Kuavo 5-W VR操作
1. 终端启动与连接
1.1 以 VR 模式启动机器人
新建终端,进入
kuavo-ros-opensource/目录。执行以下指令启动机器人 VR 模式(需要 root 权限):
cd kuavo-ros-opensource/
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_wheel_vr.launch ip_address:=192.168.8.97 # 替换为当前使用的 VR 设备 IP
1.2 启动机器
在上一步的终端中,输入
o并回车,启动机器。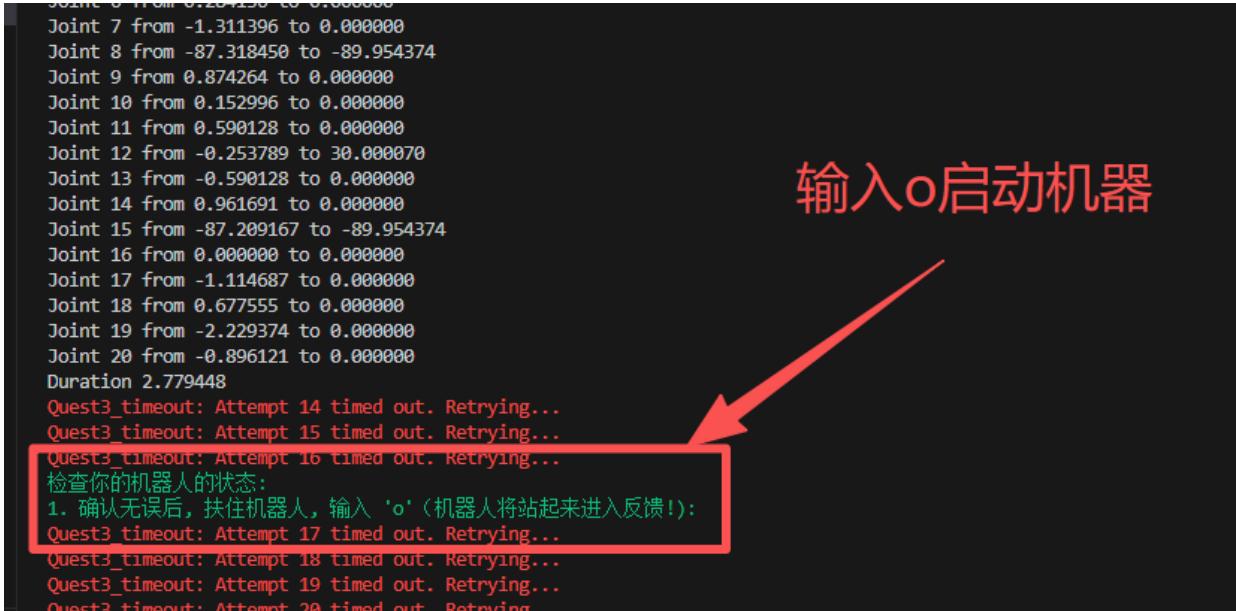
1.3 连接底盘主机并重启服务
新建终端,使用 SSH 登录底盘主机(密码:
133233):ssh -oKexAlgorithms=+diffie-hellman-group14-sha1 \
-oHostKeyAlgorithms=+ssh-rsa \
-oCiphers=+aes128-cbc,3des-cbc \
ucore@192.168.26.22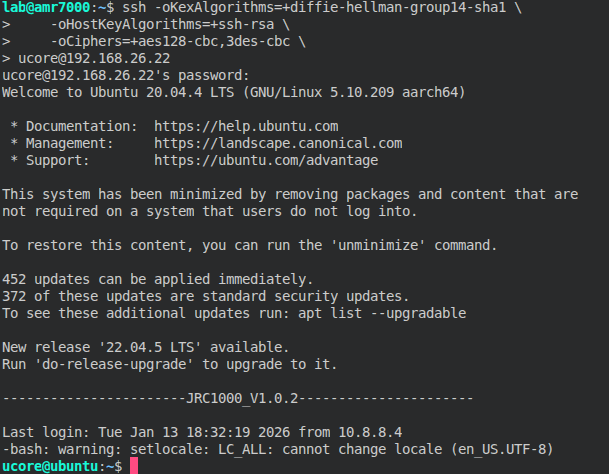
启动服务指令:
sudo systemctl restart urobot.service
1.4 连接 VR 并进入控制
- 头戴 VR 设备,将 VR 设备连接到机器人所连接的 WiFi。
- 打开 VR 程序,此时 VR 眼镜提示长按
meta按钮,并且机器人头部会根据操作者头部同步移动,说明 VR 已成功连接机器人。
2. VR 手柄控制说明
2.1 手部控制(灵巧手)
- 手指张合:按前扳机控制手指张合。
- 拇指开合:触摸
X/A键控制拇指开合。
2.2 腰部控制
- 开启方法:
- 轻触摸X和Y键+按下B 键(注意不是重按X和Y键),此时下肢会同步人体动作。
- 关闭方法:
- 轻触摸X和Y键+按下B 键(注意不是重按X和Y键),此时下肢会复位到初始状态。注意:开启腰部控制后请缓慢移动身体,以避免发生机器人快速运动导致异常损坏。
2.3 手臂解锁/锁定与复位
- 解锁手臂:同时按
X + A键,再按左右上扳机,再按X和A键解锁手臂。 - 复位并锁定手臂:再次同时按下
X + A,此时手臂恢复到初始状态并锁定。 - 后续如需再次解锁,重复按下
X + A即可。
2.4 固定手臂位置
- 固定:同时按下
X + B此时会固定手臂。 - 解锁:再次按
X + B此时会解锁手臂。
2.5 移动控制
- 前进/后退:向前/后推左手柄拨杆。
- 左转/右转:向左/右推右手柄拨杆。
2.5 程序关闭
- 同时按下
X + Y键,此时机器人启动程序关闭
3. 操控流程演示
演示视频: VR遥操视频