Kuavo 5-W 轮臂机器人基础使用
说明
为方便使用,轮臂机器人上肢半身的控制接口与全身上肢接口完全一致,可以适配所有上肢相关案例,配置方式具体可参考上肢控制模式中实物运行-轮臂机器人篇章,上肢控制接口详见接口使用文档,下面主要说明底盘的控制使用以及二次开发接口
软件使用
Xmanger
- 功能:本工具适用于 xManager 地图编辑工具的操作。本手册指导用户完成地图管理、地图编辑、离线建图、在线建图等操作。
使用手册位置:kuavo-ros-opensource/docs/5功能案例/五代案例/轮臂案例/xManager用户手册.pdf
JunionManager
- 功能:本工具适用于 JunionManager 点位校准和遥控的操作。
- 软件获取与注意事项
- 以上软件非网络开源,安装包获取请联系我司相关工作人员。
- 软件获取后需联系我司相关工作人员更新license,才能使用软件。
开发接口
- 目前与底盘的通信主要采用WebSocket的通讯方式,包括请求(Request)与订阅(Subscribe)两种方式。
1. 订阅 (Subscribe)
概述 订阅机制允许客户端接收底盘系统推送的消息,如状态更新、事件通知等。客户端通过建立WebSocket连接并发送订阅请求,底盘系统将根据请求的内容推送相应的消息。
WebSocket连接
连接建立:客户端使用WebSocket协议连接到底盘服务器的特定端点。
心跳机制:为保持连接活性,客户端与服务器之间定期交换心跳消息。
订阅请求格式
{
"type": "subscribe",
"body": {
"topics": ["topic1", "topic2"]
}
}
type:标识请求类型,订阅请求为
subscribe。body:
- topics:一个字符串数组,表示客户端想要订阅的主题列表。
订阅响应格式
{
"type": "notification",
"body": {
"topic": "topic1",
"message": {
// 根据topic不同,消息内容会有所差异
}
}
}
type:标识响应类型,通知为
notification。body:
- topic:与订阅请求中的主题对应,标识消息所属的主题。
- message:具体的消息内容,格式依据主题而定。
支持的订阅主题 以下是目前支持的订阅主题及其简要说明:
- 状态更新 (
status_update):订阅底盘的状态更新,如电池电量、位置信息等。 - 错误日志 (
error_log):接收底盘系统产生的错误日志。 - 事件通知 (
event_notification):底盘系统发生特定事件时的通知,如充电完成、进入故障状态等。
- 示例:订阅状态更新
{
"type": "subscribe",
"body": {
"topics": ["status_update"]
}
}
响应示例:
{
"type": "notification",
"body": {
"topic": "status_update",
"message": {
"battery_level": 75,
"position": {
"x": 10.5,
"y": -3.2
}
}
}
}
2. 请求 (Request)
概述 请求机制允许客户端向底盘系统发送指令或请求,以控制机器人的行为或查询状态。客户端通过建立WebSocket连接并发送请求消息,底盘系统处理这些请求并返回相应的响应。
请求消息格式
{
"type": "request",
"body": {
"action": "get_status",
"params": {}
}
}
type:标识请求类型,普通请求为
request。body:
- action:字符串,表示请求的动作或意图,如
get_status、start_move等。 - params:一个对象,包含执行动作所需的参数。
- action:字符串,表示请求的动作或意图,如
响应消息格式
{
"type": "response",
"body": {
"status": "success",
"data": {
// 根据请求的动作,数据内容会有所不同
},
"error": null
}
}
type:标识响应类型,响应为
response。body:
- status:表示处理结果的状态,如
success或error。 - data:请求成功时返回的数据。
- error:请求失败时的错误信息。
- status:表示处理结果的状态,如
支持的请求动作 以下是目前支持的请求动作及其简要说明:
- 获取状态 (
get_status):请求底盘的当前状态,如电池电量、位置等。 - 启动移动 (
start_move):指令底盘开始移动到指定位置。 - 停止移动 (
stop_move):指令底盘停止当前的移动。 - 充电 (
start_charge):指令底盘前往充电站进行充电。
- 示例:请求获取状态
{
"type": "request",
"body": {
"action": "get_status",
"params": {}
}
}
响应示例:
{
"type": "response",
"body": {
"status": "success",
"data": {
"battery_level": 85,
"position": {
"x": 5.0,
"y": 2.3
}
},
"error": null
}
}
建图使用方法
连接底盘
在机器人下位机终端,通过 ssh 连接到底盘终端(密码:133233)。
ssh -oKexAlgorithms=+diffie-hellman-group14-sha1 \
-oHostKeyAlgorithms=+ssh-rsa \
-oCiphers=+aes128-cbc,3des-cbc \
ucore@192.168.26.22
无线连接
机器人下位机 ssh 的方式连接到底盘终端后,通过下方命令给底盘连接无线网络。
sudo nmcli device wifi connect "your_wifi_name" password "your_password"
连接成功后需修改 /etc/netplan/01-network-manager-all.yaml 解除无线网卡的IP锁定
# Let NetworkManager manage all devices on this system
network:
ethernets:
wlan0:
dhcp4: true
dhcp6: true
#addresses: [172.10.24.200/22]
#gateway4: 172.10.24.254
#nameservers:
# addresses: [192.168.0.1,61.177.7.1,8.8.8.8]
ethernets:
eth0:
dhcp4: no
dhcp6: no
addresses: [10.8.8.8/24]
addresses: [192.168.26.22/24]
version: 2
创建地图
启动下位机 roscore
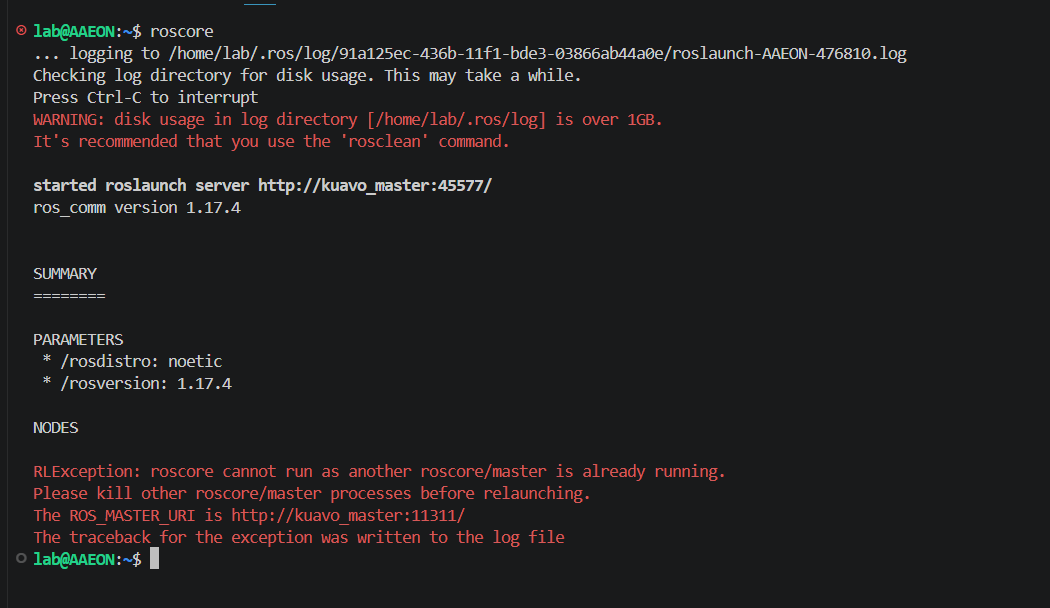
创建地图需启动 roscore,需要在下位机开启 roscore
登陆下位机新建终端输入下方代码,若提示未启动成功,则证明 roscore 已启动,正在运行,请忽略错误提示执行下一步。
roscore
在底盘终端输入下方代码,启动底盘服务(密码:133233)
sudo systemctl restart urobot.service
启动建图与初始化
1.启动 roscore 后打开 xManager 建图软件,点击 离线建图 输入 底盘IP 地址并输入地图名称后点击 连接 按钮
2.待右侧状态栏显示 connected 后点击下方的 开始建图
3.端口:默认12345,不需要修改
4.点击下方的 开始采集 即可控制底盘进行扫图
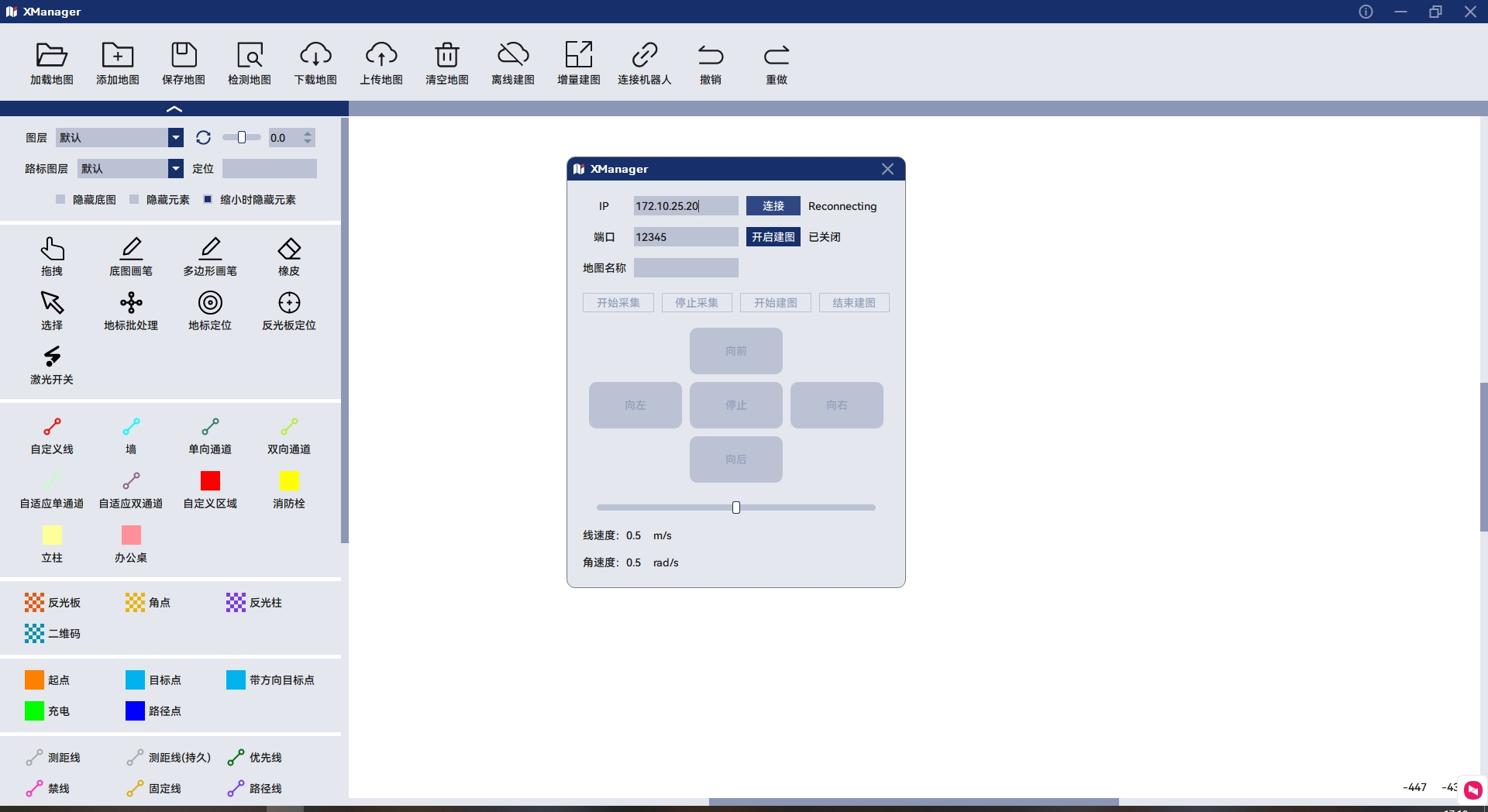
- 注意:点击后需等待20秒,等待建图服务启动完成。可通过Mobaxterm或终端输入
top查看底盘工控机CPU状态,启动结束后,系统CPU资源减少。特别注意不要在CPU资源很高,即建图服务正在启动的时候执行后面的操作。没有等待建图服务正常启动就执行后面的操作,会出现别的问题
5.待扫图结束后,先点击 停止采集,随后点击 开始建图 ,右侧的状态栏此时会显示 start build map
6.待状态栏显示 build map success 后即可点击 结束建图 按钮,此时创建好的地图会显示在软件中,可通过左侧的工具栏对地图进行修改
7.使用任意一种方式连接底盘,回到底盘文件根目录,打开usr/local/urobot/params/map文件夹,打开map.json文件 ,输入想要的地图名称完成切换地图切换。

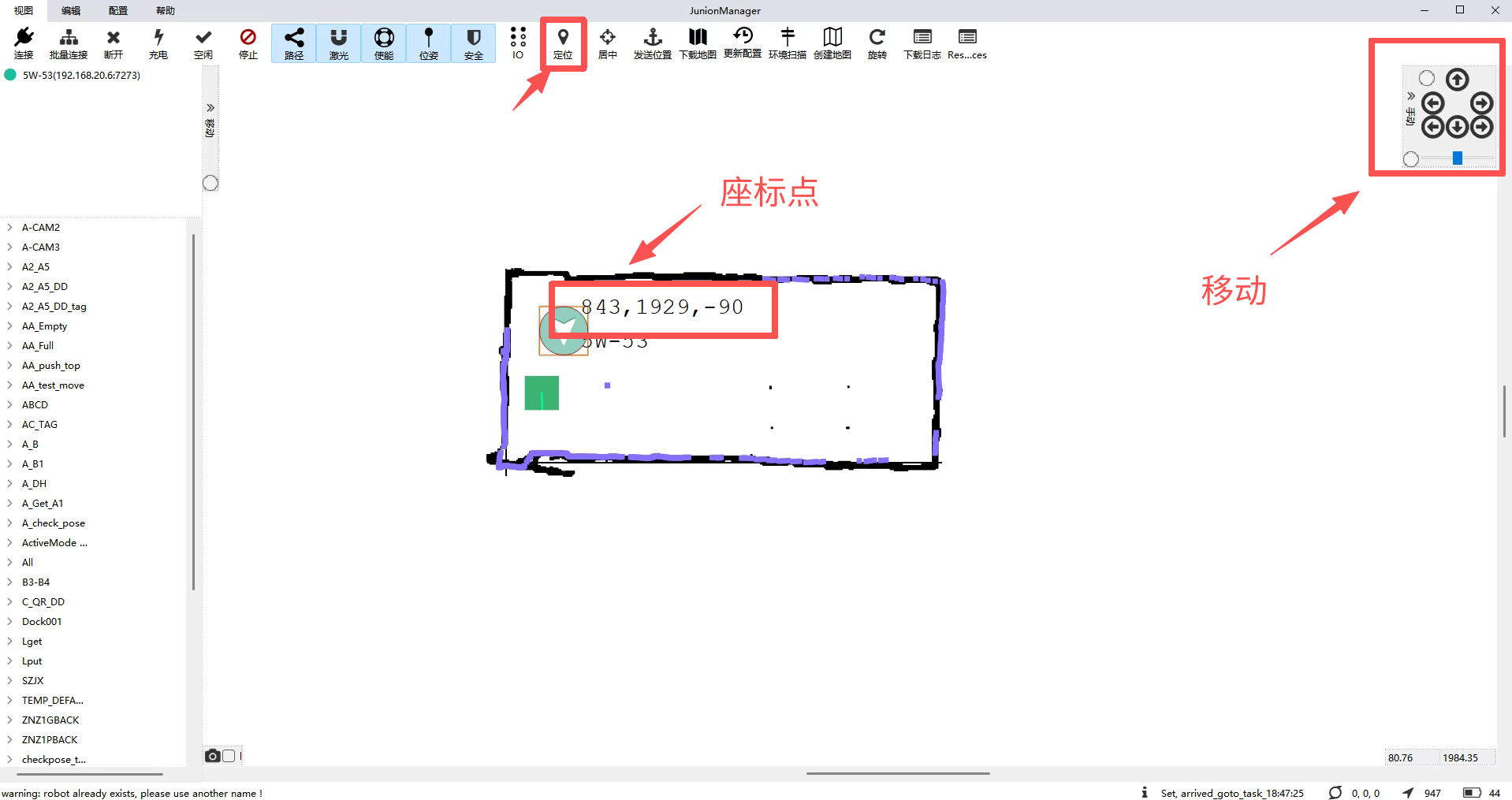
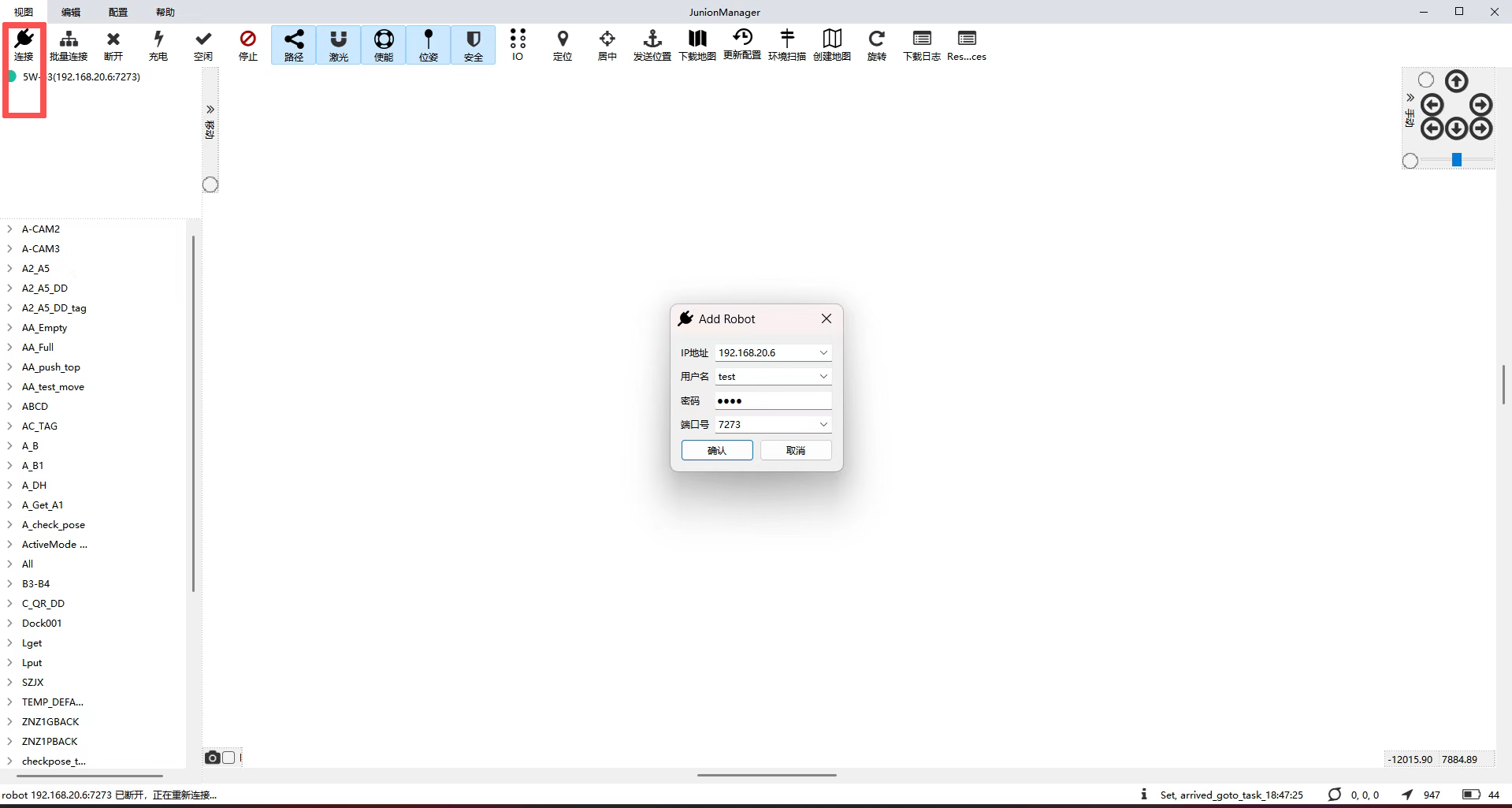
8.打开JunionManager软件,点击上方连接按钮,输入机器人的IP地址,其余参数默认即可,点击确认连接。
9.连接成功后,即可看到刚才创建的地图(显示地7步填写的地图),点击定位手动将机器人的点云与地图匹配。此时完成初始化。右侧可手动控制机器人移动,机器人会显示当前坐标点。地图创建完成。