humanoid_arm_control
本案例基于视觉识别 apriltag ,控制手臂抓取对应的物体。同时。本案例还包含了其他一些示例如下:
- 通过按键控制手臂末端移动
- 运行固定的抓取轨迹
依赖
sudo apt install ros-noetic-apriltag-ros
python3 -m pip install numpy-quaternion # and more..
编译
catkin build humanoid_arm_control
配置文件说明
配置文件在目录config/下,其中:
armcontrol_config.json配置了 IK 使用到的 URDF 模型,armservice_config.json为本案例服务的配置文件,主要内容如下:preset_action_path: 预设抓取动作路径,tag_id: 识别 tag 的 idtarget_offsets: 可微调整与 tag 位置的 xyz 偏移量来控制抓取点。
运行
配置 ROS 主从机参数
查看下位机躯干NUC 的 IP 地址:
ip addr
2: enp4s0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 10:7c:61:76:a2:14 brd ff:ff:ff:ff:ff:ff
inet 192.168.3.15/24 brd 192.168.3.255 scope global dynamic noprefixroute enp4s0
valid_lft 6144sec preferred_lft 6144sec
inet6 fe80::3d06:3f9f:e1c6:da42/64 scope link noprefixroute
valid_lft forever preferred_lft forever
编辑下位机~/.bashrc文件,添加如下内容:
export ROS_MASTER_URI=http://<IP>:11311 # export ROS_MASTER_URI=http://192.168.3.15:11311
编辑上位机~/.bashrc文件,添加如下内容:
export ROS_MASTER_URI=http://<下位机IP>:11311 # export ROS_MASTER_URI=http://192.168.3.15:11311
下位机启动 ROS:
pkill ros
source ~/.bashrc
roscore &
上位机启动 apriltag 检测节点
git clone https://www.lejuhub.com/ros-application-team/kuavo_ros_application.git
git checkout dev
catkin build
# 启动节点
source devel/setup.bash
roslaunch dynamic_biped sensor_robot_enable.launch
启动 humanoid_controllers 节点
humanoid_controllers 节点编译和启动可阅读本仓库 README 文档,在此不作赘述。
source devel/setup.bash # 如果使用zsh,则使用source devel/setup.zsh
# 仿真环境
roslaunch humanoid_controllers load_normal_controller_mujoco_nodelet.launch # 启动仿真器
# 实物运行
roslaunch humanoid_controllers load_kuavo_real.launch # 启动实物节点
启动本服务节点
source devel/setup.bash
rosrun humanoid_arm_control ArmService_flask.py
等待客户端请求服务接口。
ROS 服务接口
/arm_control
rosservice info /arm_control
Node: /arm_service
URI: rosrpc://ohh-lejurobot:39837
Type: humanoid_arm_control/armControl
Args: req tagid
参数说明:
- req: 请求类型,目前支持:0-识别抓取,1-运行左手固定位置抓取轨迹,2-运行右手固定位置抓取轨迹
- tagid: apriltag id
调试
tag 信息 mock 工具
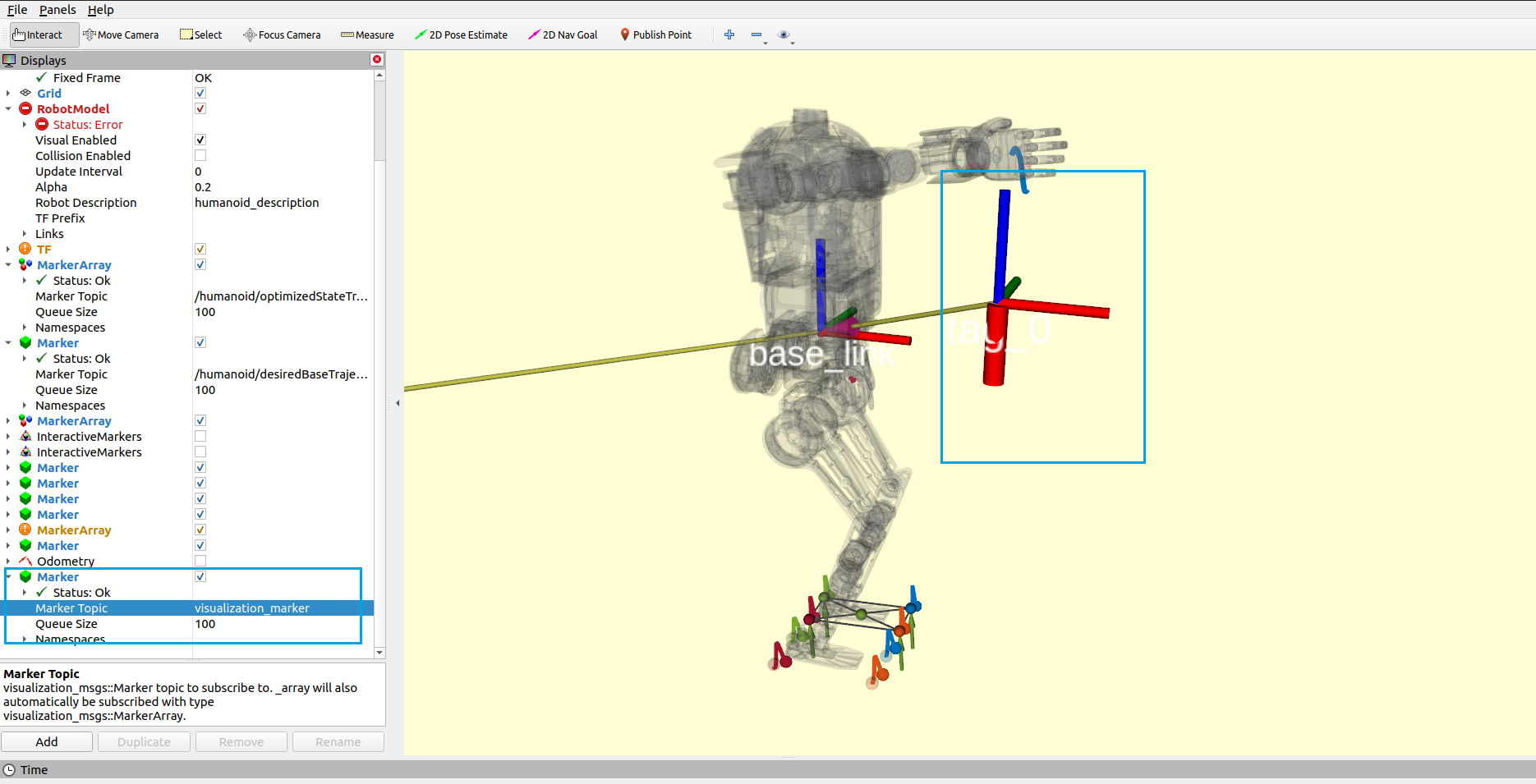
该工具提供了 apriltag 信息模拟发布功能,您可以修改脚本中 tag 的信息,然后运行脚本即可 mock。该工具主要用于在无需启动相机的 情况下,方便调试。
source devel/setup.bash
rosrun humanoid_arm_control mock_tag_publisher.py
如下图,执行该脚本后,可在 RVIZ 中查看到 tag的位置和对应的 marker。
抓取服务请求示例
执行该脚本,机器人会根据识别到的 apriltag 信息进行抓取。
source devel/setup.bash
rosrun humanoid_arm_control client_test.py
左手固定抓取轨迹
执行该脚本,机器人会执行左手固定的抓取轨迹。
source devel/setup.bash
rosrun client_test_left_fixed_traj.py
右手固定抓取轨迹
执行该脚本,机器人会执行右手固定的抓取轨迹。
source devel/setup.bash
rosrun client_test_right_fixed_traj.py
其他
按键控制手臂示例
详细内容请阅读说明文档。
source devel/setup.bash
rosrun humanoid_arm_control arm_control_with_keyboard.py
# output:
# .....
# -------- 按键控制手臂运动:
# ws: 控制 x 轴
# ad: 控制 y 轴
# qe: 控制 z 轴
# 按 Ctrl-C 退出
手臂控制轨迹示例
source devel/setup.bash
rosrun humanoid_arm_control run_fix_trajectory_keyboard.py
# output:
# .....
# [WARN] [1730190936.211059]: ------------------------------------------
# [WARN] [1730190936.215381]: 按 '1' 键执行固定轨迹 1
# [WARN] [1730190936.220309]: 按 '2' 键执行固定轨迹 2
# [WARN] [1730190936.222282]: 按 '3' 键执行固定轨迹 3
# [WARN] [1730190936.224592]: 按 'esc' 键退出程序
# [WARN] [1730190936.226502]: ------------------------------------------