 加回车
零点校准
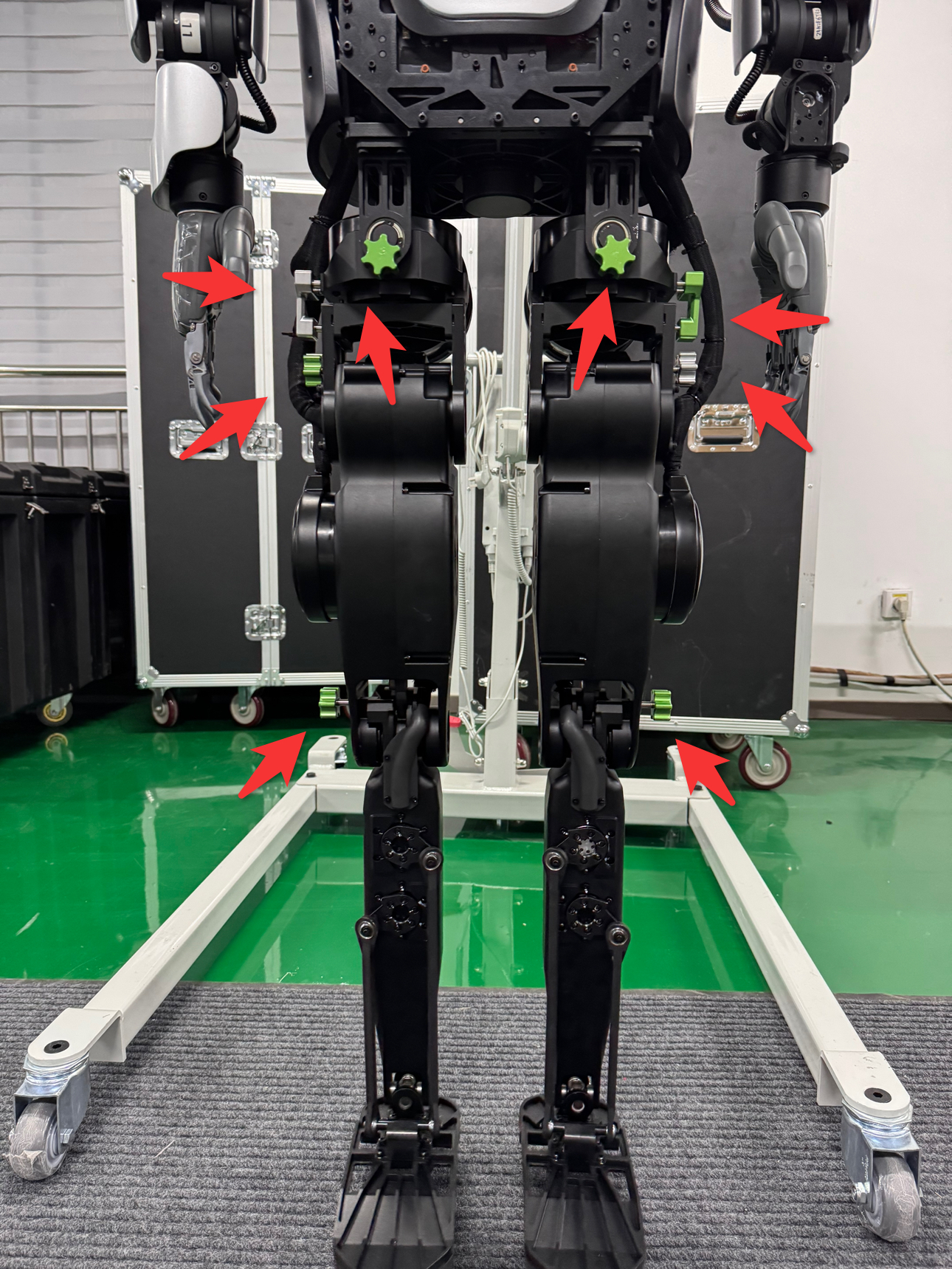
- 请将工装插入机器人腿部, 如下图所示

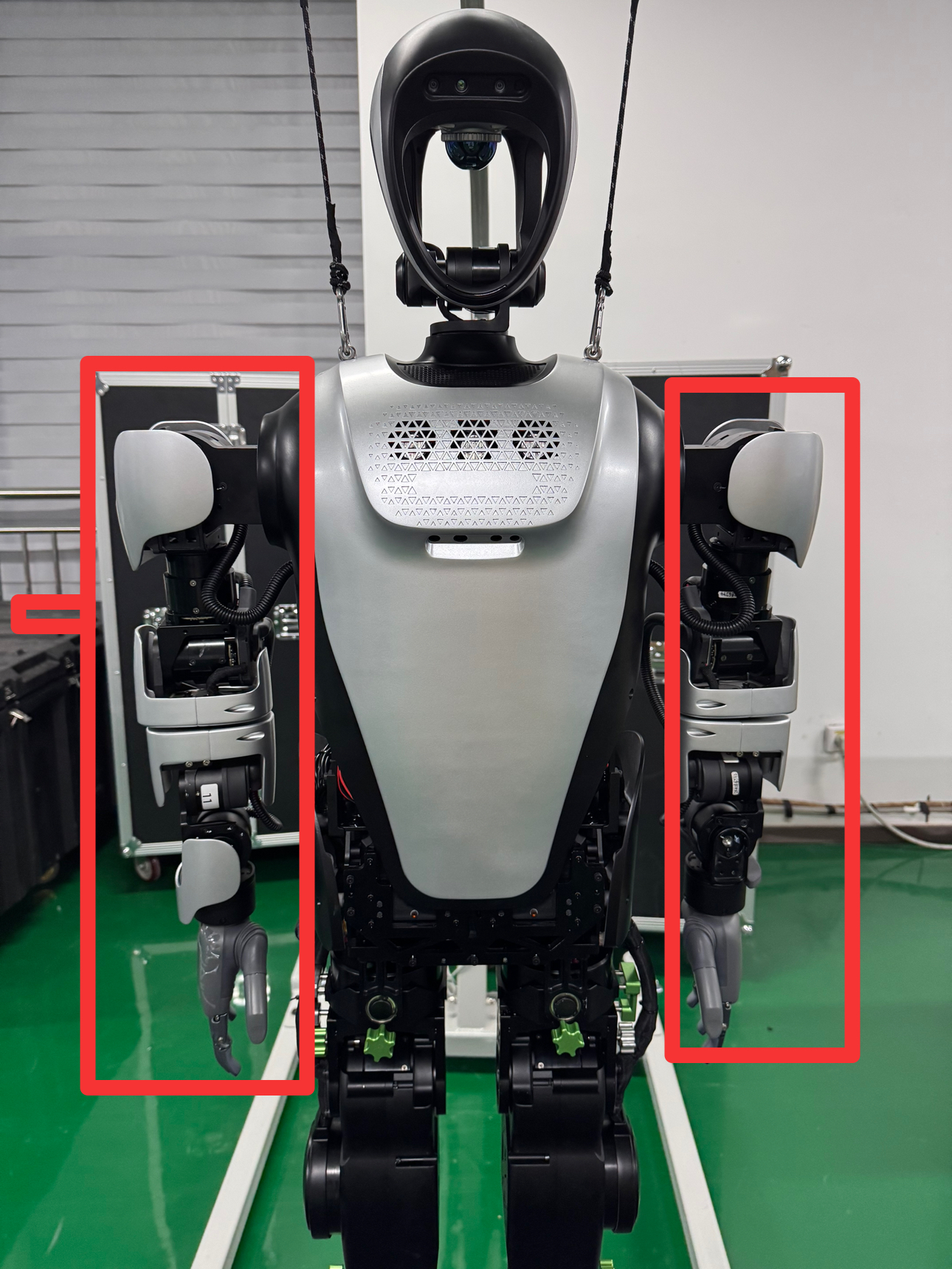
- 请将机器人手臂摆好,如下图所示
- 启动机器人校准程序 新建终端
cd ~/kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true cali_leg:=true cali_arm:=true
如果只需要校准手臂,则使用以下命令 新建终端
cd ~/kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true cali_arm:=true
- 在使能完腿部电机后(打印出如下图的位置之后), 零点校准之前电机运动可能会超出限位(如果没超出限位, 则按
c加回车,保存腿部当前位置作为零点)
0000003041: Slave 1 actual position 9.6946716,Encoder 63535.0000000
0000003051: Rated current 39.6000000
0000003061: Slave 2 actual position 3.9207458,Encoder 14275.0000000
0000003071: Rated current 11.7900000
0000003081: Slave 3 actual position 12.5216674,Encoder 45590.0000000
0000003091: Rated current 42.4300000
0000003101: Slave 4 actual position -37.2605896,Encoder -244191.0000000
0000003111: Rated current 42.4300000
0000003121: Slave 5 actual position 15.8138275,Encoder 207275.0000000
0000003131: Rated current 8.4900000
0000003142: Slave 6 actual position -2.7354431,Encoder -35854.0000000
0000003151: Rated current 8.4900000
0000003161: Slave 7 actual position 5.8642578,Encoder 38432.0000000
0000003171: Rated current 39.6000000
0000003183: Slave 8 actual position -16.8491821,Encoder -61346.0000000
0000003192: Rated current 11.7900000
0000003201: Slave 9 actual position -18.9975585,Encoder -69168.0000000
0000003211: Rated current 42.4300000
0000003221: Slave 10 actual position -64.5283508,Encoder -422893.0000000
0000003231: Rated current 42.4300000
0000003241: Slave 11 actual position -31.0607147,Encoder -407119.0000000
0000003251: Rated current 8.4900000
0000003261: Slave 12 actual position 49.7427368,Encoder 651988.0000000
0000003272: Rated current 8.4900000
0000003281: Slave 13 actual position 26.8544311,Encoder 97774.0000000
0000003291: Rated current 14.9900000
0000003301: Slave 14 actual position -19.9171142,Encoder -72516.0000000
0000003311: Rated current 14.9900000
- 将所有的
Slave xx actual position后的数字值记录到~/.config/lejuconfig/offset.csv文件中
⚠️ 注意:
- 如果机器人行走偏左,增大
offset.csv文件中 1 号的值,每次修改幅度为0.5 - 如果机器人行走偏右,减少
offset.csv文件中 7 号的值,每次修改幅度为0.5 - 如果机器人行走重心很低,请重新确认机器人质量后,重新执行设置机器人质量步骤
行走测试
- 启动机器人程序 新建终端
cd ~/kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch

步态切换(字母键) | 按键 | 功能 | | ---- | ---- | | A | 站立模式 (STANCE) | | Y | 行走模式 (WALK) |
运动控制(摇杆)
- 左摇杆:控制移动方向
- 上下:前进/后退
- 左右:平移
- 右摇杆:
- 左右:原地转向
- 上下:调整机器人高度
功能按键
- START:从悬挂状态切换到站立状态
- BACK:安全退出程序
H12PRO 遥控器程序准备(如果需要)
请确认 H12PRO 遥控器已经对频完成
- 安装 H12PRO 遥控器程序
新建终端
cd ~/kuavo-ros-opensource/src/humanoid-control/h12pro_controller_node/scripts
sudo su
./deploy_autostart.sh
执行中最后会提示三个问题, 分别是:
- 是否开启开机自启动 h12pro 遥控器控制机器人程序
- 是否开启 h12pro 遥控器控制机器人程序
- 是否重启机器人 NUC 使得配置生效
根据需求选择 y 或 n。
- 检查遥控器数据
新建终端
cd ~/kuavo-ros-opensource
source devel/setup.bash
rostopic echo /h12pro_channel
拨动摇杆或者按下按键,查看数据有变化
⚠️ 此步需要启动 h12pro 遥控器控制机器人程序
- 开关 H12PRO 遥控器
开启服务:
sudo systemctl start ocs2_h12pro_monitor.service
关闭服务:
sudo systemctl stop ocs2_h12pro_monitor.service
开机自启动:
sudo systemctl enable ocs2_h12pro_monitor.service
关闭开机自启动:
sudo systemctl disable ocs2_h12pro_monitor.service
查看服务日志:
sudo journalctl -u ocs2_h12pro_monitor.service -f
- 测试 H12PRO 遥控器
基本使用:
| 操作 | 按键说明 |
|---|---|
| 开机 | E左 + F右 + C |
| 校准(校准完只能结束) | E左 + F右 + D |
缩腿到站立:
| 操作 | 按键说明 |
|---|---|
| 缩腿到站立 | E左 + F右 + C |
站立阶段:
| 操作 | 按键说明 |
|---|---|
| 原地踏步 | E中 + F中 + A |
| 回到站立 | E左 + F右 + D |
左摇杆:
| 操作 | 按键说明 |
|---|---|
| 垂直方向 | X轴移动 |
| 水平方向 | Y轴移动 |
右摇杆:
| 操作 | 按键说明 |
|---|---|
| 垂直方向 | 躯干高度控制 |
| 水平方向 | 旋转控制 |
结束程序:长按 C + D(假如在站立状态下触发停止,机器人会先下蹲再停止)
北通手柄按键映射修改方式
鲲鹏20 M1 和 M2 的默认映射为 A 和 B,需要对映射进行修改。
新按键映射:M1->LS M2->RS
北通游戏厅官网: https://www.betop-cn.com/support
进入北通游戏厅----外设助手----按键----拓展按键----选择拓展按键,进行按键映射修改。

VR 遥操作测试
请确保 QUEST 3 设备与机器人在同一个局域网下,并且已经安装了 KUAVO_HAND_TRACK APP
- 安装依赖(只需执行一次) 新建终端
cd ~/kuavo-ros-opensource
pip3 install -r src/manipulation_nodes/noitom_hi5_hand_udp_python/requirements.txt
sudo su
pip3 install -r src/manipulation_nodes/noitom_hi5_hand_udp_python/requirements.txt
- 启动程序
新建终端
cd ~/kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_with_vr.launch
⚠️ 启动注意事项:
- 等待机器人腿部缩起
- 将机器人放至离地 2cm 处
- 需一人扶住机器人背部
- 等待 10 秒让程序完全启动
打开 QUEST 3 中的 KUAVO_HAND_TRACK 应用
用户位置标定:
- 站立,双手握住手柄,放在双腿两侧(模仿机器人站立姿态)
- 长按右手柄 meta 按钮,等待圆圈转完
机器人站立
- 如果机器人双腿已经缩起
- 按下右手柄 A 键,进入站立状态(需用力扶住机器人背部)
控制方式
基础控制:
- 右手柄 A 键:站立状态
- 右手柄 B 键:返回行走状态(原地踏步)
- 机器人头部:自动跟随您的头部运动
- 扳机控制手指开合,Y键用于锁定或解锁手指控制
移动控制:
- 左摇杆:前后移动、左右平移
- 右摇杆:调整高度、左右转向
手臂控制:
- 长按双手柄扳机:进入手臂外部控制
- 移动手柄即可控制机器人手臂运动
- 左 X + 右 A:切换自动摆手/手臂外部控制
- 左 X + 右 B:保持当前姿态
结束控制:
- 同时按下双手柄 XY 键(建议先使用右手柄降低机器人高度后结束)
导出机器人 LOG
- 导出终端日志
- 使用 VSCODE 连接机器人
- 连接后打开文件夹
~/.ros/stdout, 如下图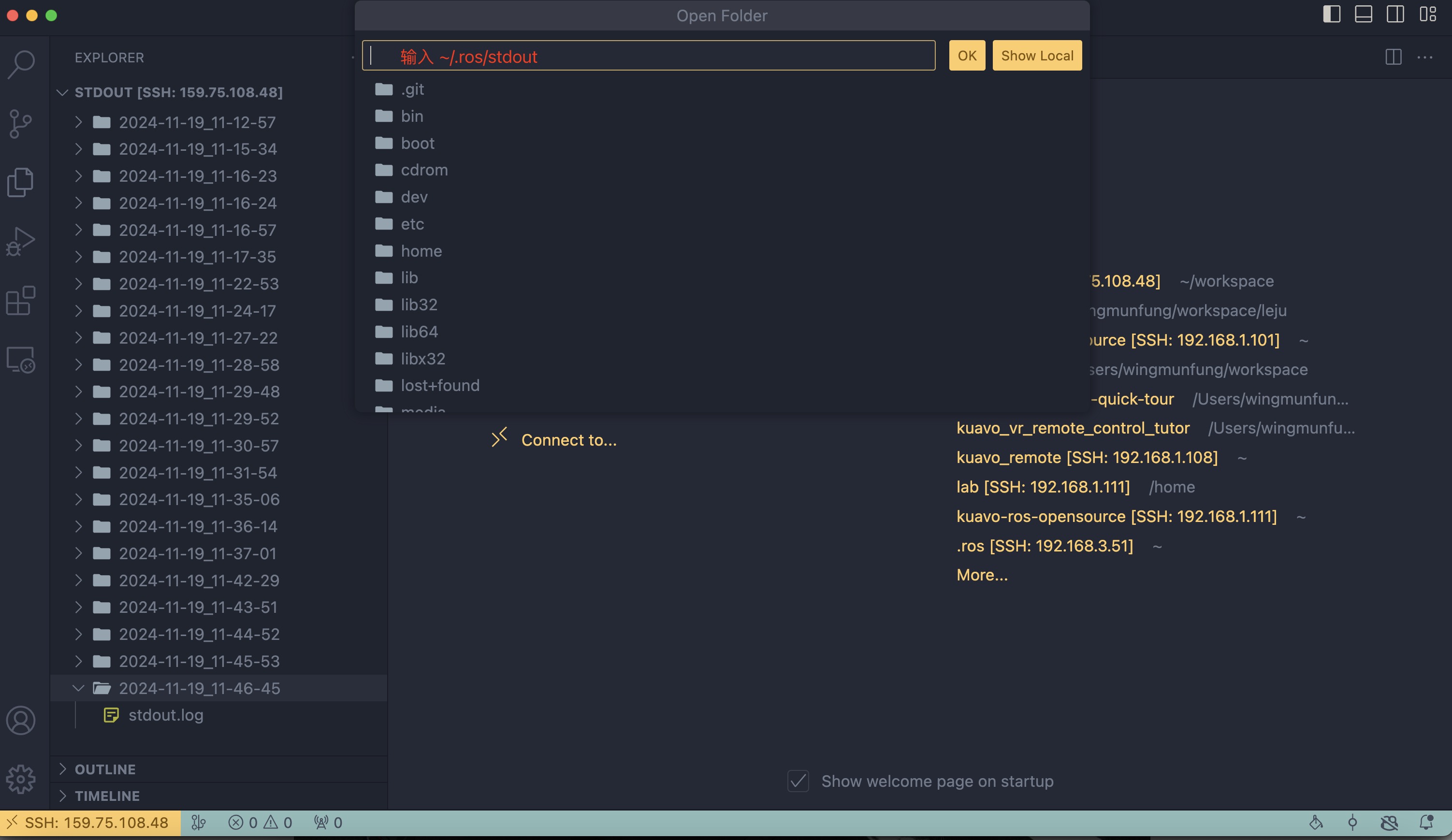
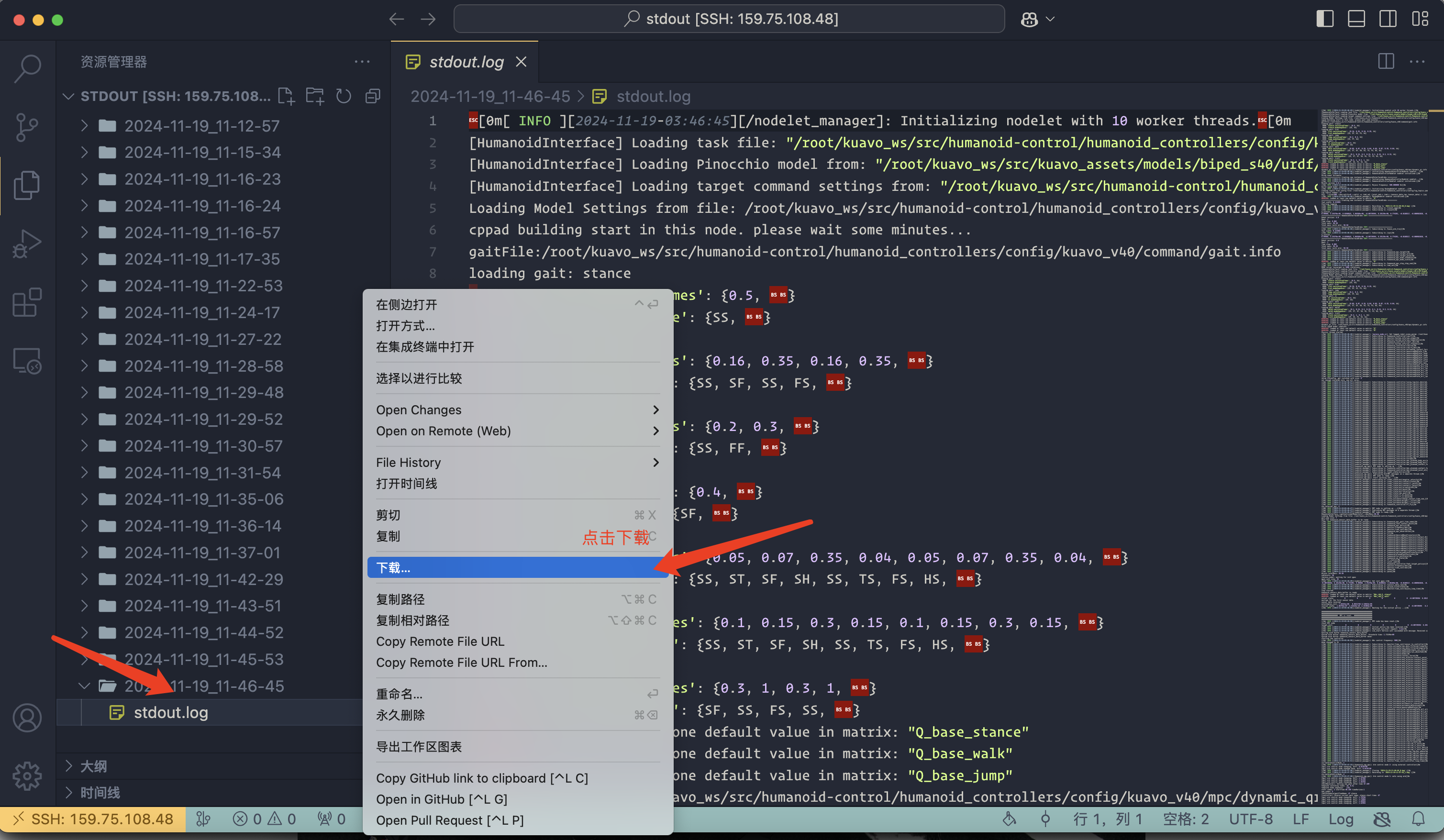
- 选择对应的日期目录,下载日志,如下图
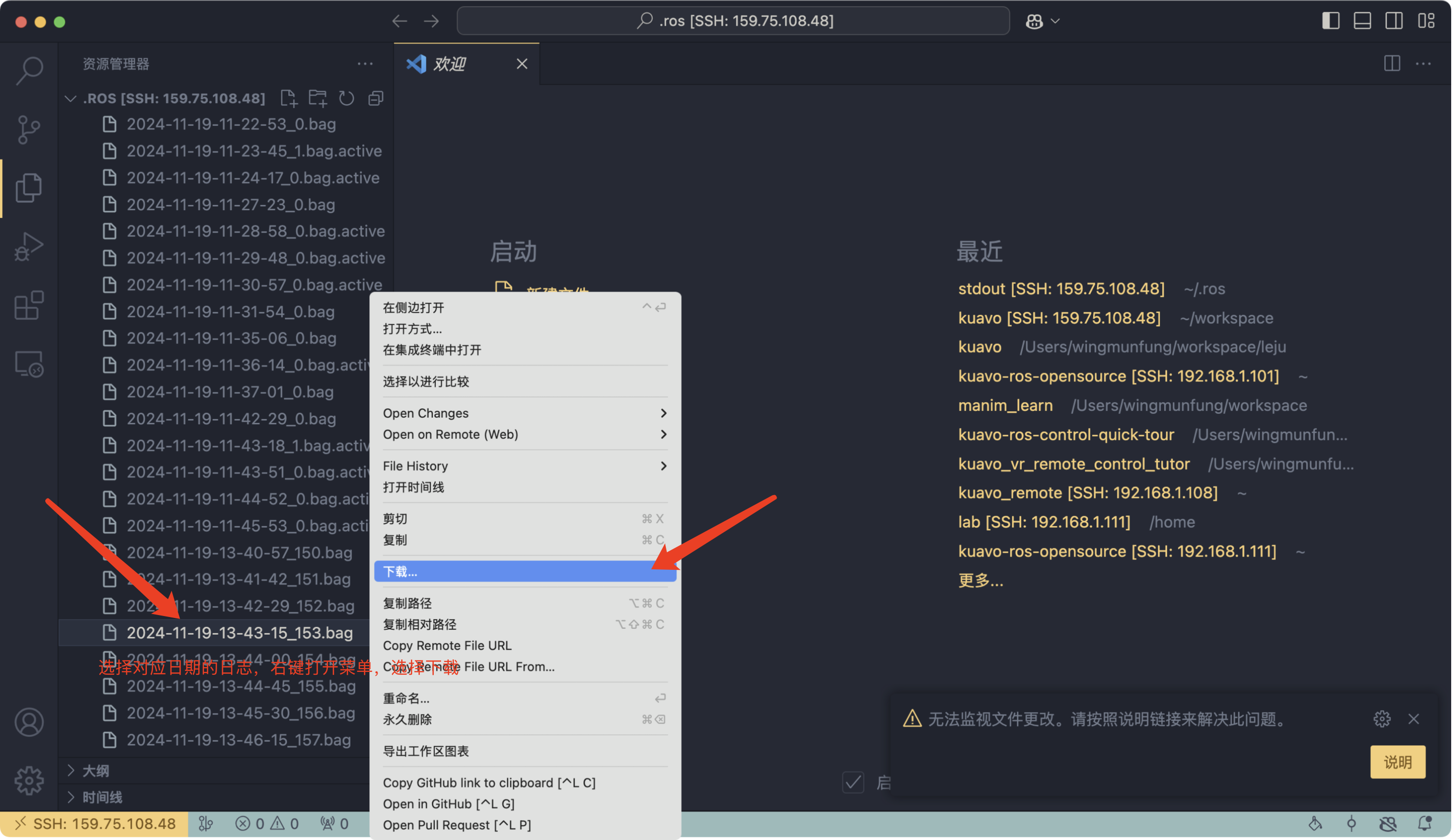
- 导出 ROSBAG 日志
- 使用 VSCODE 连接机器人
- 连接后打开文件夹
~/.ros, 如下图
- 选择对应的日期 ROSBAG 文件,下载日志(文件结尾以
.bag或者.bag.active结尾),如下图