H12日志串口功能使用说明
概述
H12日志串口功能允许用户通过遥控器查看机器人的实时日志输出。该功能通过 USB 转串口设备连接到 Multi link V1.0 模块,实现日志数据的无线传输。
硬件连接
所需硬件
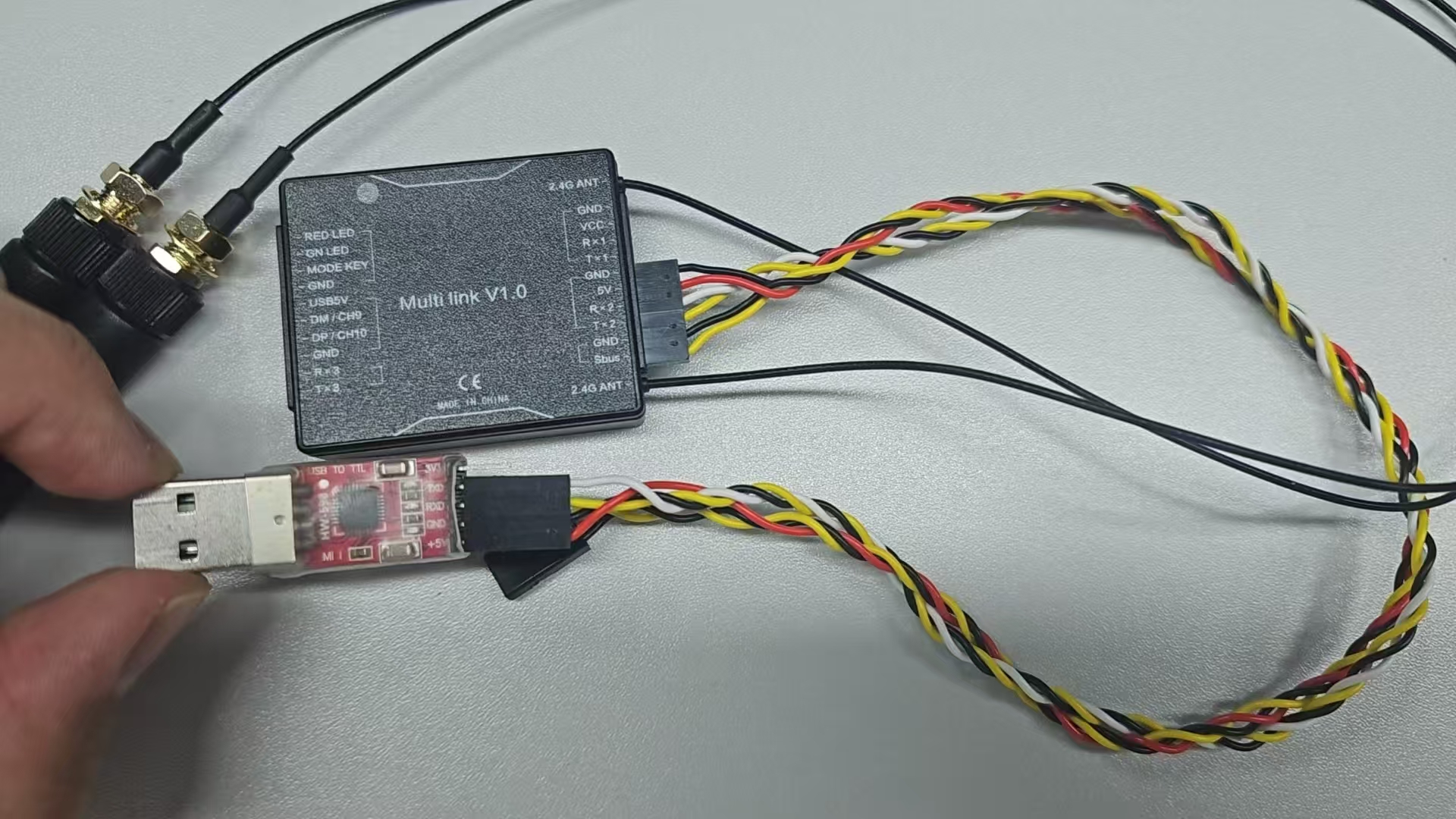
- Multi link V1.0模块:2.4GHz无线通信模块
- USB转串口转换器:用于连接下位机和 Multi link 模块
- 连接线:用于连接两个模块
硬件连接示意图
部署配置
特别注意
- 如果机器人有改装,即 sbus 和 log 的接口都连接,选择第一种方法:自动部署脚本。
- 如果机器人没有接线,选择第二种方法:手动加载串口规则。
- 需要使用两个 H12,原本的 H12 用于启动机器人,外接的 H12 才能查看 log。
- 第二个 H12 的接收机不可以连接 sbus 针脚,接好线后连到机器人的下位机。
- 如果操作失误使用了方案一,需要拔掉第二个 H12 接收机,重新运行 H12 部署脚本,选择跳过 log 串口的规则,然后重启机器,再将第二个 H12 接收机连接到机器人上使用。
1. 自动部署脚本
使用 deploy_autostart.sh 脚本进行一键部署:
cd src/humanoid-control/h12pro_controller_node/scripts
./deploy_autostart.sh
关键配置选项
串口规则加载:
- 脚本会询问是否加载遥控器 log 串口udev规则
- 选择'y':自动加载H12_log_serial.rules规则
- 选择'n':跳过规则加载
2. 手动加载串口规则
如果需要单独加载串口规则,可以使用:
cd src/humanoid-control/h12pro_controller_node/scripts
sudo ./load_h12_log_serial_rule.sh
规则文件说明
udev规则文件 H12_log_serial.rules 配置:
- 设备识别:USB 厂商ID 10c4,产品ID ea60 (后续如果更换串口,请联系开发人员修改)
- 权限设置:组为 dialout,模式为 0777
- 符号链接:创建
/dev/H12_log_channel设备文件 - 串口配置:波特率 57600,8数据位,无停止位,无奇偶校验
3. H12 遥控器 LOG 软件安装

下载链接
https://kuavo.lejurobot.com/H12SerialLogApks/kuavo_h12_controller.apk
安装方式
- 用数据线将 H12 遥控器连接到电脑
- 将下载的软件放到 H12 的文件夹
- 在 H12 遥控器的文件管理器找到并安装
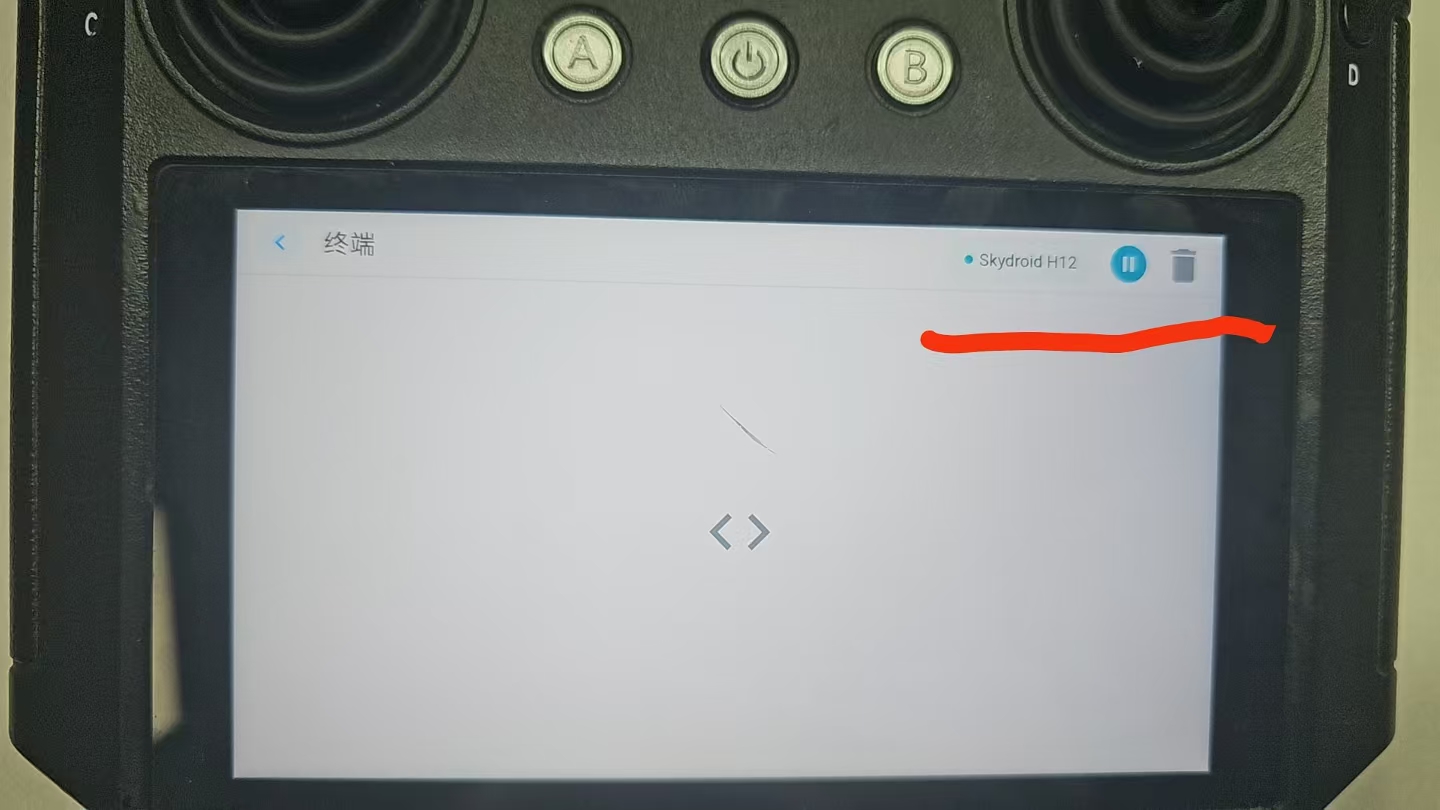
- 打开软件,选择
终端 - 右上角有
清除和暂停