yolov8目标检测案例
- yolov8目标检测案例
功能包与代码结构
功能包:
yolo_box_object_detection用于箱子识别的 YOLO ROS 功能包- 功能包路径:
~/kuavo_ros_application/src/ros_vision/detection_industrial_yolo/yolo_box_object_detection
- 功能包路径:
示例代码
- 路径:
/home/lab/kuavo-ros-opensource/src/demo/examples_code/yolo_detect/yolo_detect_info.py yolo_detect_info.py: 获取一次/object_yolo_box_tf2_torso_result检测结果基于机器人基座标系的位姿
- 路径:
📦 箱子识别
如果需要得到快递盒相对于机器人的位置信息,即订阅object_yolo_box_tf2_torso_result“话题,需要先让机器人站立。 使用前需要打开摄像头
cd ~/kuavo_ros_application
source /opt/ros/noetic/setup.bash
source ~/kuavo_ros_application/devel/setup.bash
# 旧版4代, 4Pro
roslaunch dynamic_biped load_robot_head.launch
# 标准版, 进阶版, 展厅版, 展厅算力版
roslaunch dynamic_biped load_robot_head.launch use_orbbec:=true
# MaxA版, MaxB版
roslaunch dynamic_biped load_robot_head.launch use_orbbec:=true enable_wrist_camera:=true
🎯 针对于 YOLOv8 训练模型检测调用
- 🔍 yolo_box_object_detection -- 箱子识别 YOLO ROS 功能包
📁 模型路径及说明
- 📂 路径:
~/kuavo_ros_application/src/ros_vision/detection_industrial_yolo/yolo_box_object_detection
- 📄 模型格式:
.pt - 🗂️ 模型路径:
~/kuavo_ros_application/src/ros_vision/detection_industrial_yolo/yolo_box_object_detection/scripts/models/
打开检测程序
cd ~/kuavo_ros_application
source /opt/ros/noetic/setup.bash
source ~/kuavo_ros_application/devel/setup.bash
roslaunch yolo_box_object_detection yolo_segment_detect.launch
- 如果上位机为agx或NX可能或出现下面报错:

在终端输入下面命令:
echo 'export LD_PRELOAD=/usr/lib/aarch64-linux-gnu/libgomp.so.1:$LD_PRELOAD' >> ~/.bashrc
开一个新的终端重新打开检测程序。
如果需要可视化检测效果,需要打开rqt_image_view或rviz(需要接显示屏或者远程桌面查看),订阅object_yolo_box_segment_image话题查看效果
📡 箱子识别 ROS 话题订阅
/object_yolo_box_segment_result # 基于相机坐标系下的箱子中心点的3D位置
/object_yolo_box_segment_image # 识别箱子的绘制结果
/object_yolo_box_tf2_torso_result # 基于机器人基坐标系下的箱子中心点的3D位置
💻 yolo_box_object_detection 功能包代码说明 (头部 NUC)
yolo_box_segment_ros.py:- 调用模型检测并获取识别框中心点三维坐标位置
- 发布到
/object_yolo_box_segment_result - 过滤低于 0.6 置信度的结果
yolo_box_transform_torso.py:- 订阅
/object_yolo_box_segment_result - 将坐标转换到机器人基坐标系
- 发布转换结果到
/object_yolo_box_tf2_torso_result
- 订阅
🔧 识别姿态四元数说明
- 📄 查看
yolo_box_transform_torso.py文件第 71-74 行,由于检测只获取检测目标中心点空间位置无姿态信息,四元数为固定值非实际值
使用GPU加速说明
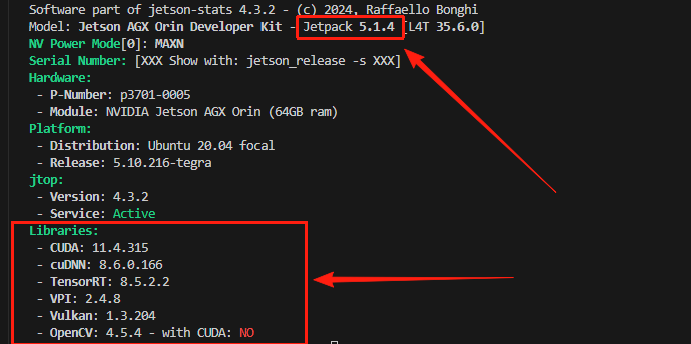
⚠️⚠️⚠️ 该部分仅适用于进阶版和Max版用户 ⚠️⚠️⚠️ 该部分仅适用于jetpack是5.1.4版本且CUDA是11.4版本
- 查询方式
- 终端执行
sudo -H pip install -U jetson-stats安装工具 - 终端执行
jetson_release查看本地环境 - 若下图红框中部分与终端结果一致,即可参考此文档使用GPU进行加速
- 终端执行
安装 PyTorch、Torchvision 和 Ultralytics
- 新镜像自带以上依赖项,对于携带旧版镜像且需要使用GPU加速检测的设备,才需要补充安装 PyTorch、Torchvision 和 Ultralytics
⚠️ 安装顺序非常重要:
torch -> torchvision -> ultralytics
原因:
- torch 是核心底层
- torchvision 依赖 torch
- ultralytics 依赖 torch,可调用 torchvision transforms
- Jetson 内已编译好的 CUDA+cuDNN+JetPack,torch 必须匹配 CUDA 和 JetPack,否则自动安装可能出错
1. 确认是否已安装 torch
- 新开终端
pip3 show torch- not found -> 安装 torch
- 显示版本 -> 根据后续文档判断是否是可使用的torch,若不是则需要根据后续文档卸载安装
- 确定 Jetson NX/AGX 上位机 版本:
dpkg-query --show nvidia-l4t-core参考英伟达开发者官网,本例显示 35.6.0,对应 JetPack 5.1.4 版本
- 确认 python3 版本:
python3 --version本例中Python版本为3.8.10
- 删除旧 torch 防止冲突:
sudo pip3 uninstall torch torchvision torchaudio -y - 参考英伟达官方论坛找到合适版本的 torch(JetPack 5.1.4 对应 PyTorch 2.0.0)
2. 安装 PyTorch 2.0.0(JetPack 5.1.4 / CUDA 11.4)
- 下载 whl 文件(可通过 SSH 传输到 Jetson NX/AGX 上位机):
wget https://nvidia.box.com/shared/static/i8pukc49h3lhak4kkn67tg9j4goqm0m7.whl \
-O torch-2.0.0+nv23.05-cp38-cp38-linux_aarch64.whl - 安装依赖:
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev libomp-dev
pip3 install 'Cython<3'
pip3 install numpy torch-2.0.0+nv23.05-cp38-cp38-linux_aarch64.whl - 验证安装:
python3 -c "import torch; print(torch.__version__)"输出示例:
2.0.0+nv23.05,安装成功
3. 安装 Torchvision(对应 0.15.1)
参考文档链接,安装对应版本的torchvision,此处如图对应0.15.1

安装依赖:
sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libopenblas-dev \
libavcodec-dev libavformat-dev libswscale-dev克隆源码并安装:
git clone --branch v0.15.1 https://github.com/pytorch/vision torchvision
cd torchvision
git fetch --tags
git tag | grep v0.15.1
git checkout tags/v0.15.1
export BUILD_VERSION=0.15.1
pip install 'pillow<7'
python3 setup.py install --user验证安装:
pip install "urllib3<2"
python3 -c "import torchvision; print(torchvision.__version__)"输出示例:
0.15.1,安装成功
4. 安装 Ultralytics
- 安装:
pip3 install ultralytics==8.0.196 -i https://pypi.tuna.tsinghua.edu.cn/simple
python3 -c "import ultralytics; print(ultralytics.__version__)"输出版本信息即为安装成功
修改代码及运行
说明
- 对于 YOLOv8,其程序中调用了
ultralytics,ultralytics会自动依赖当前环境下的torch。 - 镜像自带的是 GPU 版本的
torch,因此程序会自动使用 GPU 加速。 - 在 GPU 环境下,如果想测试 CPU 运行效果,需要手动指定设备为 CPU,下面提供显式指定CPU/GPU检测的办法。
代码段位置
- 编辑文件
~/kuavo_ros_application/src/ros_vision/detection_industrial_yolo/yolo_box_object_detection/scripts/yolo_box_segment_ros.py在def main()内找到如下代码段:
# 使用 Ultralytics 加载模型
model_path = os.path.join(rospkg.RosPack().get_path('yolo_box_object_detection'), 'scripts/models/best.pt')
model = YOLO(model_path)
显式指定运行设备为 CPU
修改代码:
# 使用 Ultralytics 加载模型
model_path = os.path.join(
rospkg.RosPack().get_path('yolo_box_object_detection'),
'scripts/models/best.pt'
)
model = YOLO(model_path).to('cpu')运行效果如图所示:
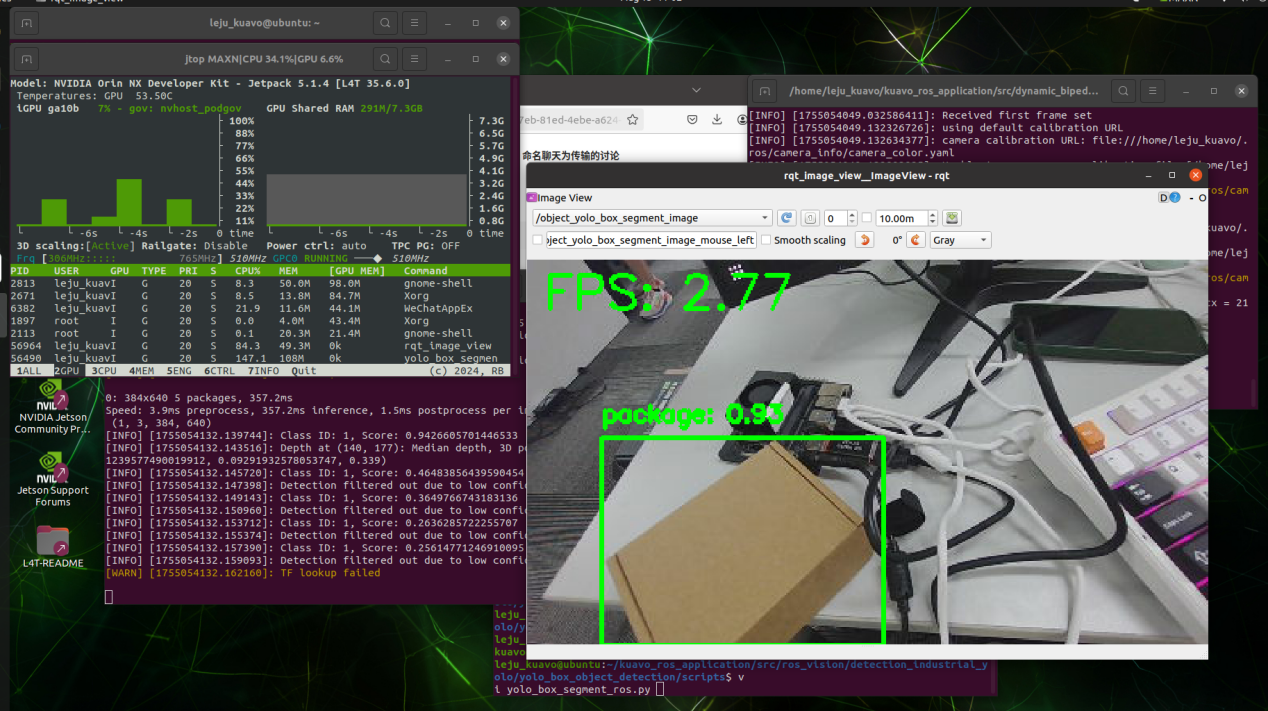
- GPU 占用率几乎不升高
- 帧率为个位数
- ✅ 可验证 CPU 模式正常工作
显式指定运行设备为 GPU
修改代码:
# 使用 Ultralytics 加载模型
model_path = os.path.join(
rospkg.RosPack().get_path('yolo_box_object_detection'),
'scripts/models/best.pt'
)
model = YOLO(model_path).to('cuda')运行效果:
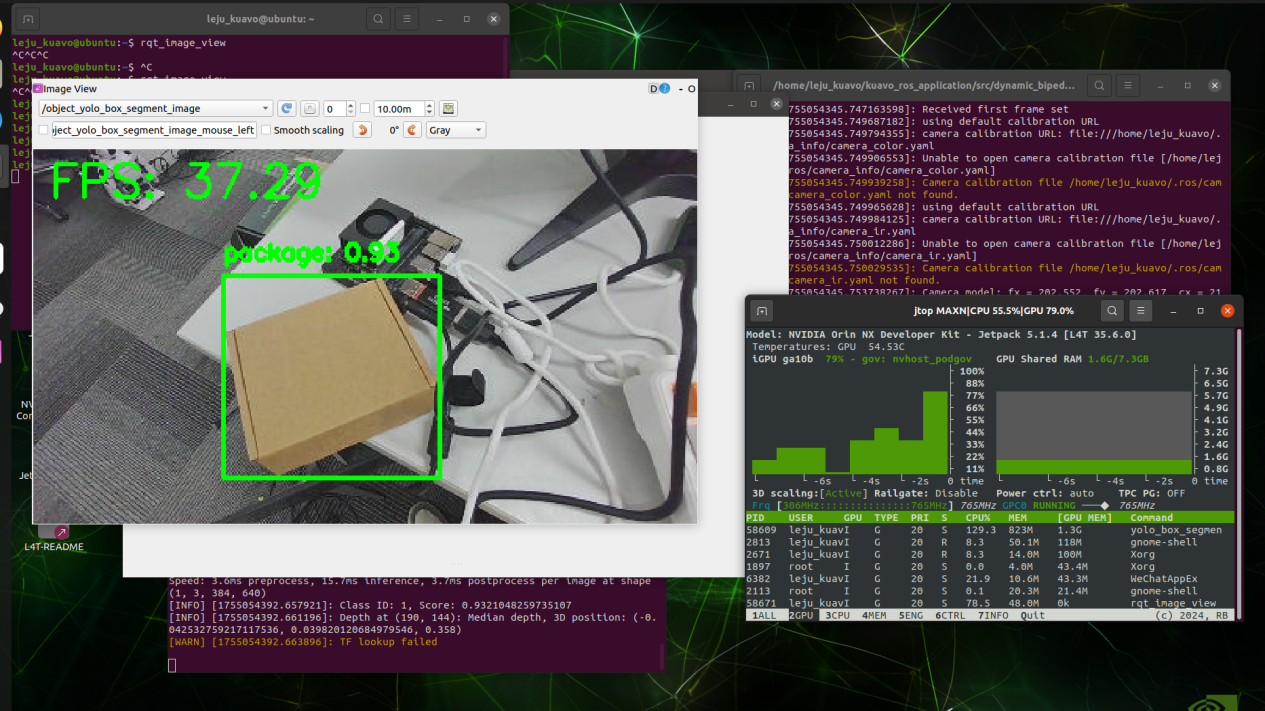
- GPU 占用率明显上升
- 帧率可达到 30+ FPS
- ✅ 可验证 GPU 模式正常加速