ARM ACTION SERVER
安装
编译功能包
catkin build humanoid_controllers humanoid_plan_arm_trajectory
catkin build planarmwebsocketservice安装依赖
cd src/manipulation_nodes/planarmwebsocketservice
pip install -r requirements.txt运行
cd <catkin_workspace>
source devel/setup.bash
# kuavo 仿真
roslaunch humanoid_controllers load_kuavo_mujoco_sim.launch
# bezier 曲线
roslaunch humanoid_plan_arm_trajectory humanoid_plan_arm_trajectory.launch
# server 如果是ocs2,请使用参数 robot_type:=ocs2
roslaunch planarmwebsocketservice plan_arm_action_websocket_server.launch robot_type:=kuavo
# client 成功后可以在 RViz 和 Gazebo 中看到动作
python3 ./src/manipulation_nodes/planarmwebsocketservice/scripts/websocket_client_demo.py --action_file_path src/manipulation_nodes/planarmwebsocketservice/action_files/wave_hand.tactaction_file_path为保存动作的tact文件名,该文件需要事先保存在manipulation_nodes/planarmwebsocketservice/action_files文件夹中
注意事项
- 运行之前要确认当前功能包有
action_files, 且包含需要的.tact文件。 - 如果在实机运行,确保 kuavo 程序以 ros 节点运行,并且机器人已经在站立状态。
- 检查参数设置是否指向同一个位置,确保通信中 MD5 校验通过,如:
handler.py中的ACTION_FILE_FOLDERplan_arm_action_websocket_server.py中的ROBOT_ACTION_FILE_FOLDERwebsocket_client_demo.py中的message
部署开机自启动
websocket_deploy_script.sh
主要功能:
- 停止并禁用现有的websocket_start服务
- 更新服务配置文件中的机器人名称和版本
- 设置配置文件权限
- 安装Python依赖和SDK环境
- 重新编译相关ROS包
- 安装sshpass工具
- 启动并启用websocket_start服务
使用方法:
运行部署脚本:添加 websocket_start.service 开机自启动系统服务
cd <catkin_workspace>
bash ./src/manipulation_nodes/planarmwebsocketservice/service/websocket_deploy_script.sh查看日志:websocket 连接和接口调用情况
journalctl -u websocket_start.service -f服务使用
# 服务为开启状态时修改代码,需要重启服务
systemctl restart websocket_start.service
# 手动开启,需要关闭服务以防冲突
systemctl stop websocket_start.service
机器人状态
启动机器人(缩腿)
request:
{
"cmd": "start_robot"
}
response:
{
"cmd": "start_robot",
"data": {
"code": 0,
"message": "Robot started successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| message | string | 启动结果描述 |
站立机器人(伸直腿)
request:
{
"cmd": "stand_robot"
}
response:
{
"cmd": "stand_robot",
"data": {
"code": 0,
"message": "Robot stand command sent successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| message | string | 站立结果描述 |
停止机器人
request:
{
"cmd": "stop_robot"
}
response:
{
"cmd": "stop_robot",
"data": {
"code": 0,
"message": "Robot stopped successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| message | string | 停止结果描述 |
获取机器人当前状态
request:
{
"cmd": "get_robot_launch_status"
}
response:
,{
"cmd": "get_robot_launch_status",
"data": {
"code": 0,
"message": "launched"
}
}
{
"cmd": "get_robot_launch_status",
"data": {
"code": 0,
"status": "launched",
"message": "Get robot status successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| status | string | 机器人当前状态 |
| message | string | 获取机器人状态描述 |
机器人状态说明:
- "unlaunch": 未启动
- "crouching": 屈腿中
- "standing": 站立中
手臂动作服务器
这是一个 websocket 服务器在启动后会在所属网络中广播 robot_info 话题,内容如下:
{
"data": {
"robot_name": ROBOT_NAME,
"robot_ip": ROBOT_IP,
"robot_connect_wifi": ROBOT_CONNECT_WIFI,
"robot_ws_address": ROBOT_WS_ADDRESS,
"robot_ws_logger_address": ROBOT_WS_LOGGER_ADDRESS,
"robot_upload_folder": ROBOT_UPLOAD_FOLDER,
"robot_action_file_folder": ROBOT_ACTION_FILE_FOLDER,
"robot_username": ROBOT_USERNAME,
"robot_mac_address": ROBOT_MAC_ADDRESS,
}
}
robot_info 字段说明如下:
| 字段名 | 类型 | 说明 |
|---|---|---|
| robot_name | str | 机器人名称 |
| robot_ip | str | 机器人当前IP地址 |
| robot_connect_wifi | str | 机器人当前连接的WiFi名称 |
| robot_ws_address | str | 机器人WebSocket服务地址 |
| robot_ws_logger_address | str | 机器人WebSocket日志服务地址 |
| robot_upload_folder | str | 机器人执行文件上传目录(同目录下的upload_files文件夹) |
| robot_username | str | 机器人系统用户名 |
| robot_mac_address | str | 机器人MAC地址 |
| robot_action_file_folder | str | 机器人动作文件存储目录(通常为~/.config/lejuconfig/action_files) |
这些字段用于客户端自动发现机器人、获取机器人网络与动作文件相关信息,便于后续动作文件的上传、执行与管理。
获取机器人信息
request:
{
"cmd": "get_robot_info"
}
response:
{
"cmd": "get_robot_info",
"data": {
"code": 0,
"robot_type": "40"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 |
| robot_type | string | 机器人的类型 |
获取机器人状态
request:
{
"cmd": "get_robot_status"
}
response:
{
"cmd": "get_robot_status",
"data": {
"code": 0,
"is_run": True
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 |
| is_run | bool | 机器人当前运行状态 |
执行脚本命令
request:
{
"cmd": "run_node",
"data": {
"path": "**/main.py"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| path | string | 脚本路径 |
response:
{
"cmd": "run_node",
"data": {
"code": 0,
"msg": "msg"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 1: 文件不存在 |
| msg | string | 信息 |
关闭脚本执行
request:
{
"cmd": "stop_run_node"
}
response:
{
"cmd": "stop_run_node",
"data": {
"code": 0
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 1: 超过5s未关闭 |
预览动作
request:
{
"cmd": "preview_action",
"data": {
"action_filename": "action_name",
"action_file_MD5": "action_file_MD5",
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| action_filename | string | 动作文件名 |
| action_file_MD5 | string | 动作文件MD5 |
response:
{
"cmd": "preview_action",
"data": {
"code": 0,
"status": 0,
"progress": 0
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码,0: 成功 1: 动作文件不存在 2: 请求动作文件 MD5 与本地动作文件的 MD5 不一致 |
| status | int | 状态,0: 完成 1: 执行中 |
| progress | int | 动作执行进度, 单位为毫秒 |
停止预览
request:
{
"cmd": "stop_preview_action",
}
response:
{
"cmd": "stop_preview_action",
"data": {
"code": 0,
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 |
下载音频文件后确认由上位机还是下位机来执行
request:
{
"cmd": "check_music_path",
"data": {
"is_reset_cmd": True,
"music_filename": "music_filename",
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| is_reset_cmd | boolean | 是否是重置遥控器配置指令,重置则该值为 True,单独下载音频该值为 False |
| music_filename | string | 下载音乐文件的名字,单独下载音频的时候传入完整带后缀的文件名,如果改次是重置配置则传入空值 |
response:
{
"cmd": "check_music_path",
"data": {
"code": 0,
"msg": "Body NUC"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 执行结果码,0: 成功,1:失败 |
| msg | string | 执行结果信息,如果 code 为 0,则返回 Body NUC/Head NUC,表示路径;如果 code 为 1 返回错误信息 |
更新 h12 遥控器配置文件
request:
{
"cmd": "update_h12_config"
}
response:
{
"cmd": "update_h12_config",
"data": {
"code": 0,
"msg": "Body NUC"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 执行结果码,0: 成功,1:失败 |
| msg | string | 执行结果信息,如果 code 为 0,则返回 Body NUC/Head NUC,表示音乐存放路径;如果 code 为 1 返回错误信息 |
更新数据采集程序
request:
{
"cmd": "update_data_pilot"
}
response:
{
"cmd": "update_data_pilot",
"data": {
"code": 0,
"msg": "Success"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 执行结果码,0: 成功,1:失败 |
| msg | string | 执行结果信息,如果 code 为 0,则返回 "Success";如果 code 为 1 返回具体错误信息 |
功能说明:
该接口用于更新训练场上位机的数据采集程序。系统会:
- 远程登录到上位机(后面通过 DHCP 配置获取 IP 地址)
- 在上位机指定目录创建必要的文件夹
- 下载最新的数据采集程序文件
- 返回执行结果
注意事项:
- 需要确保环境变量
KUAVO_REMOTE_PASSWORD已正确设置(base64 编码的远程登录密码) - 需要确保网络连接正常,能够访问下载地址
- 上位机需要有足够的磁盘空间存储下载的文件
获取零点
从文件中获取所有电机的零点值
request:
{
"cmd": "get_zero_point"
}
response:
{
"cmd": "get_zero_point",
"data": {
"code": 0,
"zero_pos": list,
"message": "Zero point retrieved successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 |
| zero_pos | list | 零点位置列表单位degree |
| message | string | 结果描述 |
zero_pos列表关节顺序和sensors_data_raw话题一致:
对于ROBOT_VERSION >= 40
- 其中关节数据的数组长度为28, 对应的数据顺序为:
- 前 12 个数据为下肢电机数据,
- 0~5 为左下肢数据, 从髋部到脚踝,
- 6 ~ 11 为右边下肢数据, 从髋部到脚踝,
- 接着 14 个数据为手臂电机数据,
- 12 ~ 18 左臂电机数据, 从肩部到手腕,
- 19 ~ 25 为右臂电机数据, 从肩部到手腕
- 最后 2 个为头部电机数据, 分别为 head_yaw 和 head_pitch
- 前 12 个数据为下肢电机数据,
对于roban ROBOT_VERSION >= 11 ROBOT_VERSION < 20
- 其中关节数据的数组长度为 21, 对应的数据顺序为:
- 第 0 个数据为腰部电机数据
- 1 ~ 12 个数据为下肢电机数据,
- 1 ~ 6 为左下肢数据, 从髋部到脚踝,
- 7 ~ 12 为右边下肢数据, 从髋部到脚踝,
- 接着 8 个数据为手臂电机数据,
- 13 ~ 16 左臂电机数据, 从肩部到手腕,
- 17 ~ 20 为右臂电机数据, 从肩部到手腕
调整零点
设置调整单个电机零点值
request:
{
"cmd": "adjust_zero_point",
"data": {
"motor_index": int,
"adjust_pos": float
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| motor_index | int | 电机索引,顺序和 get_zero_point 中的zero_pos一致 |
| adjust_pos | float | 零点调整值(degree) |
response:
{
"cmd": "adjust_zero_point",
"data": {
"code": int,
"message": str
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 |
设置零点
将接收的零点值写入零点文件
request:
{
"cmd": "set_zero_point",
"data": {
"zero_pos": list
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| zero_pos | list | 零点值(degree),顺序和 get_zero_point 中的zero_pos一致 |
response:
{
"cmd": "set_zero_point",
"data": {
"code": 0,
"message": "Zero point set successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 |
执行或停止指定上传的脚本
该接口用于通过 websocket 启动或停止指定上传的 Python 脚本。
- 当
action_data为"start_action"时,服务器会在后台启动scripts_name指定的脚本文件,并返回执行结果。 - 当
action_data为"stop_action"时,服务器会查找并终止与scripts_name匹配的脚本进程,并返回操作结果。 scripts_name可以带绝对路径,也可以单纯为文件名;如果仅包含文件名,则会默认脚本文件位于上传目录("ROBOT_UPLOAD_FOLDER")的路径,需确保文件存在且有执行权限。- 返回的
code字段表示操作结果,message字段为详细信息。
request:
{
"cmd": "execute_python_script",
"data": {
"action_data": "start/stop_action",
"scripts_name":"**/test.py"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| action_data | string | 启动或停止脚本 |
| scripts_name | string | 脚本名字或路径 |
| response: |
{
"cmd": "execute_python_script",
"data": {
"code": 0,
"message": "message"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 1:参数错误 2:文件不存在 3:脚本执行失败 4:接口内部异常 |
| message | string | 信息 |
执行预置演示程序
request:
{
"cmd": "execute_demo",
"data": {
"demo_name": "demo_name",
"parameters": {}
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| demo_name | string | 演示程序名称,人脸追踪:face_track, S 型曲线行走:trace_path |
| parameters | map | 演示程序参数(可选),参数名和参数值的映射 |
response:
{
"cmd": "execute_demo",
"data": {
"code": 0,
"msg": "Demo execution started"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 1: 演示程序不存在 |
| msg | string | 执行状态信息 |
S 型曲线行走
S 型曲线行走

弧形曲线行走
可配置参数:
| 名称 | 类型 | 描述 |
|---|---|---|
| --length | float | 曲线长度(可选), 默认值为 4.0 m |
| --amplitude | float | 曲线幅度(可选), 默认值为 2.0 m |
| --half_scurve | bool | 是否为弧形曲线(可选), 默认值为 false |
例如:
{
"cmd": "execute_demo",
"data": {
"demo_name": "trace_path",
"parameters": {
"--length": 4.0,
"--amplitude": 2.0,
"--half_scurve": true
}
}
}
注意:
- 弧形曲线是半个 S 型曲线的意思
- length 参数表示 S 型曲线的长度
- 如果类型为弧形曲线, 则实际的曲线 length 为 length / 2
停止演示程序
request:
{
"cmd": "stop_execute_demo"
}
response:
{
"cmd": "stop_execute_demo",
"data": {
"code": 0,
"msg": "Demo execution stopped"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功 1: 停止失败 |
| msg | string | 停止状态信息 |
logger 日志 websocket
这是一个用于实时获取机器人日志的 websocket 服务。服务器会在启动时广播 robot_ws_logger_address 地址,客户端可以通过该地址连接获取实时日志。
连接日志服务
客户端可以通过以下地址连接日志服务:
ws://{robot_ws_logger_address}
日志消息格式
日志消息格式如下:
{
"level": "LEVEL",
"timestamp": "TIMESTAMP",
"message": "MESSAGE",
"module": "MODULE",
"function": "FUNCTION"
}
| 名称 | 类型 | 描述 |
|---|---|---|
| level | string | 日志级别 (DEBUG/INFO/WARNING/ERROR/CRITICAL) |
| timestamp | string | 时间戳,格式:YYYY-MM-DD HH:MM:SS.mmm |
| message | string | 日志消息内容 |
| module | string | 产生日志的模块名 |
| function | string | 产生日志的函数名 |
日志级别说明
| 级别 | 描述 |
|---|---|
| DEBUG | 调试信息,用于开发调试 |
| INFO | 一般信息,用于记录程序运行状态 |
| WARNING | 警告信息,表示可能的问题 |
| ERROR | 错误信息,表示程序错误 |
| CRITICAL | 严重错误,表示程序无法继续运行 |
示例
{
"level": "INFO",
"timestamp": "2024-03-21 14:30:45.123",
"message": "running finish",
"module": "robot_control",
"function": "start_robot"
}
11. 获取音乐列表 (get_music_list)
描述: 获取可用的音乐文件列表。判断音频设备是否下位机,如果在下位机本地音乐文件列表,否则获取上位机的音乐文件列表
请求:
{
"cmd": "get_music_list",
"data": {}
}
响应:
{
"cmd": "get_music_list",
"data": {
"code": 0,
"music_list": [
"/home/robot/.config/lejuconfig/music/music.mp3",
"/home/robot/.config/lejuconfig/music/music.wav"
]
}
}
更新语音控制关键词配置
描述: 更新语音控制关键词配置。注意:
- 接口仅支持全量更新,会使用接口中的上肢动作覆盖原配置中的所有上肢动作。
- 目前仅支持上肢动作配置,不支持下肢动作配置,只能使用默认值。
请求:
{
"cmd": "update_voice_keywords",
"data": {
"右手打招呼": ["打个招呼", "打招呼", "挥挥手"],
"握手": ["握手", "握个手", "握握手"]
}
}
参数说明:
| 名称 | 类型 | 必填 | 描述 |
|---|---|---|---|
| cmd | string | 是 | 命令名称,固定为 "update_voice_keywords" |
| data | object | 是 | 包含动作名称和对应关键词列表的对象 |
注意:
data中的key应该为实际的动作名称,需要和机器人本地目录 ~/.config/lejuconfig/action_files 中的动作名称一致(对于上述例子,需要本地存在 右手打招呼.tact 文件和 握手.tact 文件);value为关键词列表,多个关键词用英文逗号隔开。语音识别出关键词后,会根据配置执行和key同名的动作。
响应:
{
"cmd": "update_voice_keywords",
"data": {
"code": 0,
"message": "Update voice keywords successfully"
}
}
响应参数说明:
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码,0: 成功,1: 更新失败 |
| message | string | 执行结果信息 |
读取语音控制关键词配置
描述: 读取语音控制关键词配置,并根据本地动作文件目录 (~/.config/lejuconfig/action_files) 的实时内容,动态同步上肢动作的配置项,返回最终的配置数据。
注意: 此过程仅在内存中进行,不会修改本地磁盘上的配置文件。同步规则如下:
- 自动新增: 若本地存在动作文件但配置中缺失,则将该动作添加到返回结果中(关键词列表默认为空数组)。
- 保持原样: 若本地文件与配置项均存在,则完全保留原配置内容。
- 自动清理: 若配置中存在某动作,但在本地未找到对应文件,则从返回结果中移除该配置项。
请求:
{
"cmd": "get_voice_keywords"
}
响应:
{
"cmd": "get_voice_keywords",
"data": {
"code": 0,
"message": "Read voice keywords successfully",
"result": {
"前进一步": {
"type": "SINGLE_STEP",
"keywords": ["往前走", "往前走一步", "前进一步"],
"data": {
"direction": "前",
"step": 1
}
},
"右手打招呼": {
"type": "ARM_ACTION",
"keywords": ["打个招呼", "打招呼", "挥挥手"],
"data": "右手打招呼"
}
}
}
}
响应参数说明:
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码,0: 成功,1: 读取失败 |
| message | string | 执行结果信息 |
| result | object | 当前配置的所有关键词信息(失败时为空) |
result格式说明:
- data中每个键值对:key为唯一标识,value定义了动作类型type,关键词keywords,以及动作参数data。暂时只有两种类型:SINGLE_STEP和ARM_ACTION。前者不允许自定义配置,后者允许自定义配置。
- 对于移动控制关键词配置项,暂时不允许自定义配置。value中,属性type为“SINGLE_STEP”;属性keywords为关键词列表;属性data为目标位置和步长,分别表示移动的方向和距离。
- 对于上肢动作关键词配置项,key为动作名称(和value中data属性值相同),value中属性type为“ARM_ACTION”;keywords为关键词列表;data为动作名称,需要和机器人本地目录
~/.config/lejuconfig/action_files中的动作名称一致(不带tact文件后缀)。
导航功能
加载地图
request:
{
"cmd": "load_map",
"data":{
"map_name":"target_map_name"
}
}
response:
{
"cmd": "load_map",
"data": {
"code": 0,
"map_path":"/home/lab/.config/lejuconfig/maps/target_map_name.pgm",
"msg": "Map loaded successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功,1:地图加载成功,但地图下载失败, 2:地图加载失败,且地图下载也失败 |
| map_path | string | 目标地图的图片路径 |
| msg | string | 接口结果的描述 |
获取所有的地图
request:
{
"cmd": "get_all_maps"
}
response:
{
"cmd": "get_all_maps",
"data": {
"code": 0,
"maps":["map1_name","map2_name"],
"msg": "Init successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| maps | list | 地图名字列表 |
| msg | string | 接口结果的描述 |
通过目标位姿进行初始化
request:
{
"cmd": "init_localization_by_pose",
"data":{
"x":0.0,
"y":0.0,
"z":0.0,
"roll":0.0,
"pitch":0.0,
"yaw":0.0
}
}
response:
{
"cmd": "init_localization_by_pose",
"data": {
"code": 0,
"msg": "Init successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 初始化成功,1:初始化失败 |
| msg | string | 接口结果的描述 |
获取当前机器人的位置
request:
{
"cmd": "get_robot_position"
}
response:
{
"cmd": "get_robot_position",
"data": {
"code": 0,
"position":{"png_x":249,
"png_y":476,
"origin_grid_x":249,
"origin_grid_y":202},
"msg": "Get robot position successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| position | list | 点位列表,包含当前机器人位置(png_x,png_y),和地图原点位置(origin_grid_x,origin_grid_y) |
| msg | string | 接口结果的描述 |
零点调试模式
request:
{
"cmd": "zero_point_debug",
"data":{
"zero_point_debug_status":start/exit
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| zero_point_debug_status | string | 零点调试模式状态,start: 开启, exit: 退出 |
response:
{
"cmd": "zero_point_debug",
"data": {
"code": 0,
"msg": "Debug mode set successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 成功,1:设置失败 |
| msg | string | 接口结果的描述 |
机器人状态切换
request:
{
"cmd": "robot_switch_pose",
"data":{"robot_pose":stand/ready/cali_zero}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| robot_pose | string | 机器人状态切换,stand: 站立状态, ready: 半蹲状态, cali_zero: 校准零点 |
response:
{
"cmd": "robot_switch_pose",
"data": {
"code": 0,
"msg": "Debug mode set successfully"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 状态切换成功,1:状态切换失败 |
| msg | string | 接口结果的描述 |
大模型相关功能
1. 设置实时模型api_key
用于设置实时模型的各项key,存入本地指定文件中
注: data中的key可以不全部存在,如data中只有4个条目,未被设置的key将保持原值不变,设为空字符串的key会被覆盖为空值
request:
{
"cmd": "set_api_key",
"data":{
"ark_X-Api-App-ID":"123abc",
"ark_X-Api-Access-Key":"sk-1234567890abcdef1234567890abcdef",
"xfyun_APPID":"",
"xfyun_APISecret":"sk-1234567890abcdef1234567890abcdef",
"xfyun_APIKey":"sk-1234567890abcdef1234567890abcdef",
"ark_analysis_key":"sk-1234567890abcdef1234567890abcdef"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| ark_X-Api-App-ID | string | 火山api app id |
| ark_X-Api-Access-Key | string | 火山api secret key |
| xfyun_APPID | string | 讯飞api app id |
| xfyun_APISecret | string | 讯飞api secret key |
| xfyun_APIKey | string | 讯飞api key |
| ark_analysis_key | string | 火山非实时模型api key |
response:
{
"cmd": "set_api_key",
"data": {
"code": 0,
"msg": "API密钥存储成功"
}
}
{
"cmd": "set_api_key",
"data": {
"code": 1,
"msg": "API密钥存储失败"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 设置成功,1:设置失败 |
| msg | string | 接口结果的描述 |
2. 获取api_key
用于获取已设置的api_key
注: 未设置的key将返回空字符串
request:
{
"cmd": "get_api_key",
}
| 名称 | 类型 | 描述 |
|---|
response:
{
"cmd": "get_api_key",
"data": {
"code": 0,
"ark_X-Api-App-ID":"",
"ark_X-Api-Access-Key":"",
"xfyun_APPID":"123abc",
"xfyun_APISecret":"sk-1234567890abcdef1234567890abcdef",
"xfyun_APIKey":"sk-1234567890abcdef1234567890abcdef",
"ark_analysis_key":"sk-1234567890abcdef1234567890abcdef",
"msg": "API密钥获取成功"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 获取成功,1:获取失败 |
| msg | string | 接口结果的描述 |
| ark_X-Api-App-ID | string | 火山api app id |
| ark_X-Api-Access-Key | string | 火山api secret key |
| xfyun_APPID | string | 讯飞api app id |
| xfyun_APISecret | string | 讯飞api secret key |
| xfyun_APIKey | string | 讯飞api key |
| ark_analysis_key | string | 火山非实时模型api key |
3. 获取模型key状态
用于确认特定模型的key是否已经填充(只验证有无,不验证有效),特定模型包括:(火山,讯飞)
request:
{
"cmd": "get_api_key_status"
"data":{
"type":"realtime"|"non-realtime"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| type | string | 模型类型,可选值:realtime|non-realtime |
response:
{
"cmd": "get_api_key_status",
"data": {
"code": 0,
"type":"realtime"|"non-realtime",
"is_empty":[],
"message":"模型所需的key已经设置"
}
}
{
"cmd": "get_api_key_status",
"data": {
"code": 1,
"type":"realtime"|"non-realtime",
"is_empty":["ark_X-Api-App-ID","ark_X-Api-Access-Key"],
"message":"存在缺失的key"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 所有值都已设置,1:存在缺失的key |
| type | string | 模型类型,可选值:realtime|non-realtime |
| is_empty | array | 未被设置的key的列表 |
| msg | string | 接口结果的描述 |
4. 开启实时对话
request:
{
"cmd": "start_real_time_chat"
}
| 名称 | 类型 | 描述 |
|---|
response:
{
"cmd": "start_real_time_chat",
"data": {
"code": 0,
"msg": "实时对话已开启"
}
}
{
"cmd": "start_real_time_chat",
"data": {
"code": 1,
"msg": "实时对话开启失败"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 开启成功,1:开启失败 |
| msg | string | 接口结果的描述 |
5. 关闭实时对话
request:
{
"cmd": "stop_real_time_chat"
}
| 名称 | 类型 | 描述 |
|---|
response:
{
"cmd": "stop_real_time_chat",
"data": {
"code": 0,
"msg": "实时对话已关闭"
}
}
{
"cmd": "stop_real_time_chat",
"data": {
"code": 1,
"msg": "实时对话关闭失败"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 错误码 0: 关闭成功,1:关闭失败 |
| msg | string | 接口结果的描述 |
6. 实时对话状态查询
request:
{
"cmd": "get_real_time_chat_status"
}
| 名称 | 类型 | 描述 |
|---|
response:
{
"cmd": "get_real_time_chat_status",
"data": {
"code": 1,
"msg": "实时对话正在进行"
}
}
{
"cmd": "get_real_time_chat_status",
"data": {
"code": 1,
"msg": "实时对话未开启"
}
}
| 名称 | 类型 | 描述 |
|---|---|---|
| code | int | 状态码: 1-实时对话正在进行,0-实时对话未开启 |
| msg | string | 接口结果的描述 |
YOLO目标检测
model_utils.py 中 YOLO_detection 为 YOLO目标检测类,用于处理图像检测和结果发布。
load_model(model_path)
加载YOLO模型。
参数:
model_path(str): YOLO模型文件的路径
返回:
- model: 加载成功的YOLO模型对象
- None: 加载失败时返回
get_detections(camera, model)
获取当前图像的目标检测结果。
参数:
camera(str): 相机名称model: YOLO模型对象
返回:
- results: 检测结果列表
- None: 无图像数据时返回
get_max_area_object(results)
从检测结果中返回最大面积的目标。
参数:
results: YOLO检测结果
返回:
{
'x': float, # x坐标
'y': float, # y坐标
'w': float, # 宽度
'h': float, # 高度
'area': float, # 面积
'class_name': str # 目标名称
}
get_min_area_object(results)
从检测结果中返回最小面积的目标。
参数:
results: YOLO检测结果
返回:
{
'x': float, # x坐标
'y': float, # y坐标
'w': float, # 宽度
'h': float, # 高度
'area': float, # 面积
'class_name': str # 目标名称
}
对齐楼梯坐标标定
在上楼梯之前,需要先对齐楼梯,获取目标点相较于 tag 码的偏移,在对齐时走到标定的位置
使用注意
- 请提前将 tag 码按照规定的方式贴在楼梯第三阶的左方,将机器人置于楼梯前,脚尖距离楼梯
2cm处. - 请使用我们提供的 tag 码进行印贴:下载TAG
request:
{
"cmd": "set_align_stair_param",
}
response:
{
"cmd": "set_align_stair_param",
"data": {
"code": 0,
"msg": "align stair set successfully"
}
}
{
"cmd": "set_align_stair_param",
"data": {
"code": 1,
"msg": "align stair set failed"
}
}
Rosbag 到 Tact 文件转换工具
这是一个用于将 ROS bag 文件转换为 Tact 文件格式的工具。它主要用于处理机器人手臂、头部和手指的运动数据,并生成可用于动画或其他目的的 Tact 文件。
功能
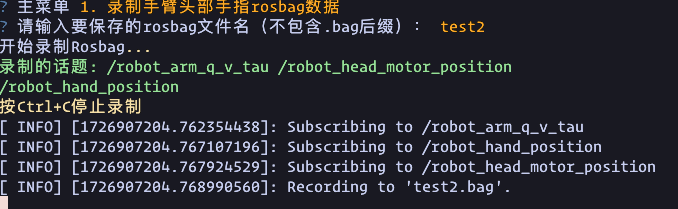
- 录制手臂、头部和手指的 rosbag 数据
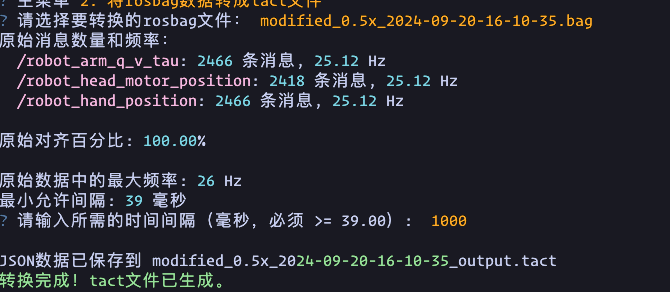
- 将 rosbag 数据转换为 tact 文件
- 数据平滑处理和控制点生成
使用方法
运行主程序:
cd <catkin_workspace>
source devel/setup.bash
cd planarmwebsocketservice
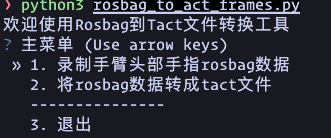
python3 rosbag_to_act_frames.py在主菜单中选择所需的操作:
- 录制手臂头部手指 rosbag 数据
- 将 rosbag 数据转成 tact 文件
按照屏幕上的提示进行操作。
main menu:
record arm, head and hand rosbag:
rosbag to tact:
注意事项
- 确保您有足够的磁盘空间来存储生成的 tact 文件。
- 处理大型 rosbag 文件可能需要较长时间,请耐心等待。
故障排除
如果遇到问题,请检查以下几点:
- 确保所有依赖都已正确安装
- 检查 rosbag 文件是否完整且未损坏
贡献
欢迎提交 issues 和 pull requests 来帮助改进这个工具。