🔄数据转换
数据集格式说明
- ⚠️⚠️⚠️ 若从数采平台直接导出lerobot格式数据包,可跳过此章节。
🤖 Kuavo IL 是一个完整的机器人模仿学习框架,基于 LeRobot 构建,专为 Kuavo 人形机器人设计。该框架提供了从数据转换、模型训练到实际部署的完整工具链。
🎯 核心特性:
- 🔄 数据转换: 支持 ROS bag 到 LeRobot 格式的转换
- 🚀 一键训练: 提供数据转换与模型训练的一体化解决方案
- 🎮 实时部署: 支持训练模型在实际机器人上的实时推理和控制
- 📊 完整评估: 提供离线评估和在线部署的完整验证流程
🏗️ 项目架构:
kuavo-il-opensource/
├── kuavo/ # 核心功能模块
│ ├── kuavo_1convert/ # 数据转换工具
│ ├── kuavo_2train/ # 模型训练工具
│ ├── kuavo_3deploy/ # 模型部署工具
│ └── notebooks_check/ # 数据验证与可视化
└── lerobot/ # LeRobot 框架
🚀 快速开始
训练环境安装
git clone https://gitee.com/leju-robot/kuavo-il-opensource.git
cd kuavo-il-opensource
- 创建虚拟环境
conda create -n kuavo_il python=3.10
conda activate kuavo_il
- 安装依赖
# 安装 LeRobot
pip install -e lerobot
📦 数据准备
目录结构
推荐的数据集目录结构如下:
your_task_name/
├── rosbag/ # 数采平台导出解压的bag包
└── sup_bag/ # 辅助的bag包(可选,如到达机器人起始工作位置的go_bag)
数据转换流程
Kuavo IL 支持从 ROS bag 数据快速转换为 LeRobot 格式。转换前需要先配置 kuavo_1convert/lerobot_dataset.yaml 文件:
配置文件
使用lerobot_dataset.yaml进行配置:
only_arm: true # 默认true, 是否只使用手臂数据, 目前的模仿学习只用于手臂数据
eef_type: dex_hand # or leju_claw
which_arm: both # 可选: left, right, both
# task_description: "Pick the black workpiece from the white conveyor belt on your left and place it onto the white box in front of you"
task_description: "Place the black workpiece from the white desk onto the electronic scale, then move the it to the left white conveyor belt"
train_hz: 10 # 训练采样频率
main_timeline_fps: 30 # 主相机的帧率,必须稳定, 主相机来自head_cam_h, wrist_cam_l, wrist_cam_r
sample_drop: 10 # 丢弃回合前后的10帧
# dex_dof_needed是强脑手需要的自由度数目。强脑灵巧手有6个自由度。标准握拳状态[100] * 6, 张开状态[0] * 6。
# 1: 不需要精细操作或者多指协同操作时,通常为设置为1,表示只需要第一个关节作为开合依据,此时需要用[0, 100, 0, 0, 0, 0]表示张开状态, [100] * 6表示握拳状态。
# 2(暂未测试): 或者设置为2,目前的手柄遥操作只有两个自由度。0,2,3,4,5自由度绑定为1个自由度。
# 6(暂未测试): 如果脱离手柄使用手指灵巧操作,可以设置为6,表示需要所有6个自由度。
dex_dof_needed: 1 # default=1
is_binary: false # 是否将开合二值化, default=false
delta_action: false # 是否使用增量动作,default=false
relative_start: false # 是否使用相对起始位置, default=false
resize:
width: 848
height: 480
主要配置项说明
eef_type: 末端执行器类型,可选'dex_hand'(灵巧手)或'leju_claw'(乐聚夹爪)which_arm: 使用的手臂,可选'left'(左臂)、'right'(右臂)或'both'(双臂)train_hz: 训练数据的采样频率main_timeline: 用于时间对齐的主时间线话题dex_dof_needed: 灵巧手使用的自由度数量
转换代码
Zed: 如果相机是zed相机,需要把kuavo/kuavo_1convert/common/config_dataset.py第51行cameras = ['head_cam_h']修改为cameras = ['head_cam_l']
# 转换 ROS bag 到 LeRobot 格式
python kuavo/kuavo_1convert/cvt_rosbag2lerobot.py --raw_dir RAW_DIR [-n NUM_OF_BAG] [-v PROCESS_VERSION]
# 例:
python kuavo/kuavo_1convert/cvt_rosbag2lerobot.py --raw_dir kuavo/kuavo_1convert/Task0_example/rosbag -v v_example
必选参数: --raw_dir RAW_DIR 原始ROS包目录路径
可选参数: -n NUM_OF_BAG 要处理的包文件数量 -v PROCESS_VERSION 处理版本(默认'v0','v_example'是一个示例)
注:转换后的lerobot数据在指定存放在装载RosBag数据集的文件夹的同级目录,本案例的转换后目录结构如下
kuavo/kuavo_1convert/Task0_example
├── rosbag
│ └── example.bag
└── v_example
└── lerobot
├── data
│ └── chunk-000
│ └── episode_000000.parquet
├── meta
│ ├── episodes.jsonl
│ ├── info.json
│ ├── stats.json
│ └── tasks.jsonl
└── videos
└── chunk-000
├── observation.images.head_cam_h
│ └── episode_000000.mp4
└── observation.images.wrist_cam_r
└── episode_000000.mp4
转换完成后可以可视化数据集:
# 可视化转换完毕的 lerobot dataset:
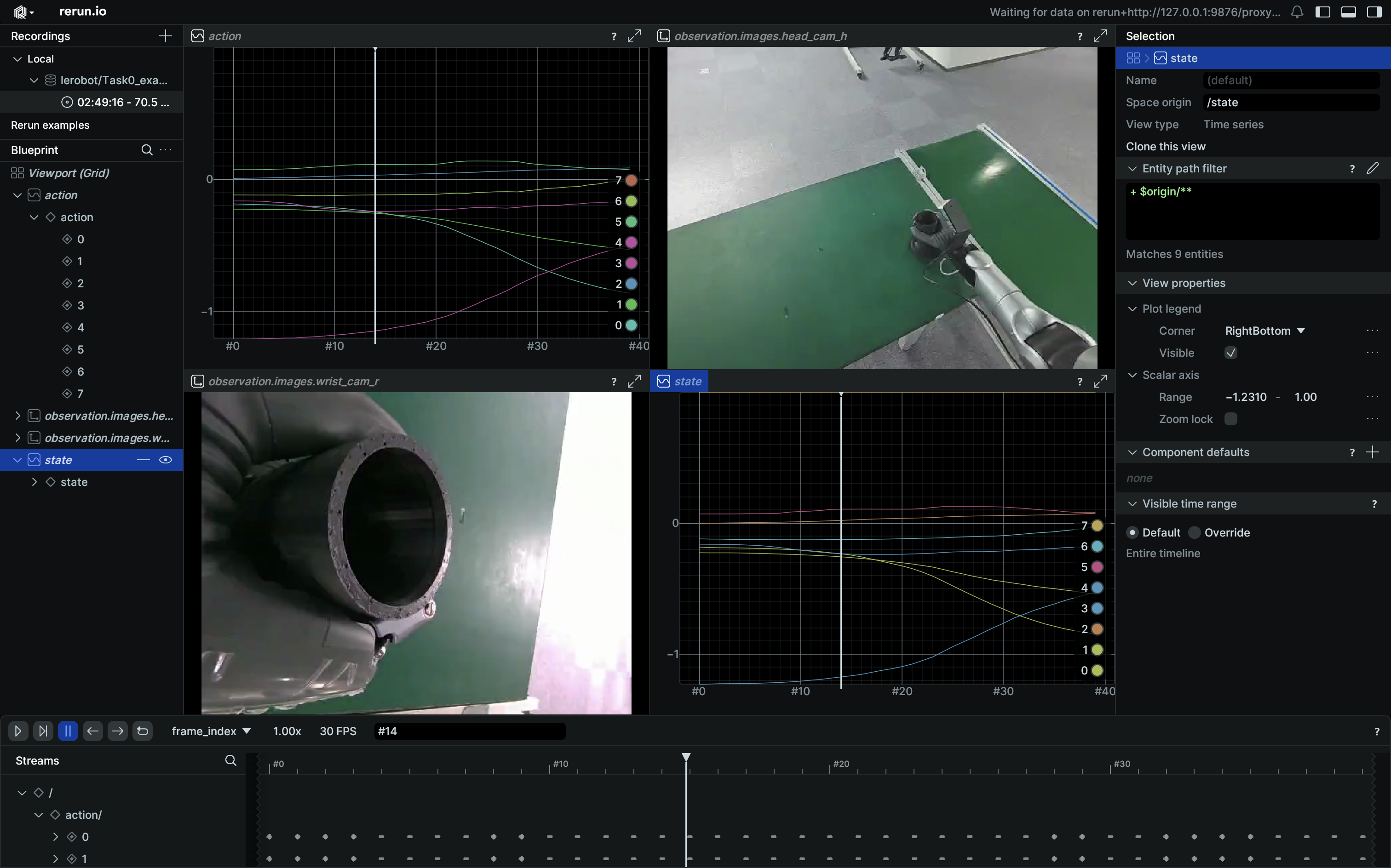
python lerobot/lerobot/scripts/visualize_dataset.py --repo-id lerobot/Task0_example --root kuavo/kuavo_1convert/Task0_example/v_example/lerobot --episode 0 --local-files-only 1
这是Task0_example的可视化:
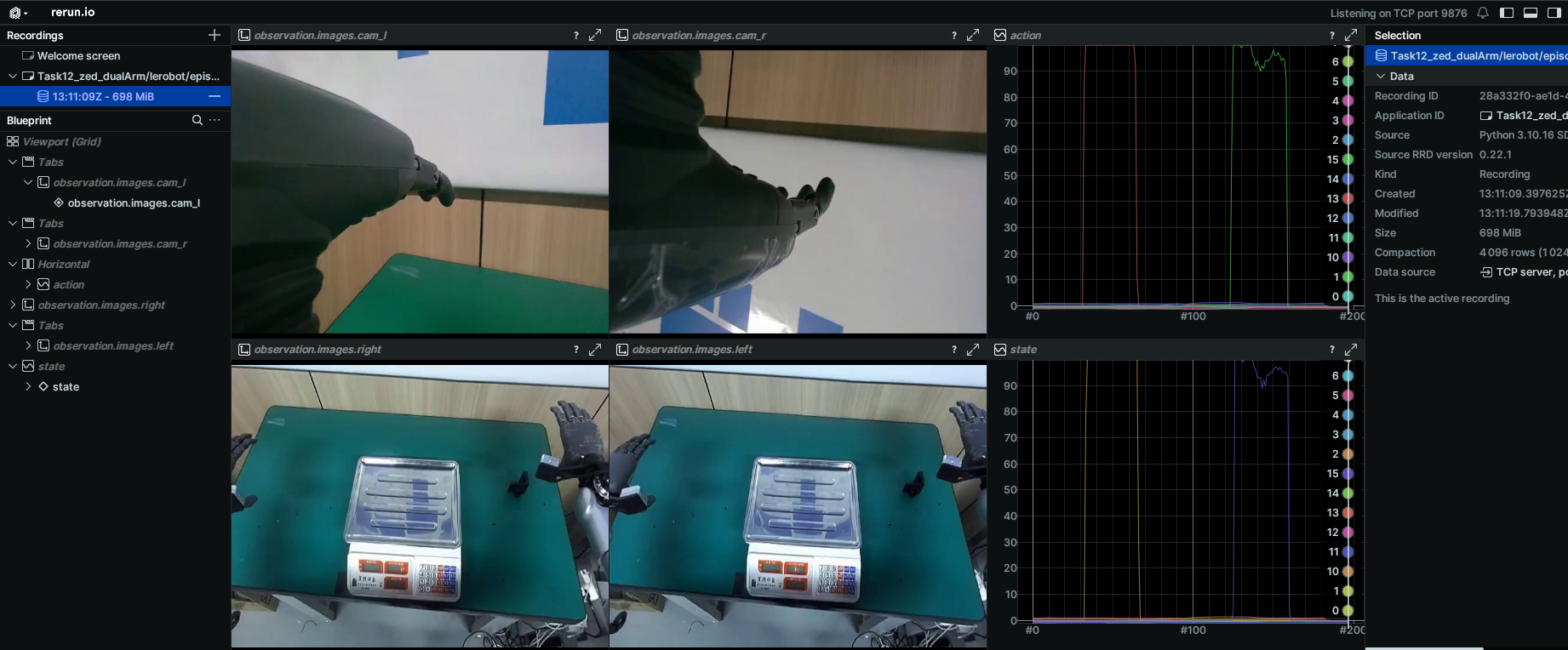
 以下是一个双臂操作的可视化示例:
以下是一个双臂操作的可视化示例:
bag转换zarr(此案例主线未使用zarr格式,仅做演示)
1.进入仓库
cd kuavo-il-opensource
2.进行格式转换
python /home/lejurobot/tjy/kuavo-il-opensource/kuavo/kuavo_1convert/cvt_rosbag2zarr.py -b /home/lejurobot/mydisk/data/Task17_cup/rosbag -c /home/lejurobot/tjy/kuavo-il-opensource/kuavo/kuavo_1convert/config/Task14_cup.yaml -n 3 -a
[注]: 转换代码格式如下
Python [转换脚本]
-b [bag数据集文件]
-c [配置文件路径(根据bag话题修改对应的yaml文件,内包含不同话题的处理方法以及抽帧值)]
-n [需要处理的bag包数量]
-a [如果需要合并多个任务的数据,这里可以加上-a]
-l [图像的压缩质量,越小质量越低(0-100)]