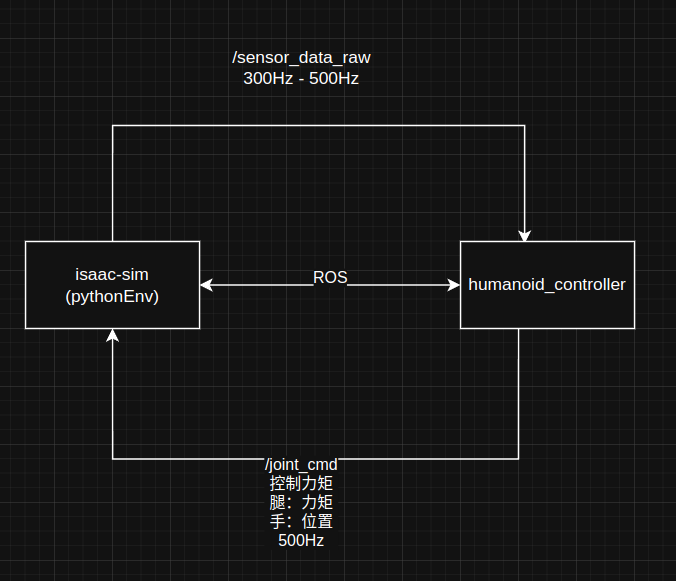
isaac-sim 服务端 / 客户端实现
- 此库用于isaac-sim的state状态 与 控制器的直接交互
系统环境要求
- 硬件要求:需要安装至少
GeForce RTX 3070的GPU环境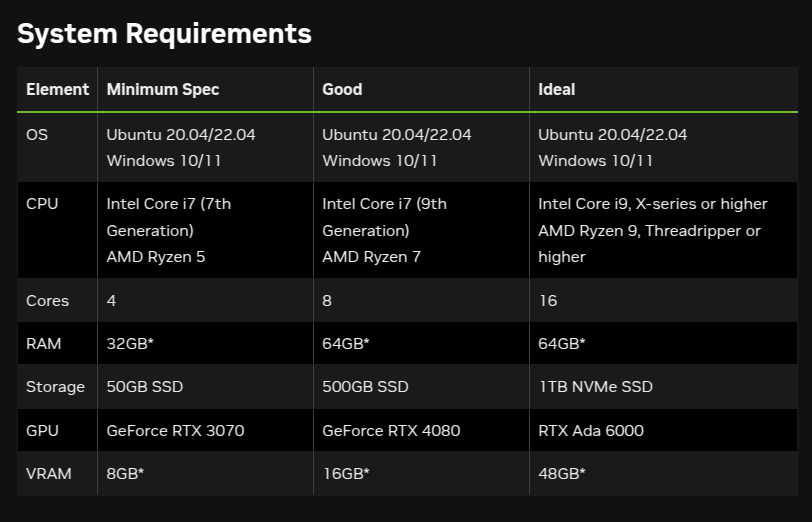
- isaac-sim版本要求:
isaac-sim-4.1.0- Download Isaac Sim Link
- 请将下载好的isaac-sim源码环境放入至
/home/$USER/.local/share/ov/pkg
- 请注意,
omni_python为isaac-sim的pythonEnv环境索引,指向的目录为如下,请你在本机环境当中一定要正确进行设置到bashrc当中
alias omni_python
alias omni_python='/home/$USER/.local/share/ov/pkg/isaac-sim-4.1.0/python.sh'
├── controller_tcp # launch功能包
├── nio-isaac # issac-sim客户端,用于维护机器人、场景、启动isaac-sim
架构
build
- 编译isaac-sim仿真功能包
cd ~/kuavo-ros-control/
catkin build isaac_sim humanoid_controllers
- kuavo-ros-control控制器可用分支如下
* KangKK/dev/isaac-sim_controller_import_wbc
* opensource/0214_produce
* opensource/CASTest

启动
启动OCS2控制器 | 启动isaac-sim仿真
roslaunch humanoid_controllers load_kuavo_isaac_sim.launch joystick_type:=bt2pro
关键launch解析【参数配置写入到launch当中解析】
- launch.py : isaac-sim客户端,用于维护开启场景
- isaac_sim_nodelet_no_tcp.launch
<launch>
<!-- Add robot version argument -->
<arg name="isaac_robot_version" default="$(optenv ROBOT_VERSION 45)"/>
<arg name="use_camera_ros_topic_flag" default="1"/>
<arg name="use_point_cloud_flag" default="0"/>
<arg name="scene_index" default="2"/>
<arg name="robot_scene_point_index" default="1"/>
<param name="isaac_robot_version" value="$(arg isaac_robot_version)"/>
<param name="use_camera_ros_topic_flag" value="$(arg use_camera_ros_topic_flag)"/>
<param name="use_point_cloud_flag" value="$(arg use_point_cloud_flag)"/>
<param name="robot_scene_point_index" value="$(arg robot_scene_point_index)"/>
<param name="scene_index" value="$(arg scene_index)"/>
<node pkg="tcp_cpp" name="isaac_sim_launcher" type="launch.py" output="screen">
</node>
</launch>
启动launch参数说明
# 0 : 车企检测场景
# 1 : 比赛场景
# 2 : 默认地板场景
scene_index
robot_scene_point_index # 机器人初始所在点位 | 根据场景不同,初始点位不同
# 0 : 关闭相机渲染ROS发布
# 1 : 开启相机渲染ROS发布
use_camera_ros_topic_flag # 是否开启相机话题
# 0 : 关闭相机点云ROS发布
# 1 : 开启相机点云ROS发布
use_point_cloud_flag # 是否开启相机点云信息发布【该模式下很吃GPU渲染,请慎重开启】