辨识手臂和头部电机方向
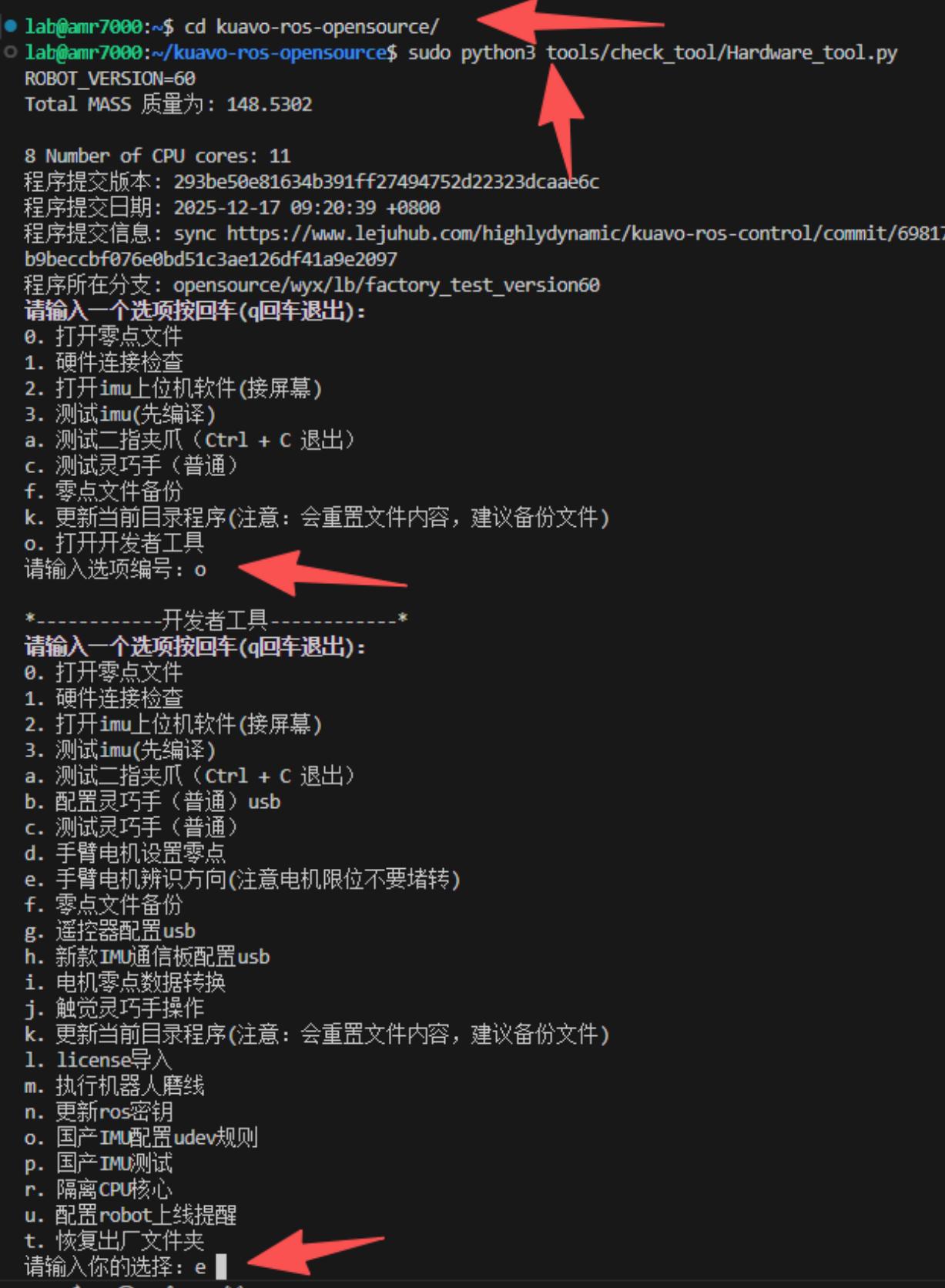
1、新建终端,执行以下命令启动工具:
cd kuavo-ros-opensource/
sudo python3 tools/check_tool/Hardware_tool.py
2、在工具界面依次输入 o,再输入 e,如下图:
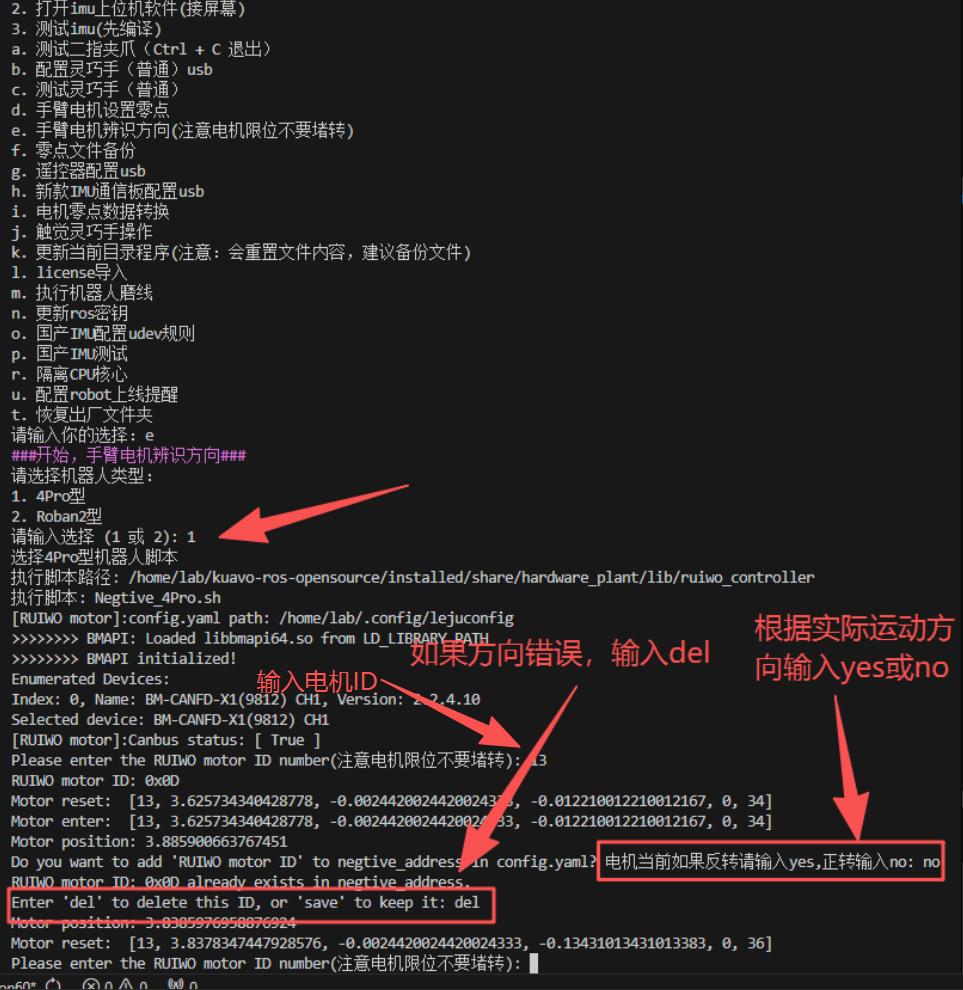
3、输入 1 进入方向辨识模式(当前暂使用 4pro 流程进行手臂/头部电机方向辨识),然后按提示逐个辨识:
- 电机旋转的正方向与机器人坐标系的正方向一致,符合右手定则。
- 右手定则判定方法:右手握住电机旋转轴,让拇指指向旋转轴的正方向(与机器人坐标系正方向一致),其余四指弯曲方向即为旋转正方向。
- 机器人坐标系正方向:向前为 x 轴正方向,向左为 y 轴正方向,向上为 z 轴正方向。
- 输入电机 ID:范围为
1~14(1为左手 1 号电机,14为头部最后一个电机) - 确认方向:观察电机实际运动方向,选择
yes(反转)或no(正转) - 继续下一个电机:若方向正确,直接输入下一个电机 ID 继续
- 方向不对时重做:输入
del删除刚才的设置后,重新辨识一次,确保修改生效
如下图: