雷达基础使用
说明
- 机器人雷达位于头部位置,雷达型号为 livox Mid-360。
- 雷达详情页:https://www.livoxtech.com/mid-360
- 雷达资料页:https://www.livoxtech.com/mid-360/downloads
- 雷达官方 github 地址:https://github.com/Livox-SDK
- 雷达出厂默认ip:192.168.1.191,上位机ip:192.168.1.102
⚠️⚠️⚠️ 注意: 使用雷达时, 上位机不能存在其他192.168.1.xx网段的网络连接
驱动下载编译
mkdir -p caktin_livox_ros_driver2/src
cd caktin_livox_ros_driver2/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
cd livox_ros_driver2
sros1
./build.sh ROS1
配置文件修改
- 配置文件路径:
livox_ros_driver2/config/MID360_config.json - 将
cmd_data_ip、push_msg_ip、point_data_ip、imu_data_ipip 改为 192.168.1.102 - 将雷达ip改为:192.168.1.191
运行
cd caktin_livox_ros_driver2
source devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
雷达点云数据可视化
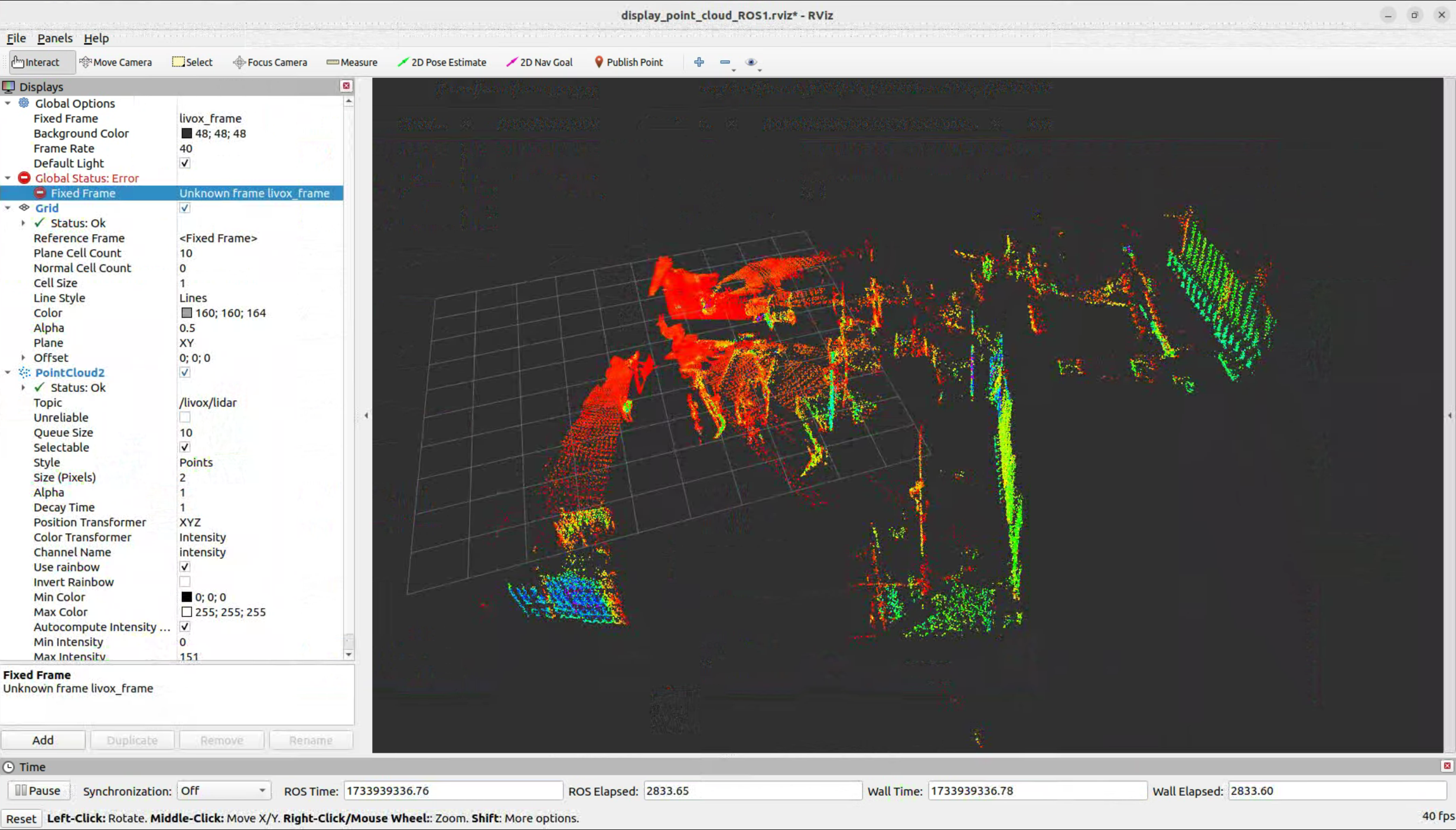
消息话题
/livox/imu: 雷达内置imu信息/livox/lidar: 雷达点云数据信息