箱体搬运行为树模块 (grab_box)
1. 功能简介
通过AprilTag标签识别或视觉识别模型,得到目标的位姿。然后采用基于行为树(Behavior Tree)的方法,将寻找目标、移动、抓取、放置等行为节点通过逻辑连接,完成箱体搬运任务流程。
2. 环境与依赖
2.1. 软件依赖
- BehaviorTree.CPP (v3): 本模块依赖
BehaviorTree.CPP框架。如果环境中未安装,可通过以下命令安装:sudo apt install ros-noetic-behaviortree-cpp-v3 - Groot2: 推荐使用
Groot2对行为树进行可视化编辑和监控。 - 其他环境配置和本代码库 (
kuavo_ros_control) 所需一致。
2.2. 硬件与配置 (实物)
- AprilTag标签: 默认使用AprilTag进行目标定位,请确保标签已正确摆放。
- AprilTag配置: AprilTag标签的ID和尺寸在上位机
kuavo_ros_application代码库的src/ros_vision/detection_apriltag/apriltag_ros/config/tags.yaml文件中配置。请确保该配置与实际使用的标签一致。
3. 编译
在catkin工作空间下,执行以下命令编译本功能包以及相关依赖:
catkin build humanoid_controllers grab_box
4. 使用说明
本模块支持在仿真和实物机器人上运行。
4.1. 仿真
4.1.1. 启动流程
启动 Launch 文件
- 在终端中
source工作空间:source devel/setup.zsh
# 或 source devel/setup.bash - 运行基础仿真启动指令:
roslaunch grab_box grab_box_sim.launch - 如需使用北通手柄控制,请根据手柄型号选择以下指令:
# 北通2
roslaunch grab_box grab_box_sim.launch joystick_type:=bt2
# 北通2 Pro
roslaunch grab_box grab_box_sim.launch joystick_type:=bt2pro
- 在终端中
控制行为树 行为树的启动和停止可以通过命令行或手柄进行控制。
* **命令行控制**:
- 开启新终端并 `source` 工作空间。
- **开始执行**: `sh scripts/start_bt_tree.sh`
- **停止执行**: `sh scripts/stop_bt_tree.sh`
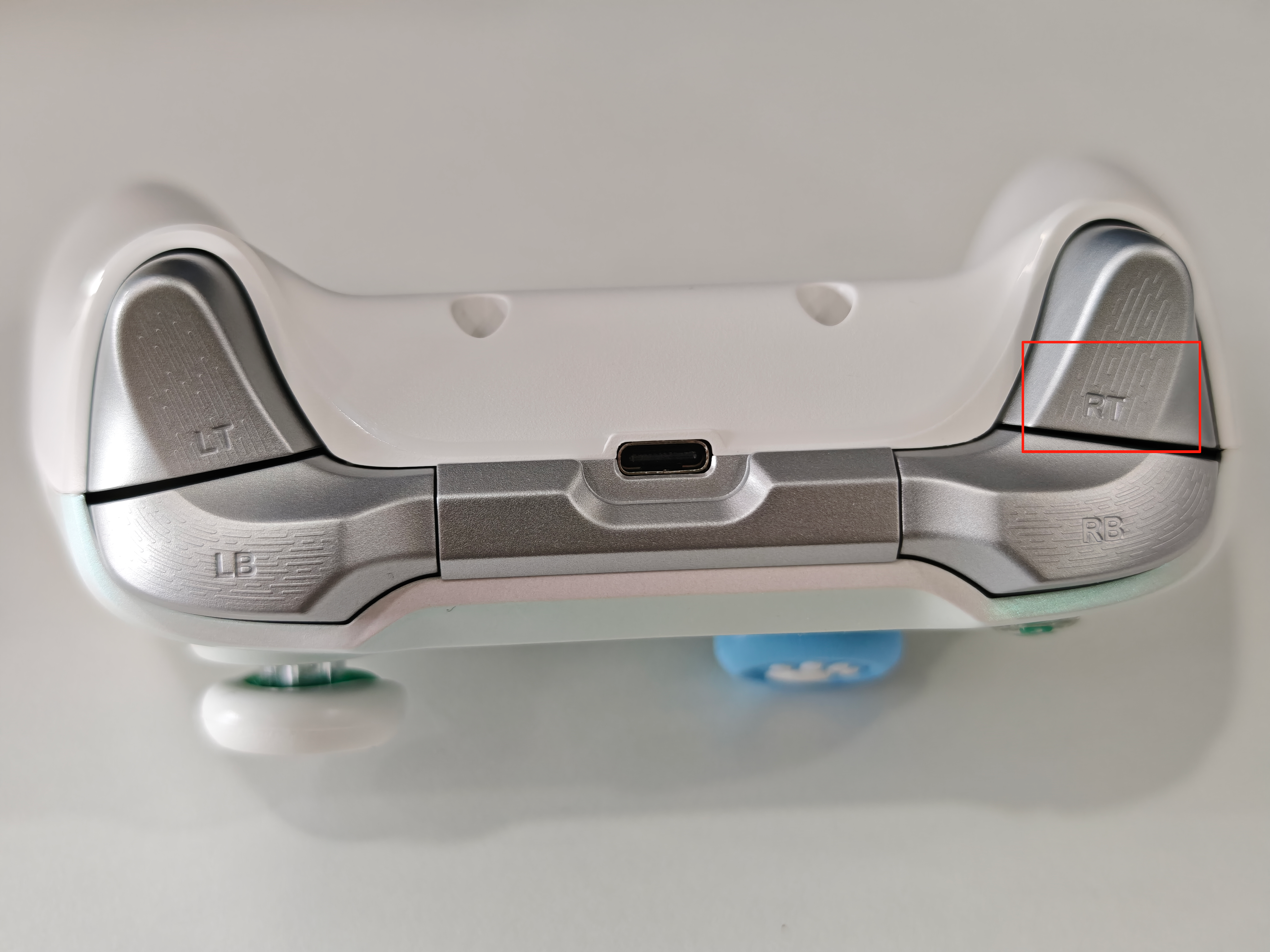
* **北通手柄控制**:
- **开始执行**: `RT + A`
- **停止执行**: 需要两步操作!
1. `RT + B`: 停止行为树运行。
2. `RT + X`: 停止手臂运动控制器。
4.2. 实物机器人
4.2.1. 准备工作
- ROS主从机配置: 确保上下位机的ROS网络配置正确,可以互相通信。
- 机器人零点标定: 全身关节的零点需标定完成。
- 腿部零点可通过零点工装完成标定。
- 头部和手臂的零点可通过视觉标定程序完成,具体请参考视觉标定文档。
- 代码分支与编译:
- 下位机 (
kuavo_ros_control): 推荐使用dev分支,并执行过catkin build。 - 上位机 (
kuavo_ros_application): 推荐使用dev分支,并按照其README说明完成编译。
- 下位机 (
4.2.2. 启动与控制
[IMPORTANT] 启动时请务必遵循以下顺序:先启动下位机程序,再启动上位机程序。
下位机
在
kuavo_ros_control工作空间下,运行启动命令:# 基础启动
roslaunch grab_box grab_box_real.launch
# 如需使用北通手柄,请根据型号选用:
# 北通2
roslaunch grab_box grab_box_real.launch joystick_type:=bt2
# 北通2 Pro
roslaunch grab_box grab_box_real.launch joystick_type:=bt2pro
上位机
- 在
kuavo_ros_application的工作空间下,运行启动命令:roslaunch dynamic_biped sensor_apriltag_only_enable.launch
- 在
控制行为树 控制方式与仿真环境一致,可通过命令行或手柄操作。
命令行控制:
- 开启新终端并
source工作空间。 - 开始执行:
sh scripts/start_bt_tree.sh - 停止执行:
sh scripts/stop_bt_tree.sh
- 开启新终端并
北通手柄控制:
- 开始执行:
RT + A - 停止执行: 需要两步操作!
RT + B: 停止行为树运行。RT + X: 停止手臂运动控制器。
- 开始执行:
5. 行为树 (Behavior Tree)
5.1. 行为树文件
行为树的XML定义文件位于本功能包的 cfg/ 目录下。可以根据需求修改或创建新的行为树文件。
5.2. 可视化与修改
使用Groot2可以对箱体搬运的流程进行可视化和修改。
- 下载并安装
Groot2。 - 启动
Groot2,并打开需要查看或修改的XML文件。
更多关于Groot2的使用方法,请参考其官方网站:behaviortree.dev/groot/
5.3. 关键节点与参数
5.3.1. 参数配置文件 bt_config.yaml
该文件位于 ./cfg/ROBOT_VERSION/bt_config.yaml 中,ROBOT_VERSION 为使用的机器人型号对应的文件夹。文件中主要包含所使用的行为树文件路径、二维码识别的安全区域、以及关键节点的使用参数。
5.3.2. 自定义行为树节点
如需了解行为树节点的代码结构或开发自定义节点,请参考 BehaviorTree.CPP 的官方文档教程:BT.CPP Tutorials
6. 注意事项与技巧
- 机器人姿态调整: 如果发现机器人在站立或行走时有明显的前倾或后仰,可以通过微调腿部3号、9号电机的零点(例如,±1~3度)来进行补偿,以获得更稳定的运动效果。具体操作可参考此文档。