拆垛案例(数据采集)
说明
- 本案例用于拆垛任务的数据采集:通过 rosbag 录制机器人相关话题,例如相机图像、手臂位置轨迹等。
示例代码
- 仓库:
kuavo-manip-open - 分支:
5w_depalletize - 脚本路径:
collector/runner.py - 描述:该程序用于交互式选择任务并录制 rosbag 文件。
关键函数说明
start_recording(self)/stop_recording(self)- 功能:开始/停止录制 ROS bag 文件。
- 流程:启动录制进程 → 后台持续录制 → 终止录制 → 验证结果 → 反馈用户。
main()- 功能:程序入口,显示主菜单并调用相应功能。
程序逻辑
主菜单
- 提供数据采集的不同选项(示例):
- 任务:左拆 / 右拆 / 搬箱
- 箱子尺寸:
0.4/0.6 - 箱子颜色:绿色 / 灰色 / 黑色
录制 ROS bag 文件
cd kuavo-manip-open/collector/
python3 collector/runner.py -i -n your_task_name --platform wheeled --episodes 100
拆垛数据采集流程
1. 硬件需求
- 机器人需增加两个肩部相机(奥比中光 335L),安装位置如下图所示:

2. 机器人标零
- 手臂和头部限位标零
- 装上最后一个关节的限位环
- 使用限位标零
- 拆掉最后一个关节的限位环(标完一定记得拆)
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_wheel.launch cali:=true
# 根据提示(按 a ...)
# 选择自动限位标零
# 选择标手臂和头部的零点
# 结束后按 s 保存零点
- 手动标零
- 手动将手臂和头摆到零位
- 启动下位机,加上
cali_arm参数
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_wheel.launch cali_arm:=true
# 需要同时标定腿部时可使用(谨慎操作):
# roslaunch humanoid_controllers load_kuavo_real_wheel.launch cali_arm:=true cali_leg:=true


机器人手臂零位示意图
[!NOTE] 使用
cali_leg:=true前请确认安全:
- 按
y后会全身失能,需要人工扶持- 建议将腰部折叠杆放到最低点
- 上半身垂直地面后可略微后仰(约 8°),以获得更稳定姿态
[!IMPORTANT]
头部标零验证(必做):按下面步骤验证 TF 与实测误差。
- 启动
wheel_bridge.py:
python3 src/kuavo_wheel/scripts/wheel_bridge.py
- 查看 TF(将
tag_5按实际使用的 tag id 修改,例如使用tag_1则改为tag_1):
rosrun tf tf_echo odom tag_5
- 用卷尺等方式测量实际值并对比:
X/Y/Z每个方向误差建议不超过 2 cm(通常约 1 cm)odom距离地面上方约 18 cm,对比时需要减去该偏置
3. 相关代码下载及编译
- 原子技能(拆垛,优先下载至下位机运行)
- 下载链接:仓库下载链接
cd kuavo-manip-open
# 切换分支(重要)
git checkout 5w_depalletize
- 上位机代码
git clone https://gitee.com/leju-robot/kuavo_ros_application.git
cd kuavo_ros_application
# 切换分支(重要)
git checkout zxh/depalletizing_task
# 先编译 apriltag_ros
catkin build apriltag_ros
# 再编译全部代码包
catkin build
- 下位机代码
git clone https://gitee.com/leju-robot/kuavo-ros-opensource.git
cd kuavo-ros-opensource
# 切换分支(重要)
git checkout wzr/dev/wheel_arm
# 进入 root 模式
sudo su
# 设置机器人版本号
export ROBOT_VERSION=60
然后完成配置文件准备:
- 在
kuavo-ros/src/kuavo-ros-opensource/src/demo/grab_box/cfg/下新建kuavo_v60/目录 - 将
kuavo_v49/中的bt_config.yaml和对应的xml复制到kuavo_v60/中
最后编译:
catkin clean
catkin config -DCMAKE_ASM_COMPILER=/usr/bin/as -DCMAKE_BUILD_TYPE=Release
catkin build humanoid_controllers ar_control grab_box
4. 环境配置
- 下位机:确保已设置
ROBOT_VERSION=60 - 上位机:配置相机与 Apriltag
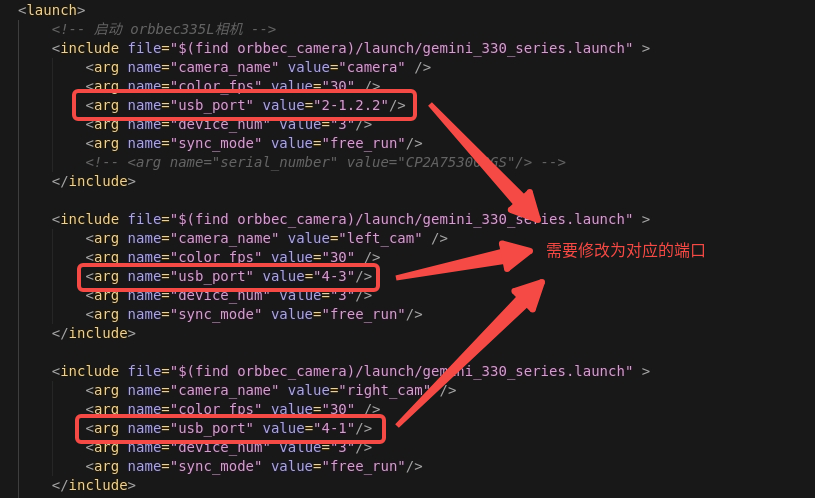
在 kuavo_ros_application/src/dynamic_biped/launch/sensor_orbbec.launch 中修改相机的 usb_port。可参考以下方法获取端口信息:
# 运行后可看到多个相机的 usb_port;再通过序列号区分每个相机对应的端口
cd kuavo_ros_application
source devel/setup.bash
rosrun orbbec_camera list_devices_node
检查 kuavo_ros_application/src/ros_vision/detection_apriltag/apriltag_ros/config/tags.yaml,确认 standalone_tags 内容与下面一致:
standalone_tags:
[
{id: 0, size: 0.08, name: "tag_0"},
{id: 1, size: 0.08, name: "tag_1"},
{id: 2, size: 0.08, name: "tag_2"},
{id: 3, size: 0.08, name: "tag_3"},
{id: 4, size: 0.08, name: "tag_4"},
{id: 5, size: 0.08, name: "tag_5"},
{id: 6, size: 0.08, name: "tag_6"},
{id: 7, size: 0.08, name: "tag_7"},
{id: 8, size: 0.08, name: "tag_8"},
{id: 9, size: 0.08, name: "tag_9"},
]
- 需要录制的 topic(含最低 rate 要求)
/camera/color/image_raw:rate ≥ 25/right_cam/color/image_raw:rate ≥ 25/left_cam/color/image_raw:rate ≥ 25/sensors_data_raw:rate ≥ 480/kuavo_arm_traj:rate ≥ 80/leju_claw_state:rate ≥ 480/leju_claw_command:rate ≥ 80
- 原子技能依赖安装
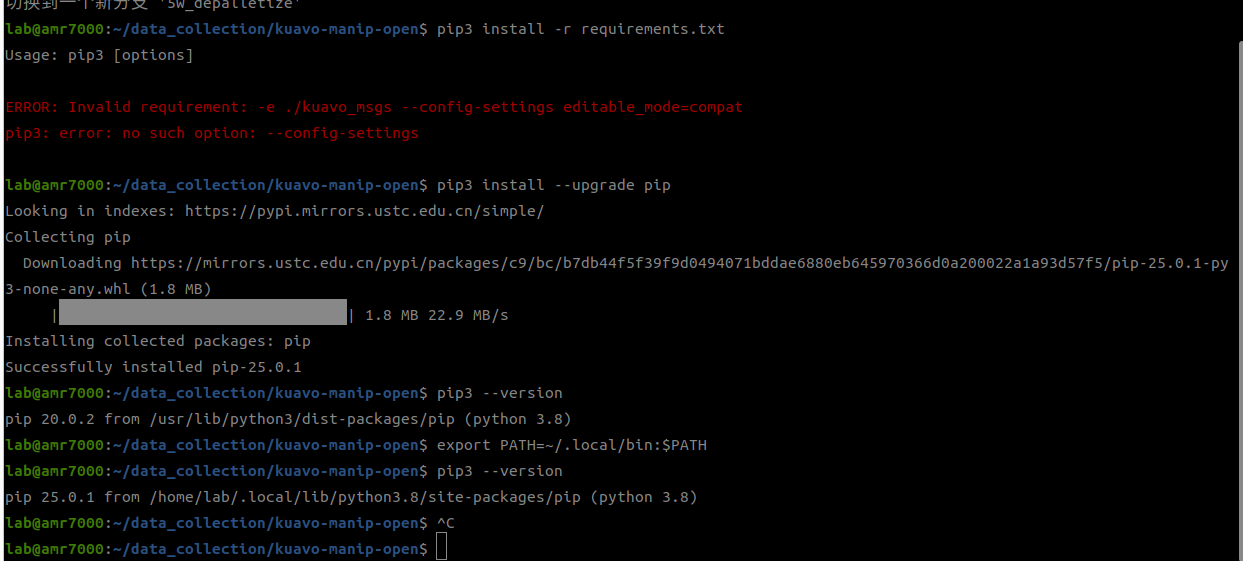
cd kuavo-manip-open
pip3 install -r requirements.txt
# 如遇到:pip3 error: no such option: --config-settings
# 可以先升级 pip(建议 >= 21.x),或移除对应参数后重试
pip3 install --upgrade pip
export PATH=~/.local/bin:$PATH
5. 数采程序运行
5.1 下位机
依次开启多个终端运行(建议按顺序启动):
# 终端 1:启动下位机
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real_wheel.launch
# 终端 2:发布 odom -> base_link 的关节 TF
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
python3 src/kuavo_wheel/scripts/wheel_bridge.py
# 终端 3:策略启动
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch ar_control robot_strategies.launch
# 终端 4:切换控制模式(按 1 回车切到 ArmOnly)
cd kuavo-ros-opensource
sudo su
source devel/setup.bash
python3 src/demo/wheel_arm_demo/wheel_control_mode_swither.py
5.2 上位机
cd kuavo_ros_application
source devel/setup.bash
roslaunch dynamic_biped sensor_orbbec.launch
5.3 机器人拆垛/数采脚本
cd kuavo-manip-open/collector/
# 可阅读 README.md 了解各参数含义
python3 collector/runner.py -i -n your_task_name --platform wheeled --episodes 100
常见微调
- 拆垛时由于
offset不同,可能需要微调手臂放置高度。 - 相关代码位置:
kuavo_humanoid_sdk/kuavo_humanoid_sdk/kuavo_strategy_pytree/nodes/funcs.py
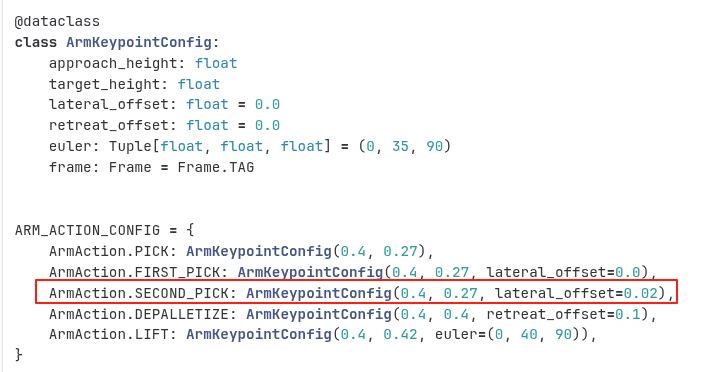
示例:若右手偏高,可将对应数值调小;其他情况按实际偏差对应调整。
根据末端夹子上可能存在的小凸起,过度加紧可能导致夹爪弹开。可通过修改夹爪张合程度进行调整:
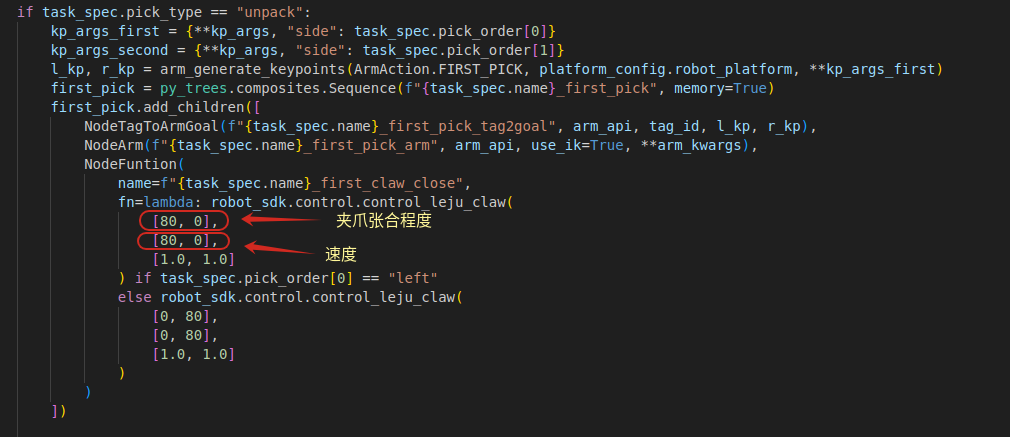
- 建议值:将数值改为
100(电流较大时不会松开)
轮臂使用注意事项
躯干抱闸判断:启动下位机时可能出现躯干抱闸。注意轮臂发出的声音:
- 听到一声“咔”:通常正常
- 听到“咔咔”两声:可能躯干抱闸
此时建议尽快在终端Ctrl+C结束下位机程序,然后重新启动,直到轮臂回归正常零位。
切换控制模式:下位机正常启动后需要切换轮臂控制模式。先运行脚本:
kuavo-ros-opensource/src/demo/wheel_arm_demo/wheel_control_mode_swither.py
终端将显示类似菜单(示例):
==================================================
Mobile Manipulator MPC Control Mode Switcher
==================================================
0: NoControl - no active control
1: ArmOnly - controlling arms only, base fixed
2: BaseOnly - controlling base only, arms fixed
3: BaseArm - controlling both base and arms
4: ArmEeOnly - controlling arms Ee only
q: Quit
==================================================
按 1 回车切换到 ArmOnly 模式以控制手臂和躯干;如需控制底盘,可切换到 2 或 3 模式。