日志导出及可视化
日志说明
我们提供的日志有.log和.bag两种文件,都存放在下位机,这两种文件均以系统时间命名,例如2025-04-14-13-59-42_6.bag。log文件路径为/home/lab/.ros/stdout/年-月-日_时-分-秒/,bag文件路径为/home/lab/.ros/。排查问题时需要查看对应的文件。
下载日志
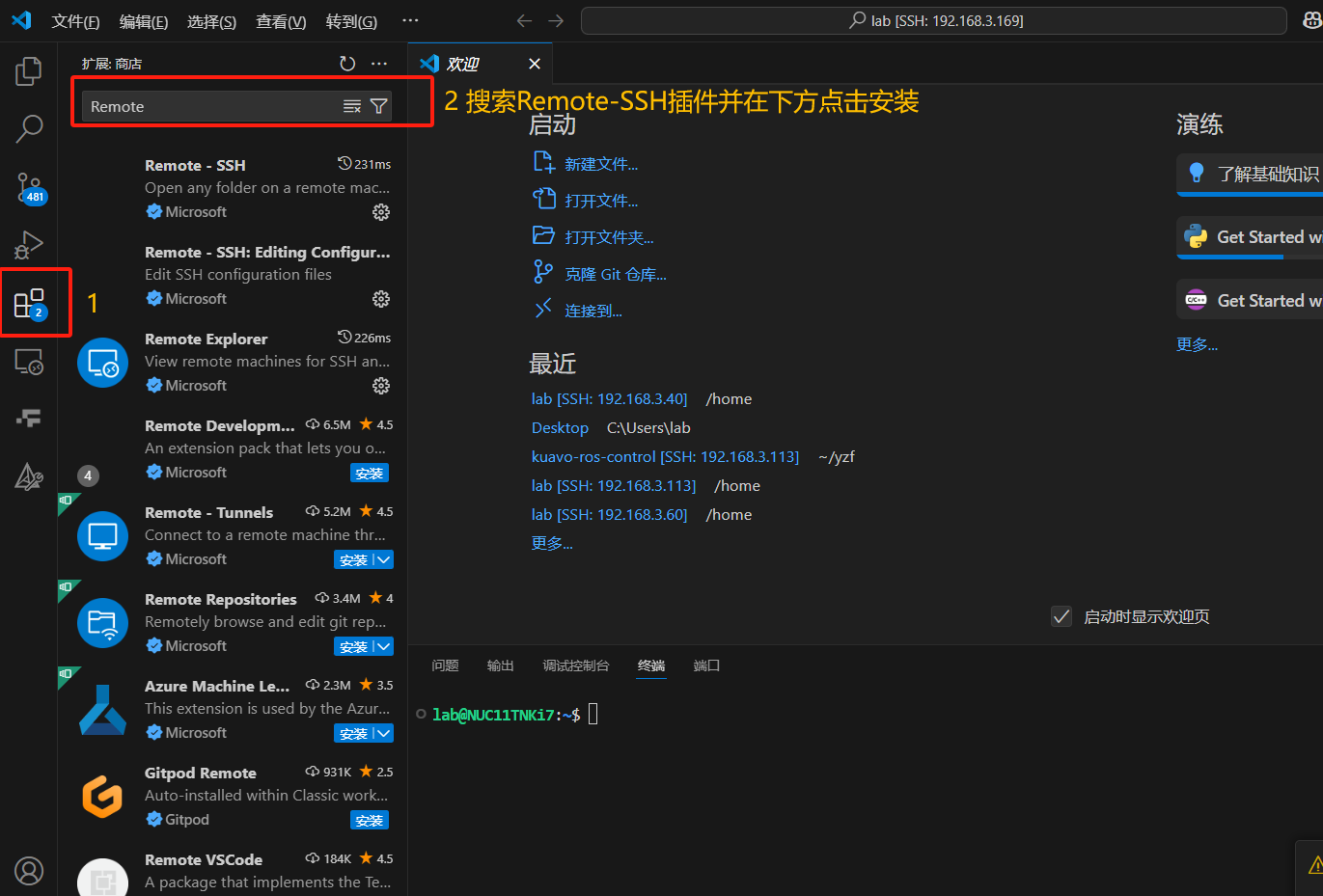
用VScode下载远程连接的插件
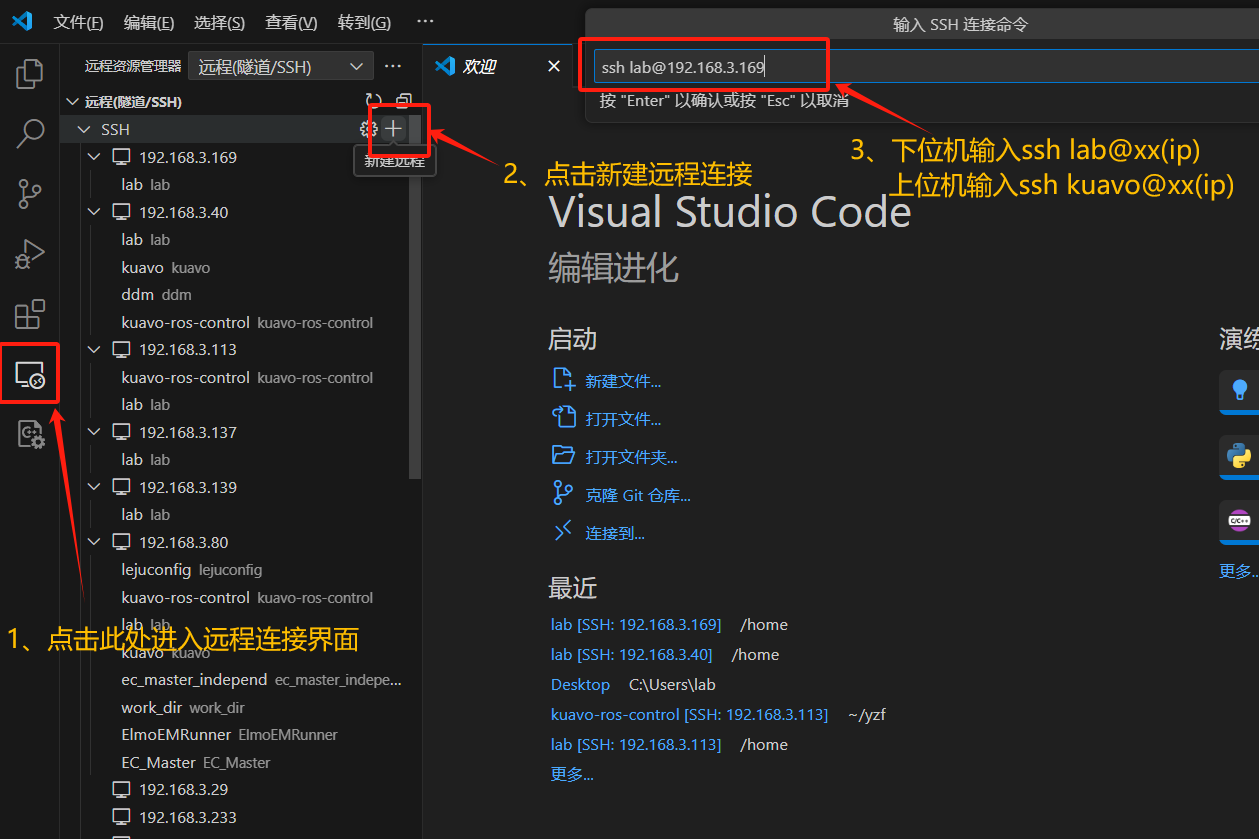
用ssh远程连接机器人电脑
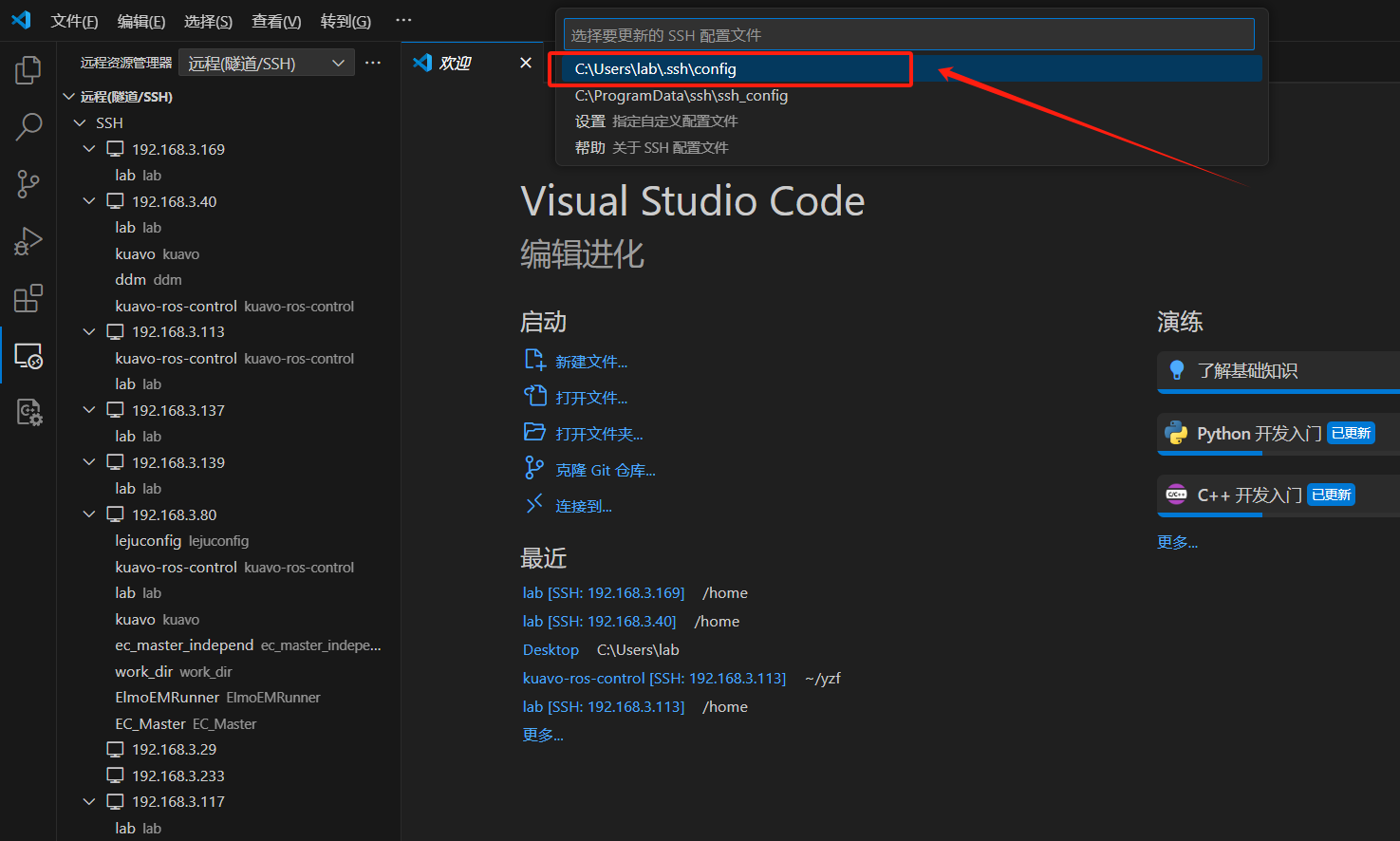
点击配置ssh config
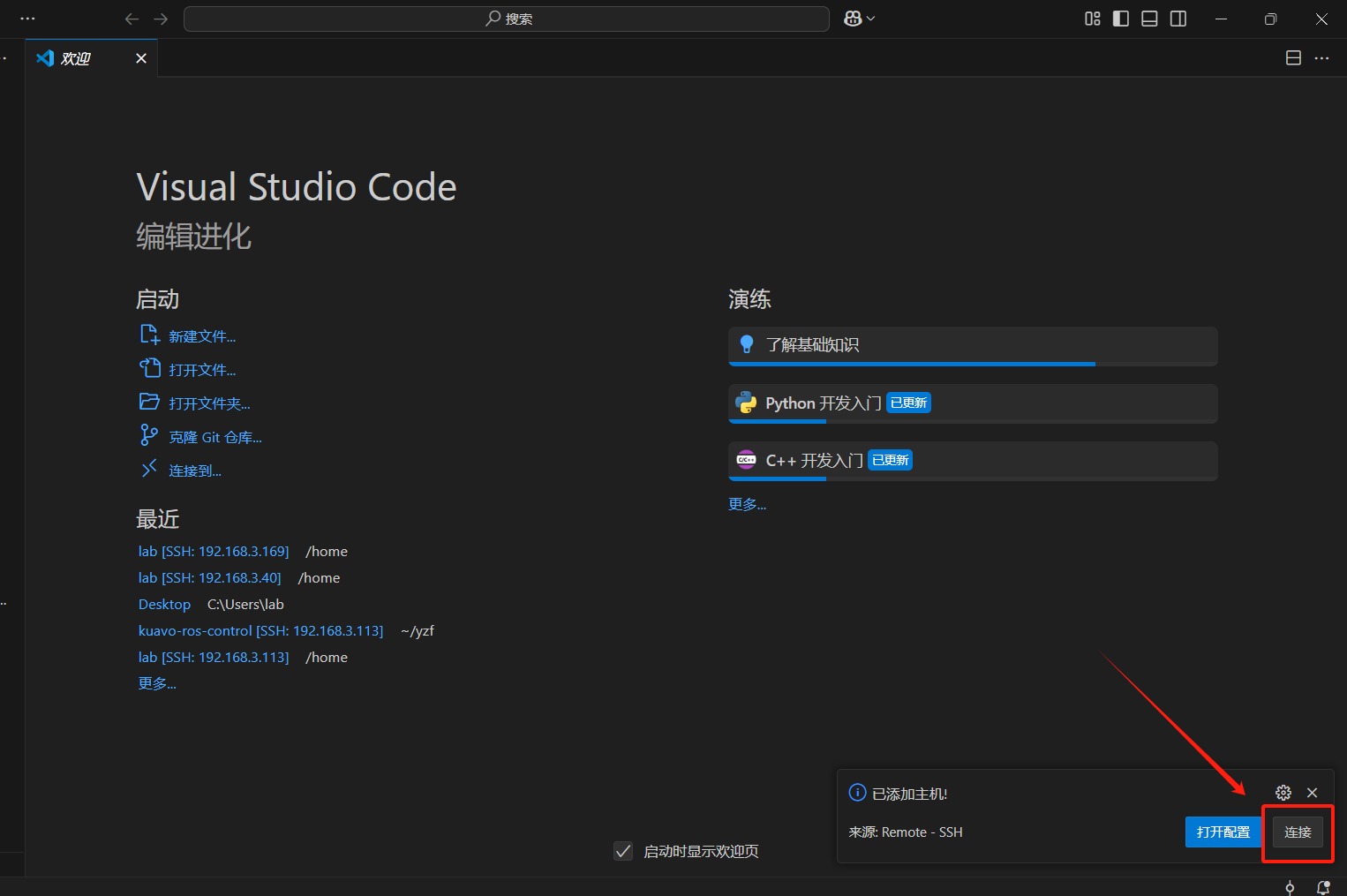
点击连接开始连接机器人电脑
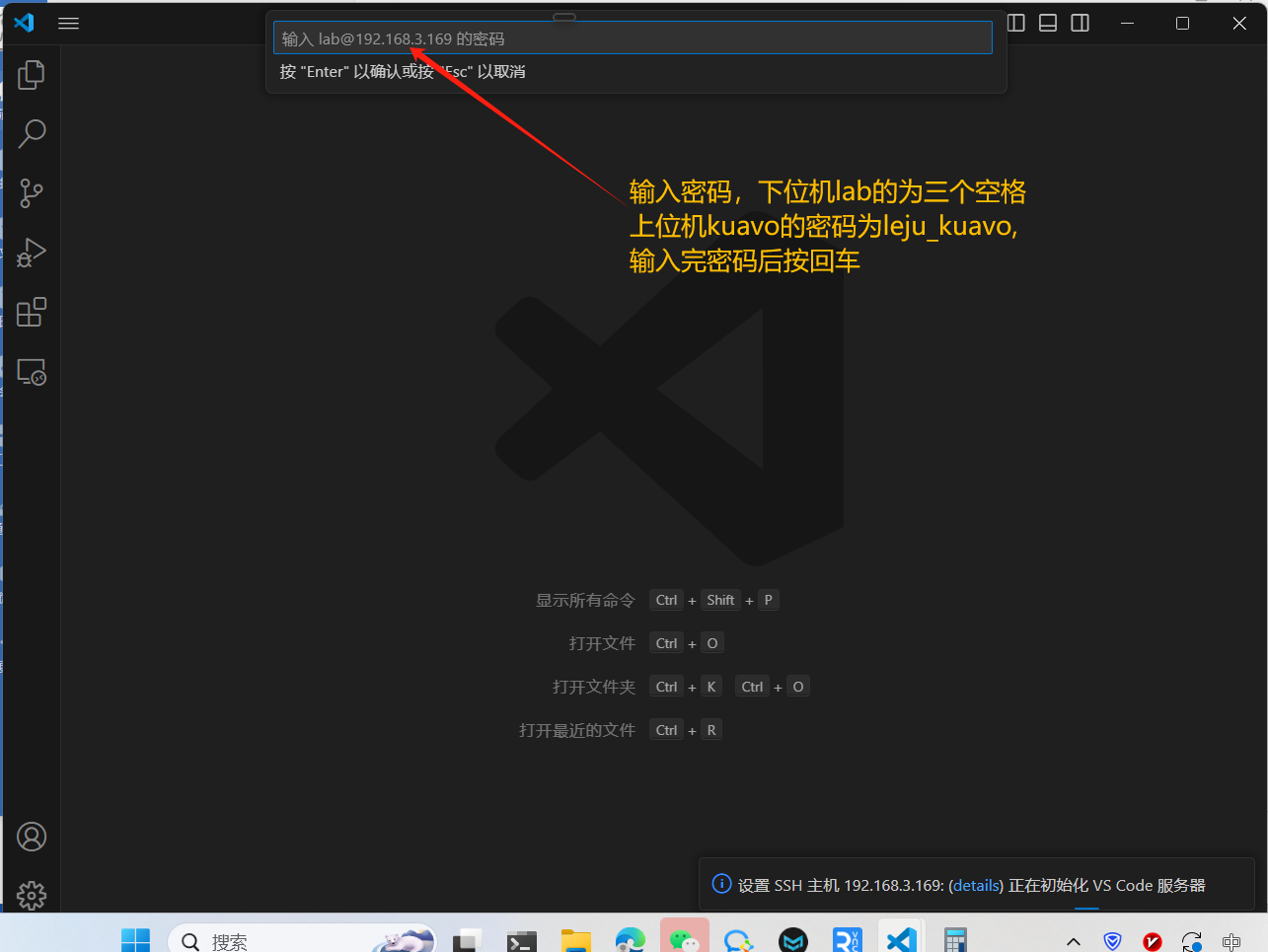
输入密码进入远程连接
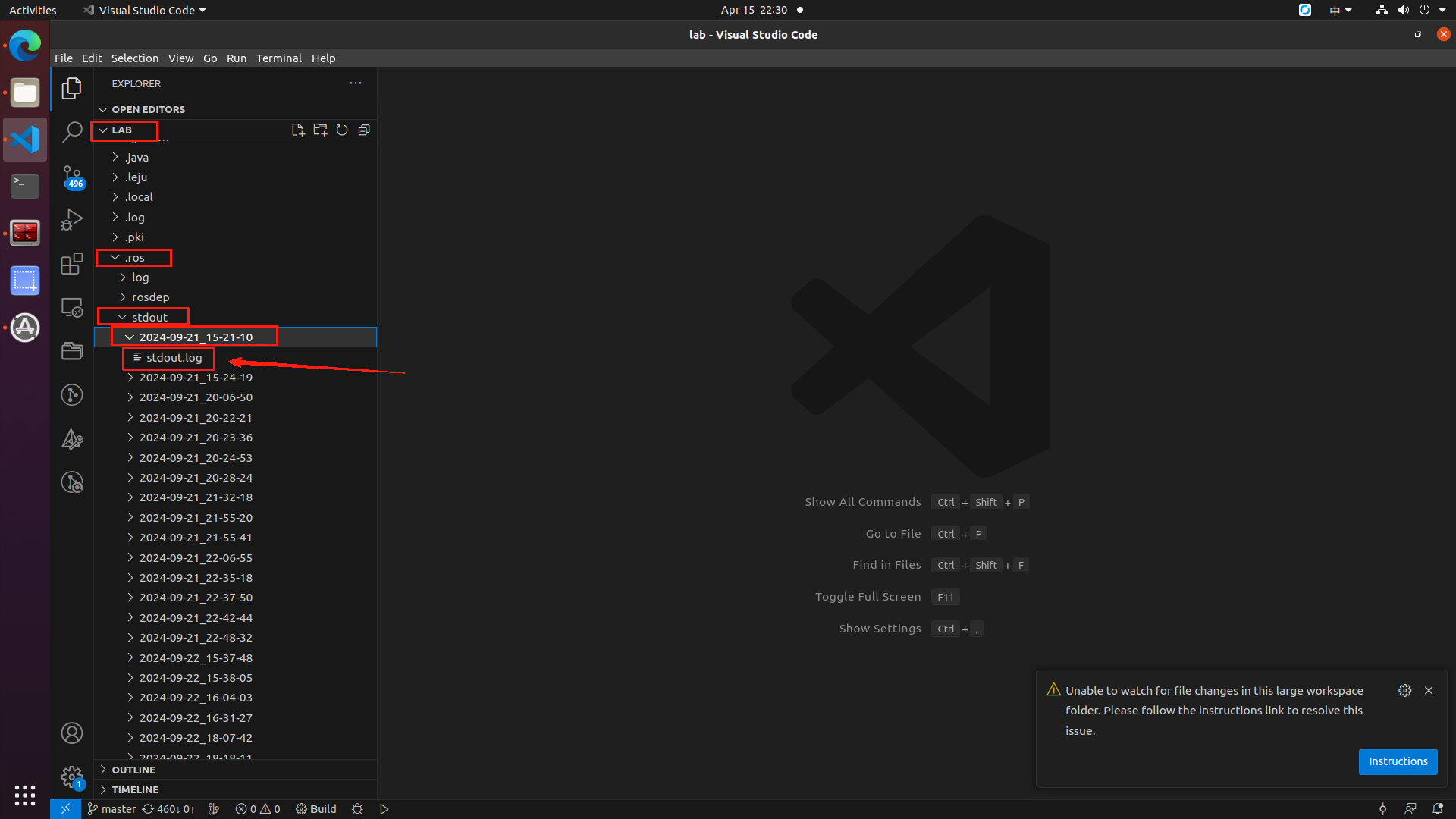
找到~/.ros/stdout/目录并右击文件下载
找到~/.ros目录并右击文件下载
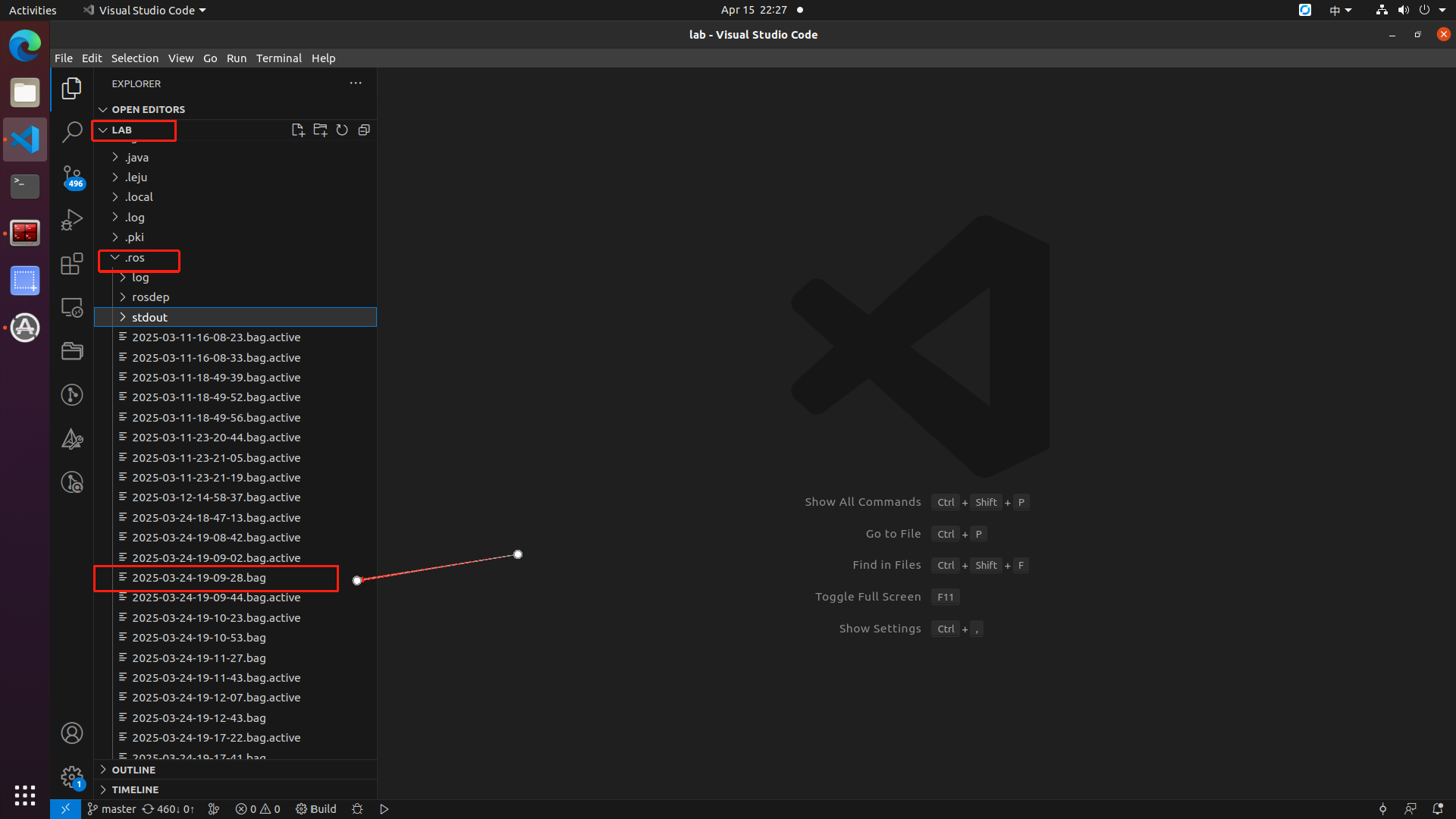
- 有的bag文件后面有.active的后缀,这通常是未正常关闭导致的,索引有问题,使用
rosbag reindex XXXXX.bag修复。如果文件损坏,可能需要恢复或使用工具进一步修复。
- 有的bag文件后面有.active的后缀,这通常是未正常关闭导致的,索引有问题,使用
日志数据说明
一般在查询的时候也是主要针对以下几组数据进行问题的排查
/monitor/system_info/cpu_frequency #cpu内核运行频率
/monitor/system_info/cpu_temperature #cpu内核温度
/monitor/system_info/cpu_usage #cpu利用率占比
/motor_cmd/motor_cur #算法下发的电机目标电流
/motor_cmd/motor_pos #算法下发的电机目标位置
/motor_cmd/motor_vel #算法下发的电机目标速度
/sensor_data/joint_data/error_vec #驱动器报错信息
/sensor_data/joint_data/joint_cmd_torque #驱动器收到的电流指令
/sensor_data_motor/motor_cur #电机反馈的真实电流
/sensor_data_motor/motor_pos #电机反馈的真实位置
/sensor_data_motor/motor_vel #电机反馈的真实速度
/state_estimate/imu_data_flitered/angularVel #经过滤波后的质心欧拉角数据
/state_estimate/imu_data_flitered/linearAccel #经过滤波后的质心线加速度
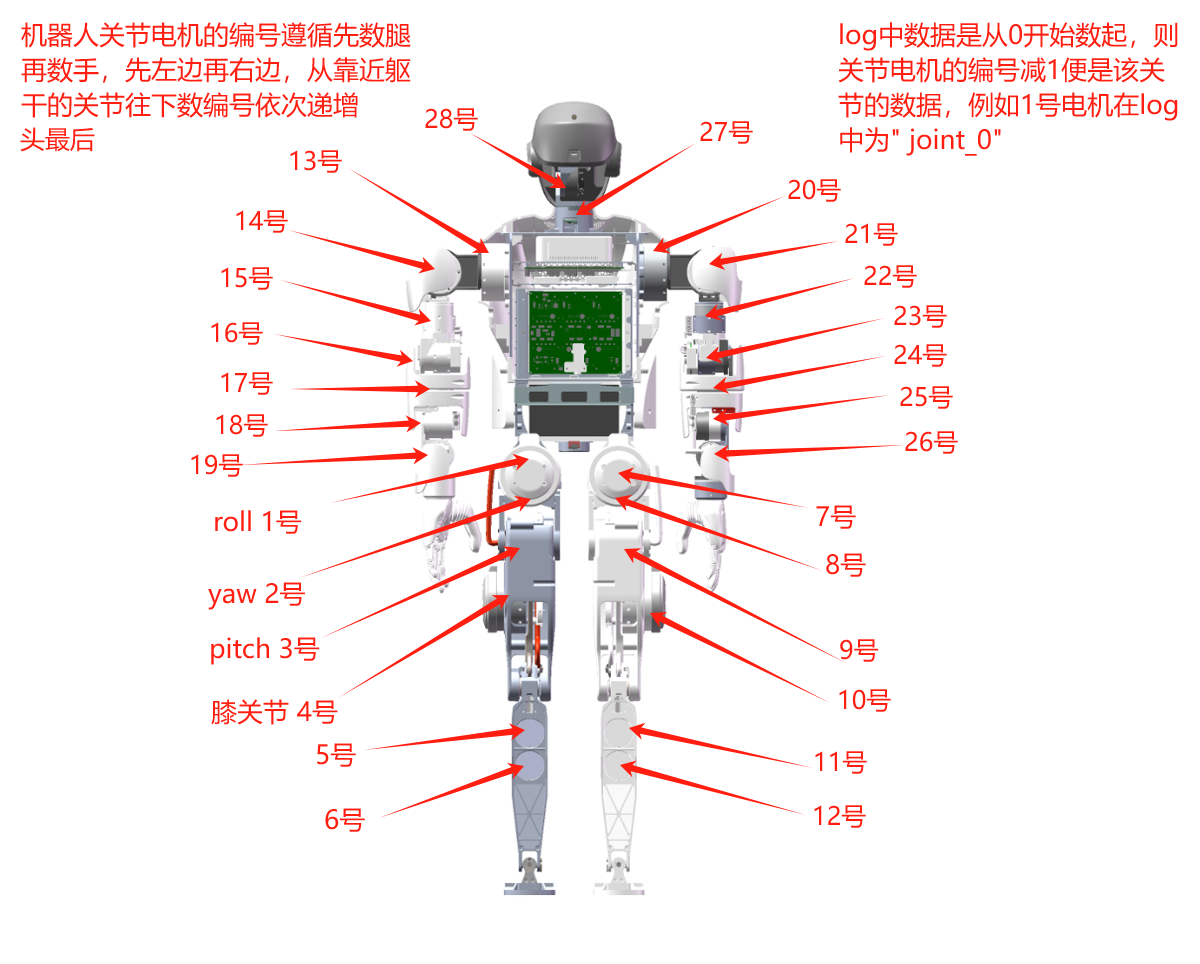
- 电机编号定义
控制类相关的数据
/humanoid_controller/*机器人质心部分
/humanoid_controller/com/com/r:质心位置,依次为x,y,z轴向的平移位置,单位 m/com/r_des: 质心期望位置,同上,可与质心位置对比跟踪效果/com/rd:质心速度 单位m/s/com/rd_des:质心期望速度
监控类型数据
/monitor/*监控wbc、mpc控制频率
/monitor/frequency/*/frequency/mpc:mpc控制频率 单位: Hz/frequency/wbc:wbc控制频率 单位:Hz
监控wbc、mpc计算时间
/monitor/time_cost/*/time_cost/mpc:mpc每次计算所花费的时间 单位:ms/time_cost/wbc:wbc每次计算所花费的时间 单位:ms
监控CPU
/monitor/system_info/*/system_info/cpu_frequency:运动控制电脑的CPU各个核心的运算频率 单位:MHz/system_info/cpu_temperature:运动控制电脑的CPU各个核心的温度 单位:℃/system_info/cpu_usage:运动控制电脑的CPU各个核心的使用占比 单位:%
IMU传感器的原始数据
/sensor_data_raw/imu_data/*imu_data/acc:IMU反馈的加速度计数据imu_data/free_acc:去掉重力项的IMU加速度计数据imu_data/gyro:IMU反馈的角速度计数据imu_data/quat:IMU反馈的四元数数据
实物电机的下发指令和反馈数据
经过处理和换算后的下发给电机驱动层的数据
/motor_cmd/*motor_cmd/motor_cur:经过换算、滤波等步骤后下发给驱动电机层的力矩 单位:N*mmotor_cmd/motor_pos:经过换算、滤波等步骤后下发给驱动电机层的角度 单位:radmotor_cmd/motor_vel:经过换算、滤波等步骤后下发给驱动电机层的角速度 单位:rad/sec
电机驱动层反馈回来的电机传感器数据
/sensor_data_motor/*sensor_data_motor/motor_cur:电机驱动层反馈的电机电流值 单位:安培,Asensor_data_motor/motor_pos:电机驱动层反馈的电机角度值 单位:radsensor_data_motor/motor_vel:电机驱动层反馈的电机角速度值 单位:rad/sec
bag可视化
- 可视化ros的bag有多种方式,例如ros的插件PlotJuggler或者Foxglove这种开源的机器人开发工具,主要用于机器人数据的可视化和调试。
PlotJuggler
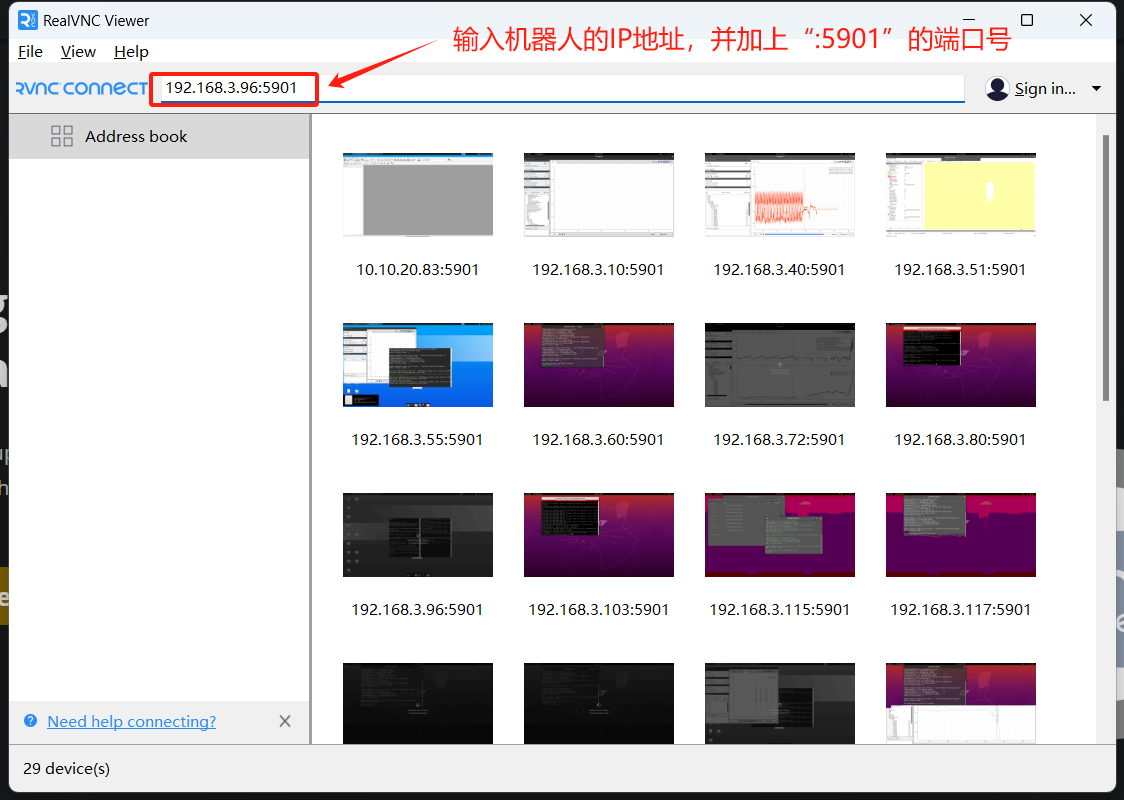
根据机器人IP连接机器人电脑界面

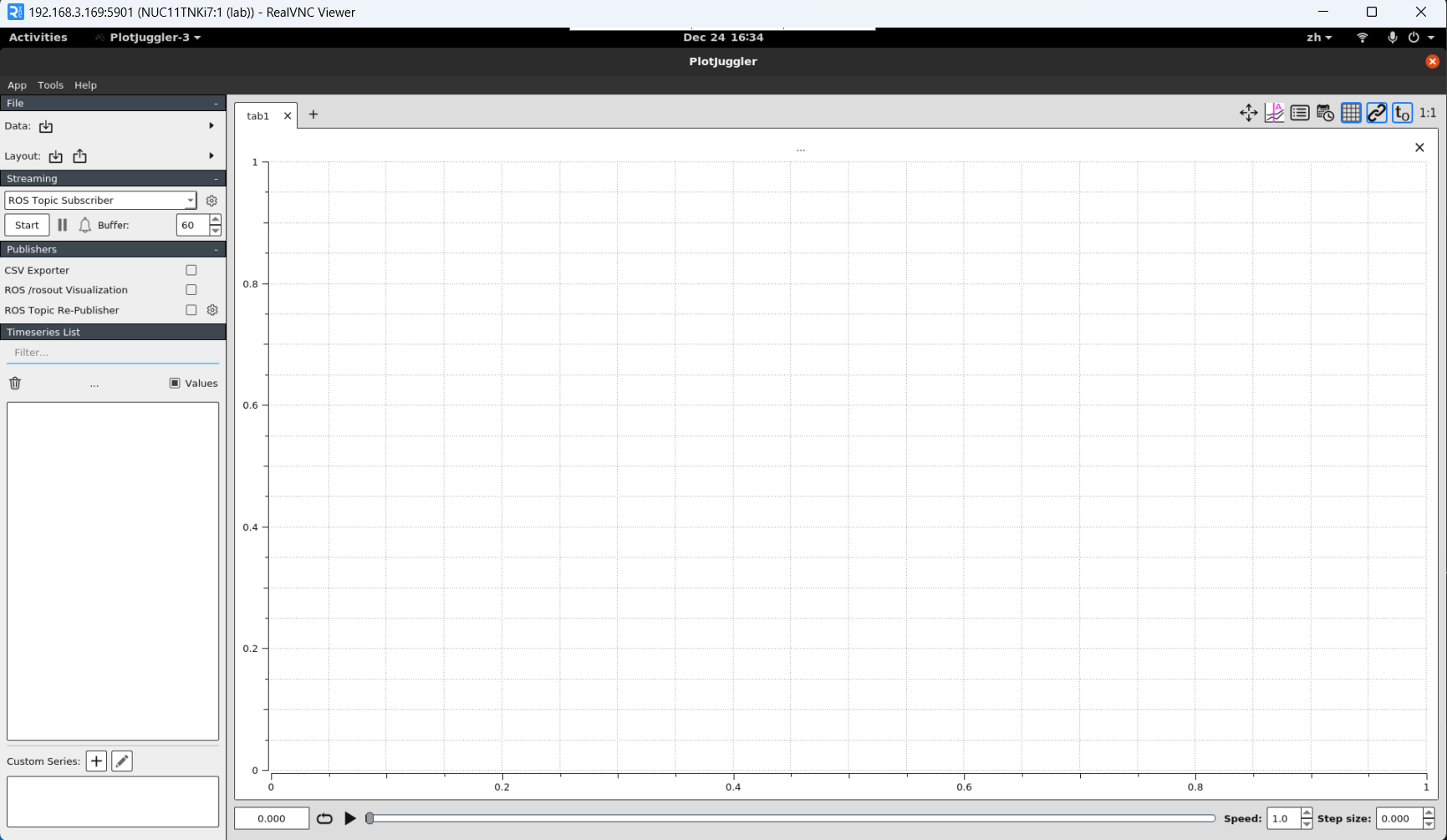
启动plotjuggler软件
鼠标点击窗口进入VNC内部,按Ctrl+Alt+T打开终端,输入以下指令并按回车打开软件
rosrun plotjuggler plotjugglerplotjuggler界面
Foxglove
推荐配置
- 我们提供一个配置模板,用户也可以根据自身需求自定义。模板路径:
/home/lab/kuavo-ros-opensource/docs/6常用工具/leju-layout.json
使用步骤
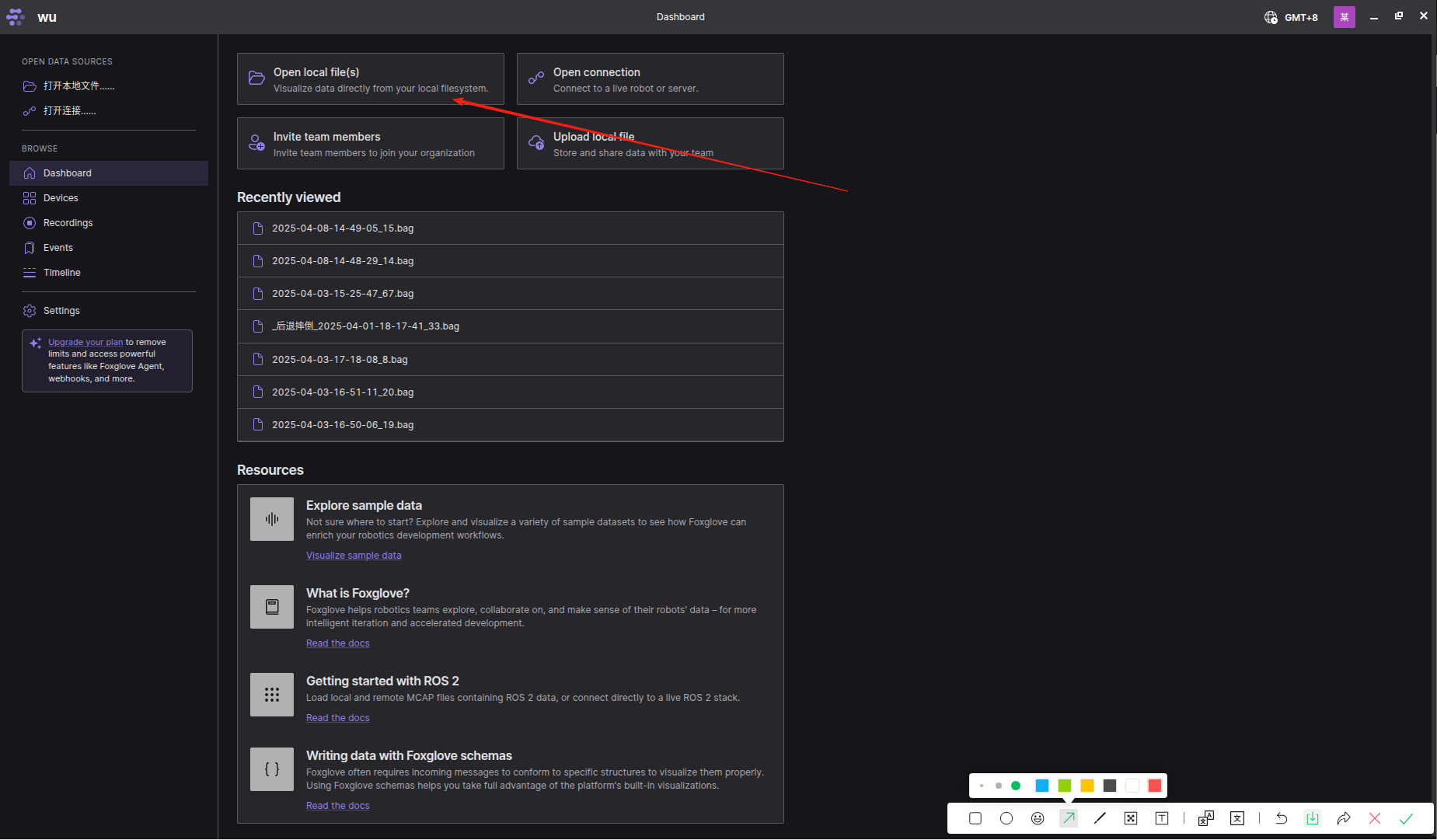
导入bag包
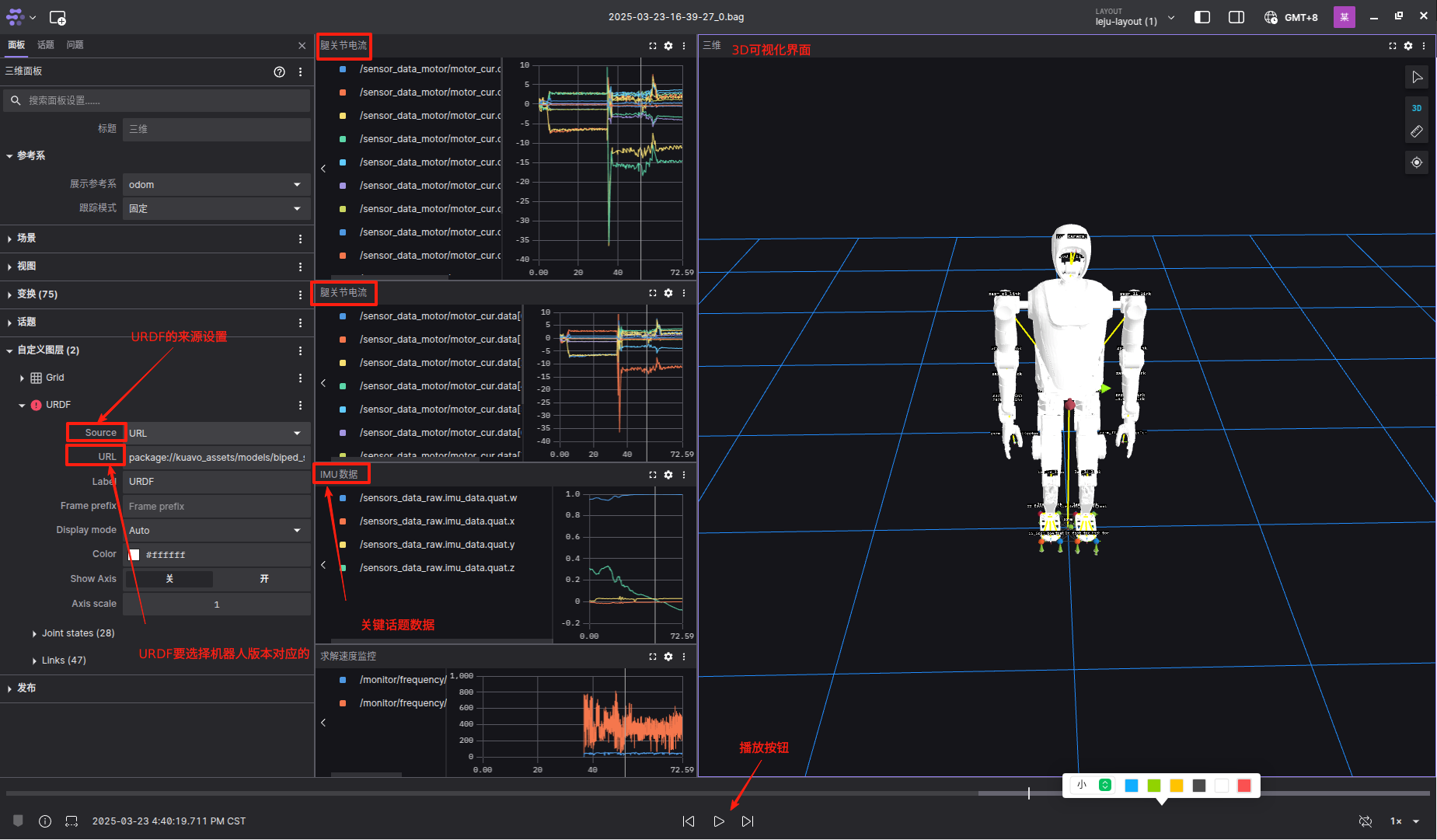
导入json配置文件

可视化界面介绍
官方文档
- foxglove中组件的说明详见官方文档:https://docs.foxglove.dev/docs