强化学习案例lab版
0. 概述
本案例简单介绍如何使用乐聚开源的强化学习运动控制仓库leju_robot_rl实现对乐聚夸父机器人的训练和部署。
1. 效果展示
sim2sim
sim2real
2. 环境准备 (Environment Preparation)
- 系统要求:Ubuntu 20.04/22.04 LTS
在开始之前,请确保完成以下环境配置步骤。推荐使用 Conda 创建独立的虚拟环境。
下载所需软件
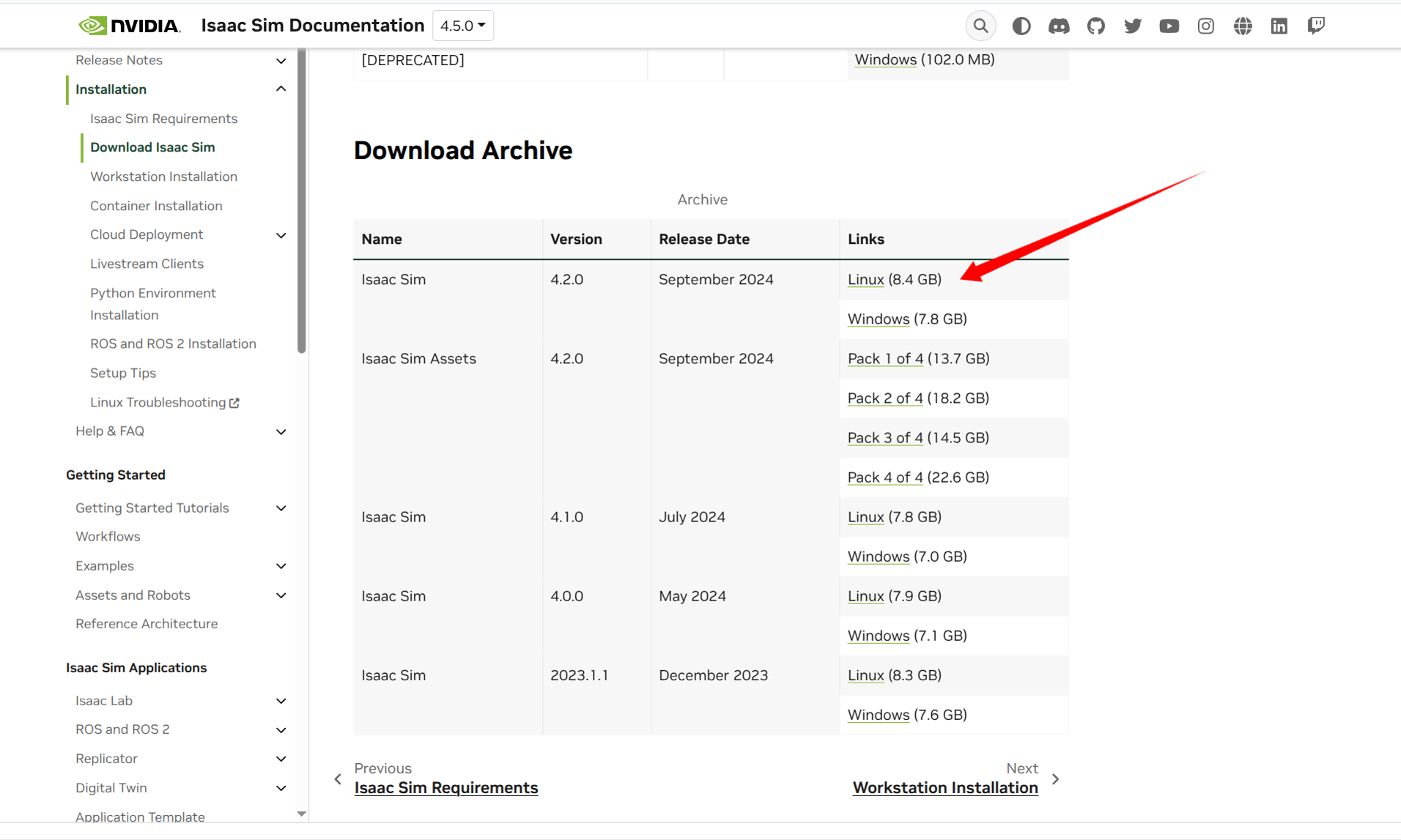
- 下载 Isaac Sim 4.2 ,流程参考:

- 下载 Isaac Lab 1.4.1 (本例将Isaac Lab下载至主目录下),流程参考:

- 若在上述网址没能找到Isaac Sim 4.2 的安装路径,可参考4.5版本的网址,如图:
- 下载 rsl_rl,推荐使用
commit 386875591808cfd1462a42446b1fa0a22ac161d0
git clone https://github.com/leggedrobotics/rsl_rl.git
cd rsl_rl
git checkout 386875591808cfd1462a42446b1fa0a22ac161d0- 下载 Isaac Sim 4.2 ,流程参考:
设置软链接
- 在 Isaac Lab 目录下为其 Isaac Sim 创建软链接。
ln -s {isaacsim_path} _isaac_sim创建并配置 Conda 虚拟环境 (推荐)
重要提示: 开始之前,请务必确保 Conda 的包搜索渠道已正确配置,以
conda-forge为主渠道,并启用严格通道优先级。# 添加 conda-forge 渠道
conda config --add channels conda-forge
# 设置通道优先级为严格
conda config --set channel_priority strict接下来,使用 Isaac Lab 的脚本创建并激活 Conda 环境。
# 创建名为 your_envs_name 的 Conda 环境
./isaaclab.sh --conda your_envs_name
# 激活环境
conda activate your_envs_name配置 Python 环境并安装依赖
注意: 如果不使用 Conda 虚拟环境,后续所有
python命令需替换为~/IsaacLab/isaaclab.sh -p,所有pip命令需替换为~/IsaacLab/isaaclab.sh -p -m pip。使用 Conda 将方便许多。# 进入 Isaac Sim 根目录,执行官方脚本设置环境
# cd /{isaacsim_path}
source setup_python_env.sh
# 进入 Isaac Lab 根目录,安装 rl_games
# cd ~/IsaacLab
./isaaclab.sh --install rl_games
# 进入 leju_robot_rl 项目目录,安装自定义扩展
# cd ~/leju_robot_rl
pip install -e leju_robot_rl/exts/ext_template
# 进入 rsl_rl 库目录,进行本地安装
# cd {rsl_rl_path}
pip install -e .确认成功安装Isaac Lab 1.4.1
- 请使用Isaac Lab官方文档网站确认您的Isaac Lab成功安装后,再进行后续步骤。
3. 模型训练 (Train Your Model)
- 克隆leju_robot_rl仓库
git clone https://gitee.com/leju-robot/leju_robot_rl.git
训练开始前,需要对以下文件进行修改。
禁用关节加速度更新(IsaacLab下)
文件路径:
/{isaaclab_path}/source/extensions/omni.isaac.lab/omni/isaac/lab/assets/articulation/articulation_data.py修改内容: 注释掉
self.joint_acc这一行。# around line 82 in articulation_data.py
def update(self, dt: float):
# update the simulation timestamp
self._sim_timestamp += dt
# Trigger an update of the joint acceleration buffer at a higher frequency
# since we do finite differencing.
# self.joint_acc # <- 注释掉此行
完成以上修改后,即可运行
train.py脚本开始训练。# conda activate your_env
# cd leju_robot_rl
python scripts/rsl_rl/train.py \
--task Legged-Isaac-Velocity-Flat-Kuavo-S42-v0 \
--num_envs 4096 \
--headless
4. 模型转换 (Convert .pt to .onnx)
训练完成后,将 PyTorch 模型文件 (.pt) 转换为机器人部署所需的 ONNX 格式 (.onnx)。
- 运行
play.py脚本。
# cd leju_robot_rl
python scripts/rsl_rl/play.py \
--task Legged-Isaac-Velocity-Flat-Kuavo-S42-Play-v0 \
--num_envs 32
- 脚本会自动加载训练好的
.pt模型,并生成对应的.onnx文件。 - 新生成的
.onnx模型文件文件位置为leju_robot_rl/logs/rsl_rl/Kuavo/s42/flat/{time_train}/exported/policy_s42.onnx,将其拷贝至下位机环境或真实机器人上,目标位置为/home/lab/kuavo-rl-opensource/kuavo-robot-deploy/src/humanoid-control/humanoid_controllers/model/networks。
5. 模型部署 (Deploy to Sim/Real)
将训练好的模型部署到仿真环境或真实机器人上。
- 下载kuavo_rl_opensource仓库
git clone -b beta https://gitee.com/leju-robot/kuavo-rl-opensource.git
- 修改
launch文件,文件位置为/home/lab/kuavo-rl-opensource/kuavo-robot-deploy/src/humanoid-control/humanoid_controllers/launch。
- 如果是将模型部署至仿真环境,则对
load_kuavo_mujoco_sim.launch进行修改; 如果是将模型部署至真实机器人,则对load_kuavo_real.launch进行修改:
# 原有代码为:
<arg name="rl_param" default="$(find humanoid_controllers)/config/kuavo_v$(arg robot_version)/rl/skw_rl_param.info"/>
# 应修改为:
# 确保程序使用的是flat_csp.info
<arg name="rl_param" default="$(find humanoid_controllers)/config/kuavo_v$(arg robot_version)/rl/flat_csp.info"/>
- 修改
flat_csp.info文件,文件位置为/home/lab/kuavo-rl-opensource/kuavo-robot-deploy/src/humanoid-control/humanoid_controllers/config/kuavo_v46/rl:
- 将其中引用的原始
.onnx模型更改为新生成的模型。
# 原有代码为:
networkModelFile /policy_s46_demo.onnx;
# 将其修改为:
# 确保程序使用的模型是您训练生成的:
networkModelFile /your_new_model.onnx;
- 我们的代码仓库里提供了一个基于该案例训练好的模型
policy_s46_demo.onnx可以直接使用
- 编译
cd kuavo-rl-opensource/kuavo-robot-deploy/
sudo su
export ROBOT_VERSION=46
source installed/setup.bash
catkin build humanoid_controllers
- 启动:
H12遥控器控制说明
实物启动
- 启动前确保
E建在最左边,F建在最右边。 - 机器人缩腿后
F键拨到最左边是站立。 - 在机器人站立后,依次按下对应进入强化学习模式和解锁的按键。此时可以通过摇杆控制机器人。
E键拨到最右边是停止程序(注意此时机器人不会自动下蹲)
- 启动前确保
强化学习H12遥控器建位说明: 跳转
⚠️ 注意: 如果您的下位机部署了h12遥控器的开机自启动服务,运行该案例前需要依次执行 sudo systemctl stop ocs2_h12pro_monitor.service 和 sudo pkill -f ros 然后再继续下列步骤。
# 新开终端
cd kuavo-rl-opensource/kuavo-robot-deploy
sudo su
export ROBOT_VERSION=46
source devel/setup.bash
# 仿真环境下
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch joystick_type:=sim # 启动rl控制器、wbc、仿真器。
# 实物环境下
roslaunch humanoid_controllers load_kuavo_real.launch joystick_type:=h12 # 可以选择cali:=true和cali_arm:=true进行校准启动,但校准启动不会自动缩腿,需要把F键拨到最左边两次,第一次是执行缩腿,第二次是执行站立 。
注意:仿真和实物选择一个启动即可。也可通过键盘控制,joystick_type参数指定为sim即可,终端有按键功能提示。