Demo - 行走特定轨迹
运行
修改src/humanoid-control/humanoid_interface_ros/scripts/walkTrajectory.py文件的中的路径参数,执行以下命令 :
chmod +x src/humanoid-control/humanoid_interface_ros/scripts/walkTrajectory.py # 添加可执行权限
source devel/setup.bash
rosrun humanoid_interface_ros walkTrajectory.py
注意事项: 由于是通过简单的速度控制走轨迹路径,因此速度请勿过大.
路径轨迹
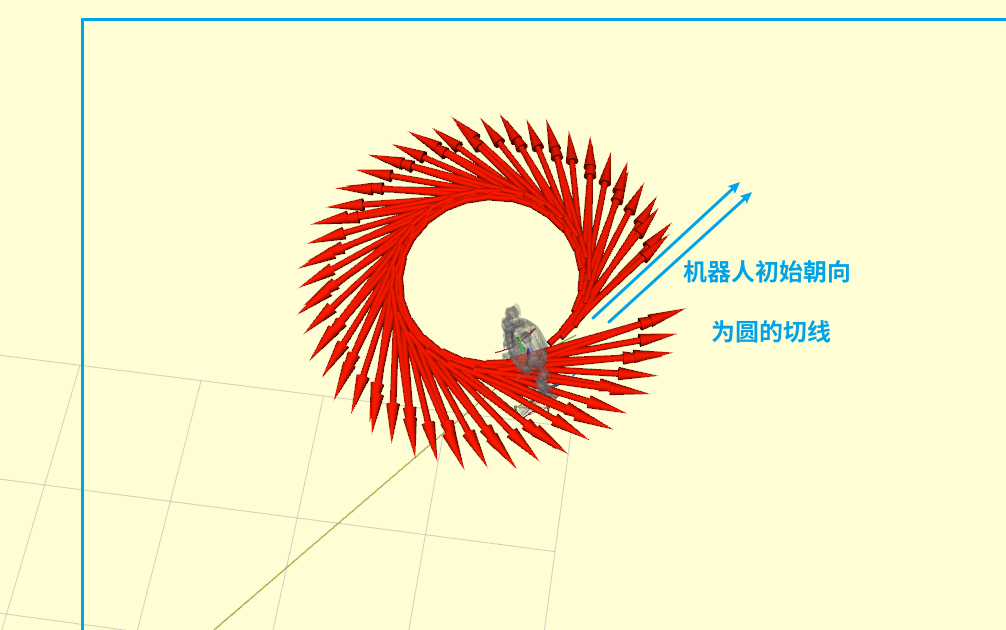
圆形
机器人保持恒定的 yaw_v 和线性速度一直运动即可得到圆形轨迹。
参数说明:
- radius :半径
- yaw_v:yaw 方向速度
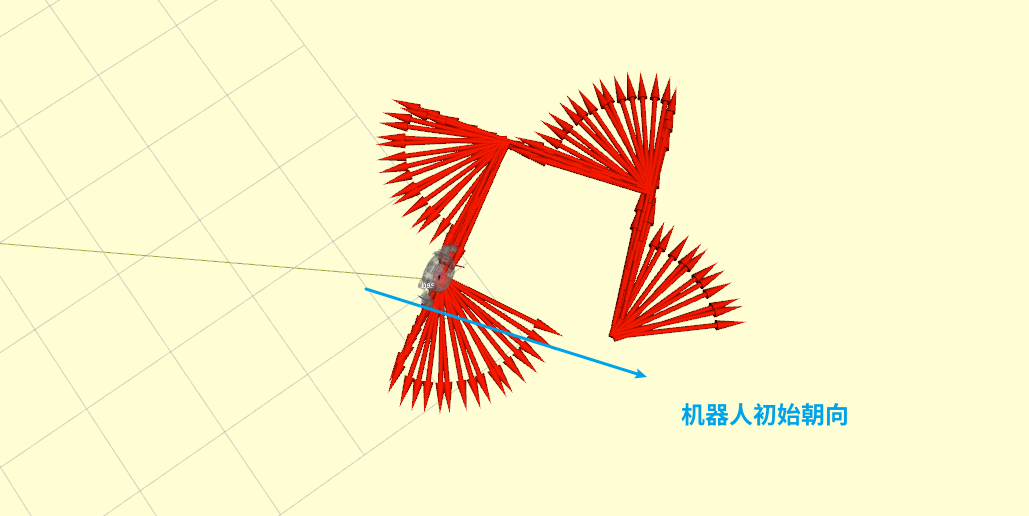
正方形
正方形轨迹由直线-转弯90度-直线-转弯90度-直线-转弯90度-直线构成。
参数说明:
- side_length:正方形边长
- x_v:x 轴线性速度
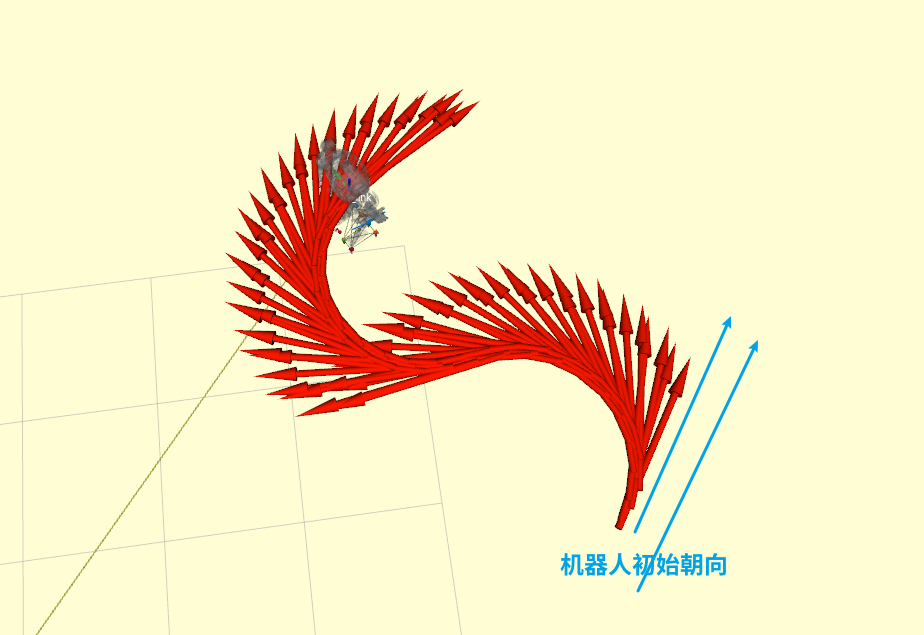
S 曲线
曲线轨迹由半圆-直线-半圆构成。
参数说明:
- radius :曲线的半径
- yaw_v:yaw 方向速度