单步接口上楼梯案例说明
- 非视觉上楼梯脚本:
stairClimbPlanner.py - 视觉上楼梯案例依赖:
stairClimbPlanner-vision.py - 视觉连续上楼梯脚本:
stairClimbPlanner-vision-continuous.py - 视觉功能依赖上位机的楼梯识别库,需要确保先配置好(查看后续章节)
固定位置上楼梯执行
- 将机器人放于楼梯前固定距离(大概2cm),执行脚本
rosrun humanoid_controllers stairClimbPlanner.py即会根据规划的轨迹进行上楼梯(注意主函数可能会用于测试,自行打开上楼梯的注释即可) - 一些函数注解:
- plan_up_stairs:上楼梯轨迹规划
- plan_down_stairs:下楼梯轨迹规划
- plan_move_to:移动到指定位置轨迹规划每个函数支持传递前一次规划的轨迹进去继续进行规划,比如可以先走台阶、再走平地、再走台阶....可以自行在主函数中实现规划组合
- 上楼梯的成功率非常依赖于轨迹的调控,一些参数如下:
self.dt = 0.6 # 腾空步态周期
self.ss_time = 0.5 # 支撑相时间
self.foot_width = 0.10 # 足宽
self.step_height = 0.13 # 台阶高度
self.step_length = 0.28 # 台阶长度,28,13
- 直接修改参数能够适合大部分情况,如果出现碰撞或者不稳定等情况时,可能需要调整plan_swing_phase中的参数,规划腾空相轨迹
视觉上楼梯调试
1. 上位机配置
- 上位机连接胸部D435相机和腰部Orbbec相机
上位机环境配置
- 上位机配置好容器环境(目前镜像里面上位机的环境都需要根据以下配置方便使用)
- 配置sudo免密
sudo nano /etc/sudoers
# 在文件末尾添加:
# kuavo ALL=(ALL) NOPASSWD:ALL
- 配置普通用户加入docker用户组,避免重复输入密码
sudo groupadd docker
sudo usermod -aG docker ${USER}
sudo service docker restart
newgrp docker
- 下载容器镜像并导入
docker load -i kuavo_staircase_sdk_2004_v1.0.tar.gz
- 克隆kauvo-terrain仓库,切换到最新的楼梯识别分支:
git clone https://www.lejuhub.com/highlydynamic/kauvo-terrain.git
cd kauvo-terrain
# 使用四代
git checkout robot_real_stair_vision
# 使用五代
git checkout robot_real_s52
- 打开容器编译:
cd kuavo-terrain
./docker/stair_docker_start.sh # 注意要使用这个脚本新建容器,后续方便在下位机调用
# 进入容器之后,编译
catkin build
如果使用Orbbec相机,需要在kuavo_ros_application中启动,若使用D435相机则忽略这一步
- 克隆kuavo_ros_application仓库
git clone https://gitee.com/leju-robot/kuavo_ros_application.git
cd kuavo_ros_application
catkin build
source devel/setup.bash
roslaunch orbbec_camera gemini_330_series.launch
上位机建图测试
- 建图之前需要先在下位机启动机器人,维护odom的tf树,否则无法可视化
- 配置xhost允许可视化输出到vnc, 在普通用户的终端执行:
export DISPLAY=:1.0; xhost +
建图前需要修改配置文件
kuavo-terrain/data/slam/backend/terrain_runner/sites/leju_terrain_params.yaml- 若使用
D435相机:将depth_sensor_type设置为2,terrain_data_source设置为1 - 若使用
Orbbec相机:将depth_sensor_type设置为1,terrain_data_source设置为3
- 若使用
进入容器,运行建图:
docker start kuavo_gendexgrasp_staircase_estimation_dev
docker exec -it kuavo_gendexgrasp_staircase_estimation_dev bash
## 运行腾讯sdk建图
./leju_terrain_run.sh
## 新开一个终端,重新进入容器,启动辅助节点(发布tf关系、后处理等)
docker exec -it kuavo_gendexgrasp_staircase_estimation_dev bash
source devel/setup.bash
## 如果使用胸部D435相机
roslaunch vision_staircase_estimation one_start_all.launch
## 如果使用腰部Orbbec相机
roslaunch vision_staircase_estimation one_start_all_orbbec.launch
- 此时连接上位机的VNC界面,即可看到建图和楼梯识别的效果
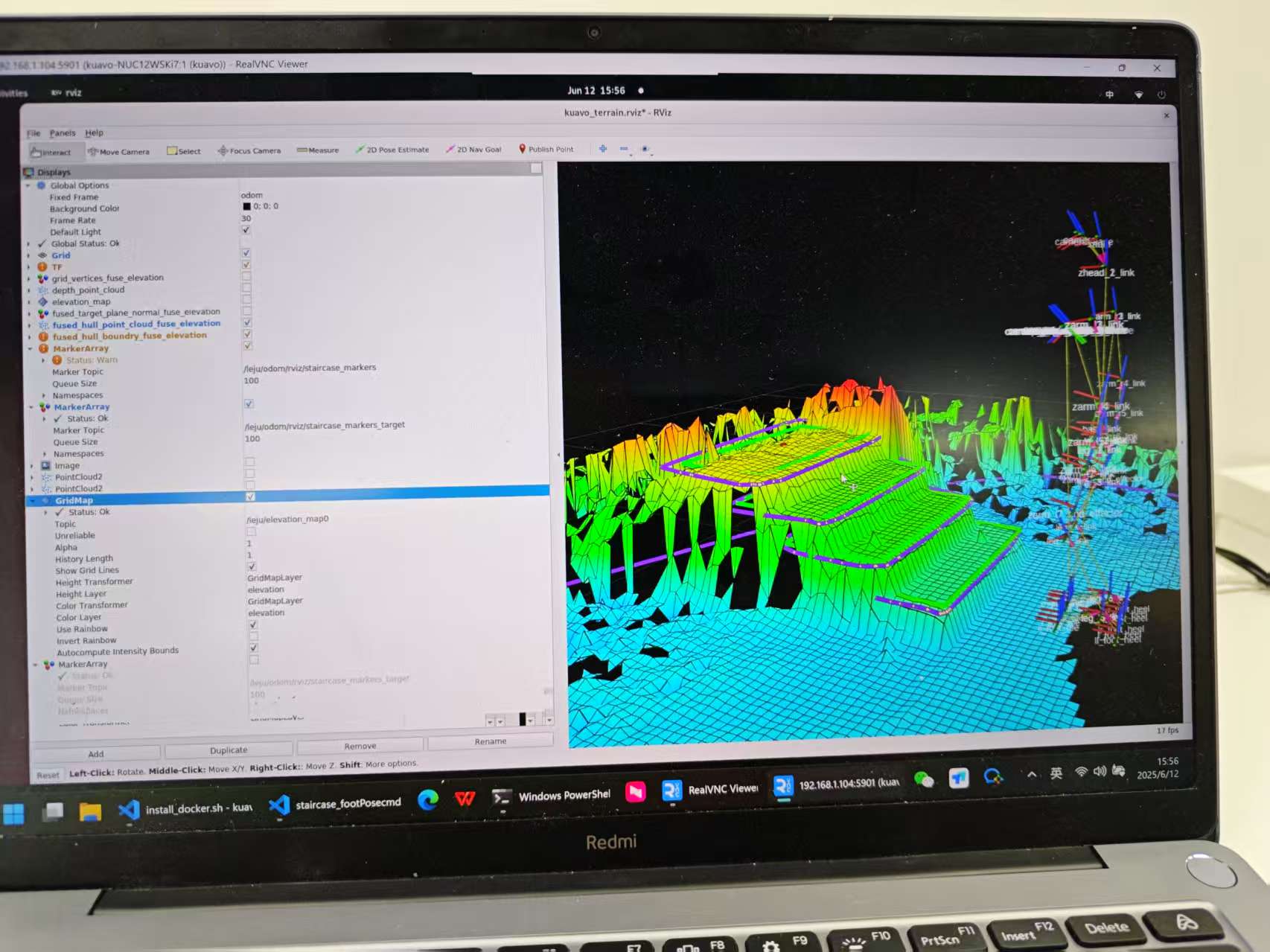
确认楼梯识别正常,没有识别出来多余的楼梯平面,地面高度和脚掌高度一致并且不倾斜(重要!!!)
如果出现识别结果不准,对应的一些解决方法:
- 建图有许多空洞,尖刺:
- 可能是摄像头点云输出不正常了,相机需要校准,并且确保安装上去没有压迫或者遮挡(十分容易导致深度图像不正常)
- 高程图的地面高度和实际机器人脚掌高度不一致:
- 相机安装精度问题,微调下位机使用的urdf中的细节位置
- 若使用
胸部D435相机,例如,调整src/kuavo_assets/models/biped_s45/urdf/biped_s45.urdf中的torso-camera和躯干链接的joint的高度 - 若使用
腰部Orbbec相机,可以在上位机kuavo-terrain/src/vision_staircase_estimation/launch/one_start_all_orbbec.launch中调整waist-camera与camera_link的tf2静态变换的偏移量;也可以在下位机调整src/kuavo_assets/models/biped_s45/urdf/biped_s45.urdf中的waist-camera和base_link链接的joint的高度
- 高程图和机器人倾斜:
- 一样可以通过根据建图效果调整相机姿态让地面变成水平
- 建图有许多空洞,尖刺:
上述调整和校准只做一次,后续都无需登录上位机进行校准
2. 下位机配置
- 下位机正常使用主分支(后续走楼梯功能会合并到主分支)即可,一些说明:
- 可能需要根据建图效果调整urdf中的相机姿态
src/humanoid-control/humanoid_controllers/scripts/upper_computer_service.py中提供了一个上位机执行远程调用的服务,在上位机配置好建图环境之后,并且确认楼梯识别正常,即可全程在下位机执行上楼梯功能- upper_computer_service.py节点通过
load_kuavo_real.launch正常启动,并提供以下服务:- 自动连接上位机ssh
- 提供ros服务开启和关闭上位机高程图的功能(
/kuavo/start_stair_detection和/kuavo/stop_stair_detection)
stairClimbPlanner-vision.py是基于视觉和单步接口上楼梯的脚步,可以实现在第一级楼梯前任意距离往前行走到楼梯前面开始上楼梯- 依赖于
stairClimbPlanner.py中的接口和固定的楼梯参数(楼梯高度、宽度、级数等)
- 依赖于
前面准备工作做好之后,上楼梯启动流程:
- 在第一级楼梯前任意距离,启动建图
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch
- 启动上位机服务
rosservice call /kuavo/start_stair_detection
- 确认识别结果之后,启动上楼梯节点, 马上开始上楼梯
# 非连续上楼梯脚本
rosrun humanoid_controllers stairClimbPlanner-vision.py
# 连续上楼梯脚步
rosrun humanoid_controllers stairClimbPlanner-vision-continuous.py
为了避免干扰,需要尽量在楼梯前面一段距离才启动上位机建图服务,每次上楼梯前都需要重新启动上位机建图服务,避免上一次结果得干扰 平地走到楼梯前面的安全距离(safe_distance),可以根据实际机器人执行情况进行调整,调整之后没有硬件变动一般不会改变;安全距离是第一级楼梯中心距离机器人base的距离
3. 上位机ssh服务接口和遥控器绑定
- 为了方便使用建图和上楼梯功能,对使用方法进行了封装
- 上位机服务节点
src/humanoid-control/humanoid_controllers/scripts/upper_computer_service.py提供了通过ssh调用上位机的通用功能- 包含ssh自动连接,在上位机阻塞/非阻塞执行shell指令、阻塞/非阻塞执行容器内指令(建图等)
- 配置文件位于
src/humanoid-control/humanoid_controllers/scripts/remote-config.json commands中预定义了一些上位机的指令container-commands中预定义了一些容器内指令,如开启建图、开启腾讯sdk等upper_computer_service.py还提供了一些ros接口,用于其他节点调用上位机的建图等功能/kuavo/start_stair_detection:开启建图/kuavo/stop_stair_detection:关闭建图/kuavo/start_stair_detection_orbbec:开启建图(使用Orbbec相机)/kuavo/stop_stair_detection_orbbec:关闭建图(使用Orbbec相机)
- 北通遥控器增加了组合按键绑定执行shell指令的功能
- 在
src/humanoid-control/humanoid_controllers/config/commands.yaml中配置了遥控器按键和指令的对应关系 - 目前绑定的按键是:
- 开启上位机建图功能:
RT+Y - 执行上楼梯脚本:
LT+B - 具体是通过rosservice调用
upper_computer_service.py中的服务调用上位机或者执行rosrun启动节点实现注意:在使用orbbec相机时,遥控器启动,需要自行修改
commands.yaml中的指令,将start_staircase_detection改为调用奥比中光相机启动的servicestart_staircase_detection_orbbec
- 开启上位机建图功能:
- 在