Demo - Tracing Path
描述
使用 MPC 控制器跟踪给定的固定轨迹示例,包括:
- 直线:从机器人当前的位置和朝向为起点,生成指定长度的轨迹
- 正方形:从机器人当前的位置和朝向为起点,逆时针生成指定长度的轨迹
- 圆形:从机器人当前的位置和朝向为起点,逆时针生成指定半径的轨迹
- “S” 曲线:从机器人当前的位置和朝向为起点,生成正弦曲线轨迹
目录结构
# tree -L 2 -d
.
├── CMakeLists.txt
├── docs # 文档/图片
├── include
│ └── trace_path # 头文件
├── launch
│ ├── follow_circle_traj.launch # 跟踪圆形轨迹-启动文件
│ ├── follow_s_curve_traj.launch # 跟踪S曲线轨迹-启动文件
│ └── follow_sqaure_traj.launch # 跟踪正方形轨迹-启动文件
├── package.xml
├── README.md
├── rviz
│ └── trace_path_demo.rviz
└── src
├── circle_path_generator.cpp # 圆形路径生成器
├── common # 公共方法
├── line_path_generator.cpp # 直线路径生成器
├── mpc_path_tracer.cpp # MPC 控制器
├── path_tracer.cpp # 路径跟踪器基类
├── pid_path_tracer.cpp
├── s_curve_path_generator.cpp # 正方形路径生成器
├── square_path_generator.cpp # S曲线路径生成器
└── tests # *_main.cc 入口
参数设置
路径参数
公共参数:
- speed: 速度,单位 m/s
- dt: 时间间隔,单位 s
即每隔
speed * dt距离在路径上生成一个点
直线
- length: 长度,单位 m
正方形
- side_length: 边长 ,单位 m
圆形
- radius: 半径,单位 m
S 曲线
- length: 总长度的一半,单位 m
- amplitude: 振幅
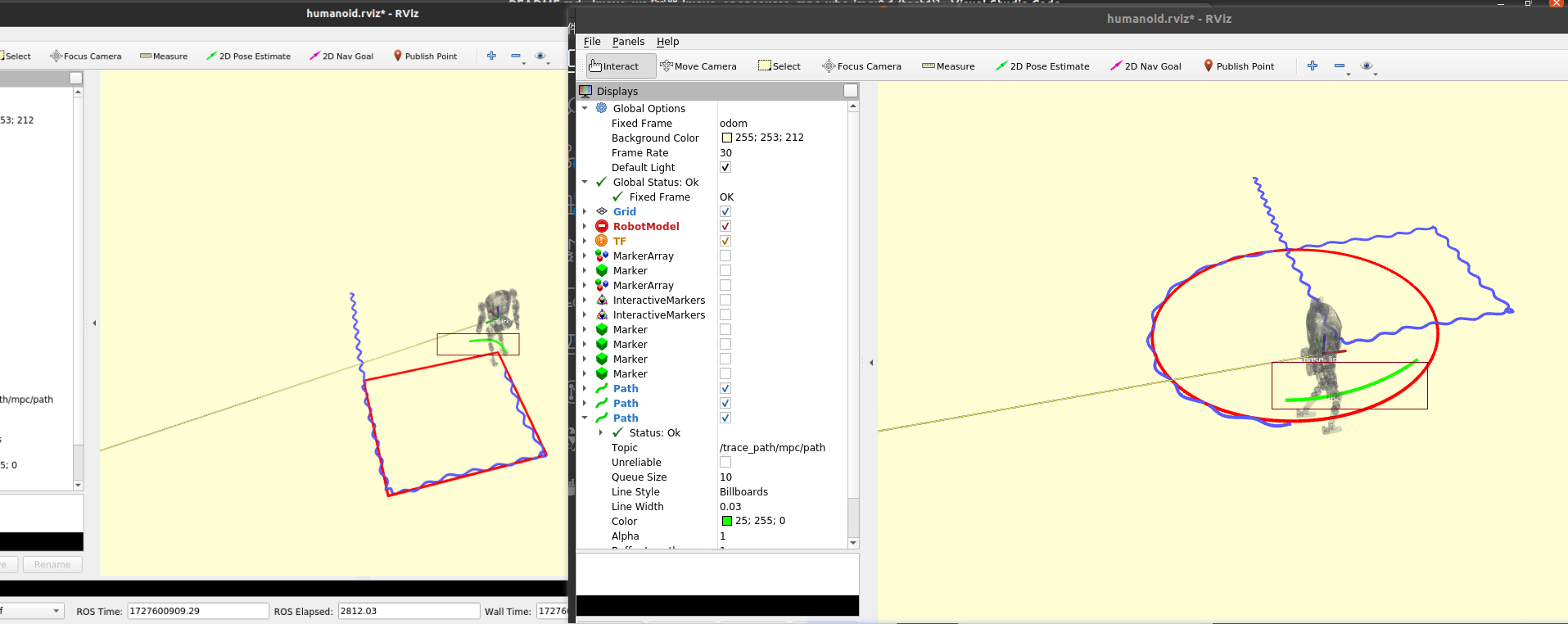
| 正方形路径 | 圆形路径 | S曲线路径 |
|---|---|---|
 |  | 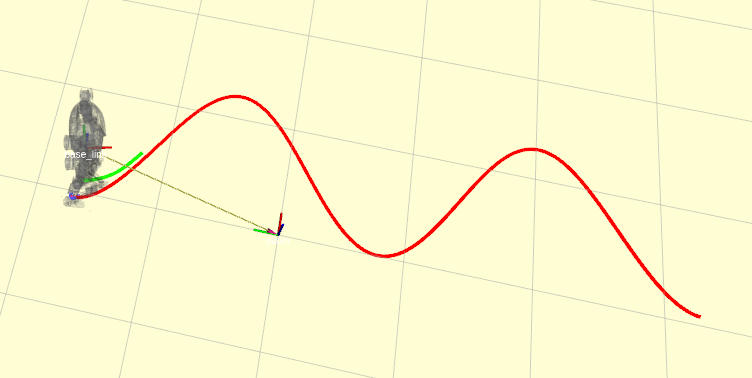 |
控制器
PID
MPC
可通过set_max_linear_velocity和set_max_angular_velocity设置最大线性速度和最大角速度来约束求解
编译
修改 src/demo/trace_path/src/tests/*_main.cc 对应文件的的路径参数和控制器参数,然后编译运行:
cd ~/kuavo_ws
catkin build trace_path # 编译
启动
终端1:启动机器人程序
若不熟悉如何启动 OCS2 机器人, 请阅读 OCS2 机器人使用文档.
source devel/setup.bash # 如果使用zsh,则使用source devel/setup.zsh
# 仿真环境运行
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch # 启动控制器、mpc、wbc、仿真器
# 实物请运行
roslaunch humanoid_controllers load_kuavo_real.launch # 启动实物节点
终端2:生成轨迹并跟踪
启动参数:
rviz可视化参考路径和实时路径(可选):rviz:=true
source devel/setup.bash
# 正方形轨迹跟踪
roslaunch trace_path follow_sqaure_traj.launch
# 圆形轨迹跟踪
roslaunch trace_path follow_circle_traj.launch
# S曲线轨迹跟踪
roslaunch trace_path follow_s_curve_traj.launch
关键话题
- 获取机器人在世界坐标系的位置
- 获取当前位置设置为起点,生成
nav_msgs/Path格式的路径轨迹 - 通过向机器人订阅的
/cmd_vel话题发送消息命令,控制其运动 - 如何通过 PID/MPC 控制调整机器人沿着路径轨迹运动
获取机器人位置信息
话题:/odom
消息:nav_msgs/Odometry
控制机器运动
话题:/cmd_vel
消息:geometry_msgs/Twist
rostopic pub /cmd_vel geometry_msgs/Twist "linear:
x: 0.1
y: 0.0
z: 0.0
angular:
x: 0
y: 0.0
z: 0.0" -r 1000
路径表示
消息:nav_msgs/Path
show nav_msgs/Path
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/PoseStamped[] poses
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
发布话题
trace_path/path: 跟踪的给定固定路径(正方形,圆形,S 曲线...)trace_path/realtime_path: 机器人实时运动轨迹trace_path/mpc/path: MPC 控制器求解的局部路径
效果预览
PID
说明:
- 路径:直线-正方形-圆形-S曲线
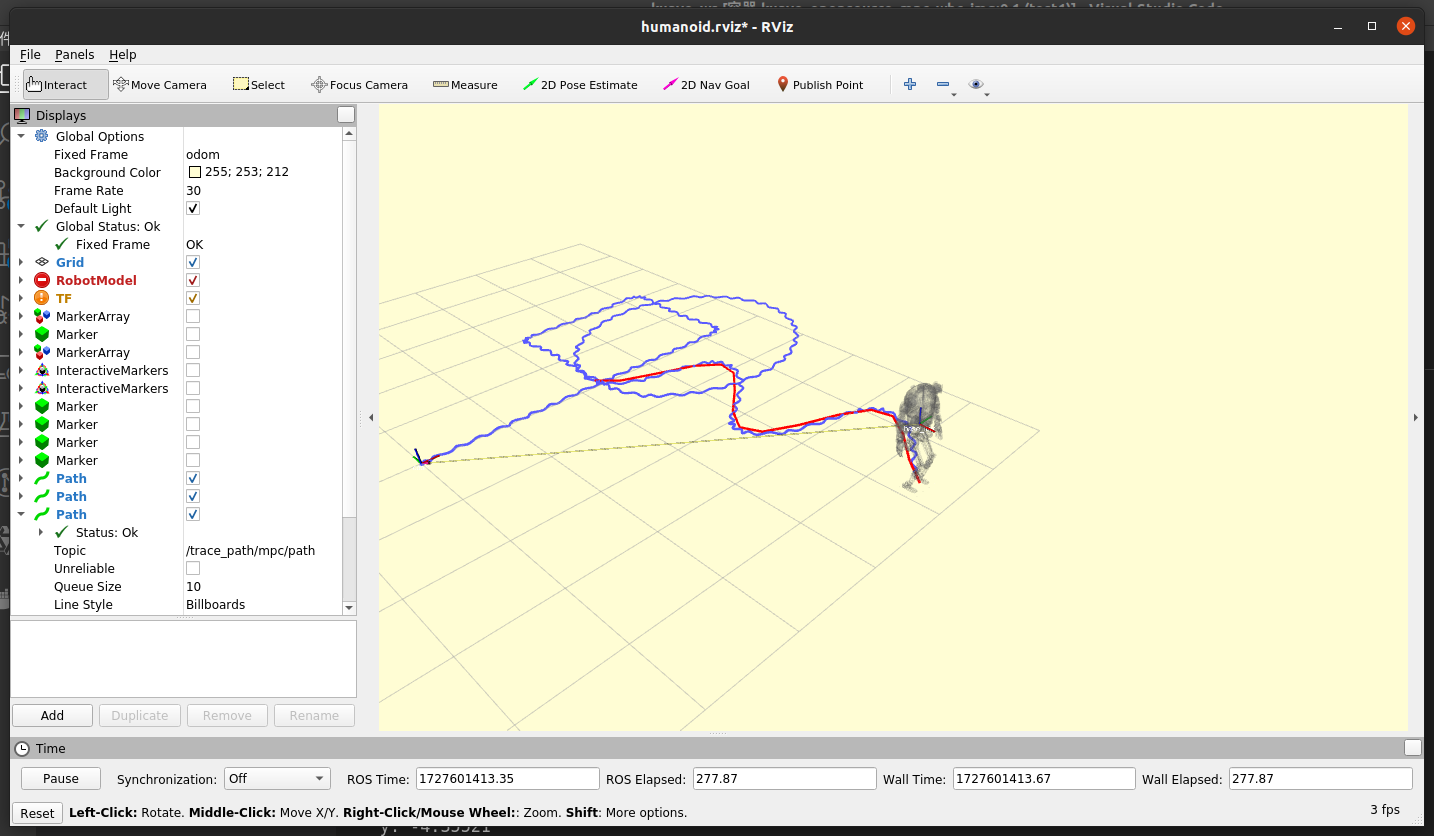
MPC
说明:
- 红色路径为给定的固定轨迹
- 蓝色路径为机器人的行走产生的跟踪轨迹
- 绿色为 MPC 求解的局部轨迹